-
Air001 TIM16通用定时器作PWM输出和延时使用配置方法
Air001 TIM16通用定时器作PWM输出和延时使用配置方法
- ✨本文将通过2个工程配置案例分别实现:TIM16通用定时器作PWM输出和延时使用。
- 👉🏻本次利用
STM32CubeMX工具,选择一款M0内核的芯片,配置一个所需功能的工程,然后从所生成的工程中将所需的目标驱动文件拷贝到Air001工程中使用,这样就快速部署完成了一个所需功能的工程框架。可以避免自己手写配置出bug的可能,通用性还是非常高,甚至PWM输出映射引脚都不需要做修改,当然也不排除STM32CubeMX生成的代码有bug问题。 - 🔰对于代码通用性,一定要参照Air001数据手册上的资源外设描述对比来确定,不能盲从。
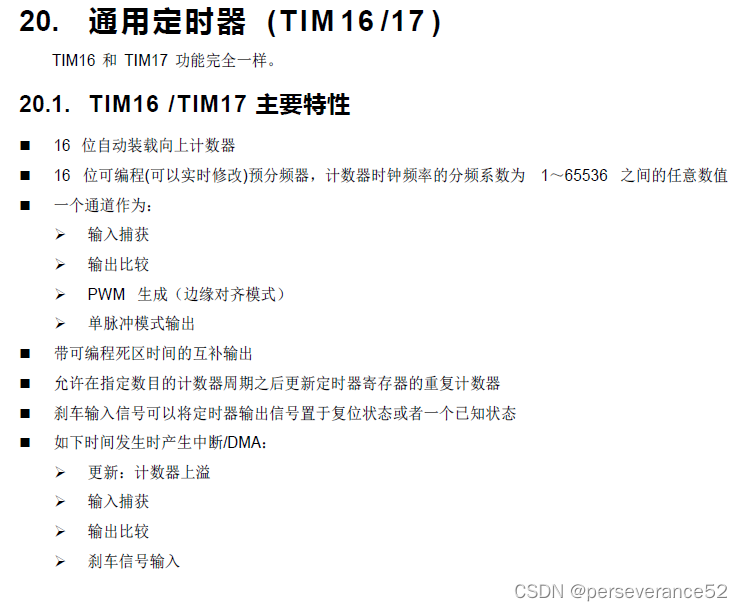
🔖通过现有的SDK资源,所能提供的公开资料里面,只有定时器1和定时器3的相关内容,结合数据手册上看,定时器16/17作为通用定时器,还是有一些差异。
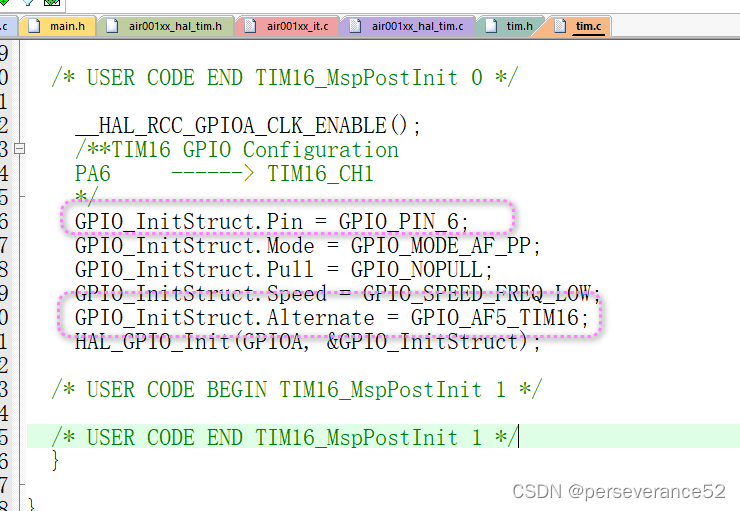
- 🌿查看Air001芯片数据手册,定时器16 PWM输出通道1,PA6引脚复用AF5,与
STM32F030R8,一致,如果是其他定时器,不一样的话,需要注意修改对应的复用引脚。

- 🌿对应生成的代码:
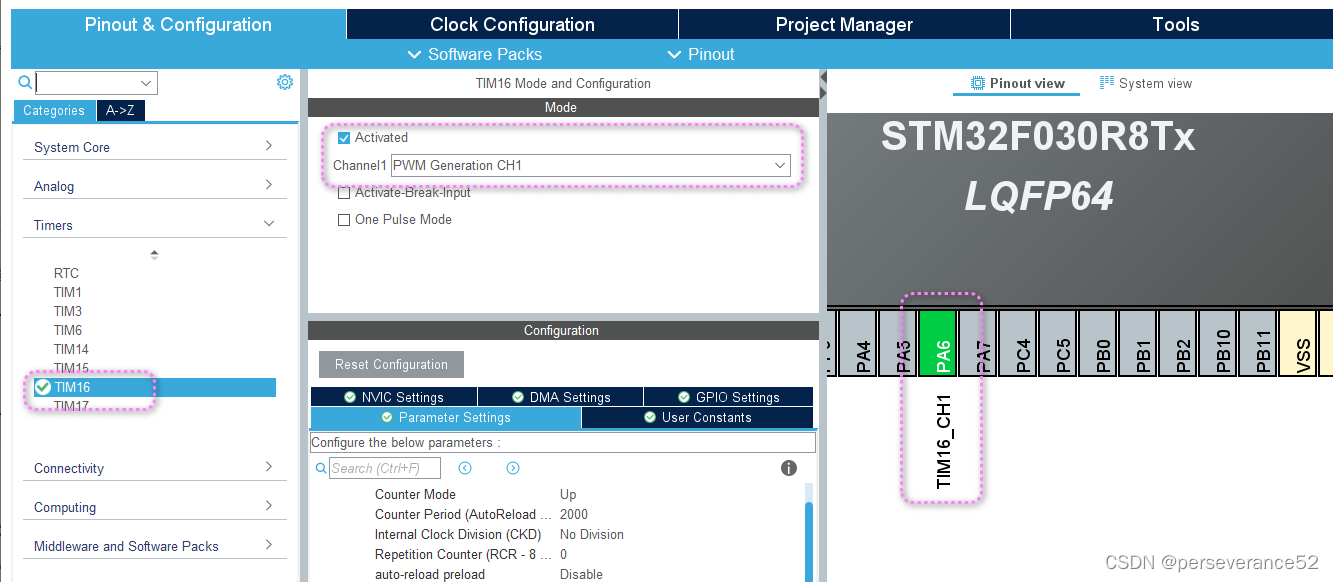
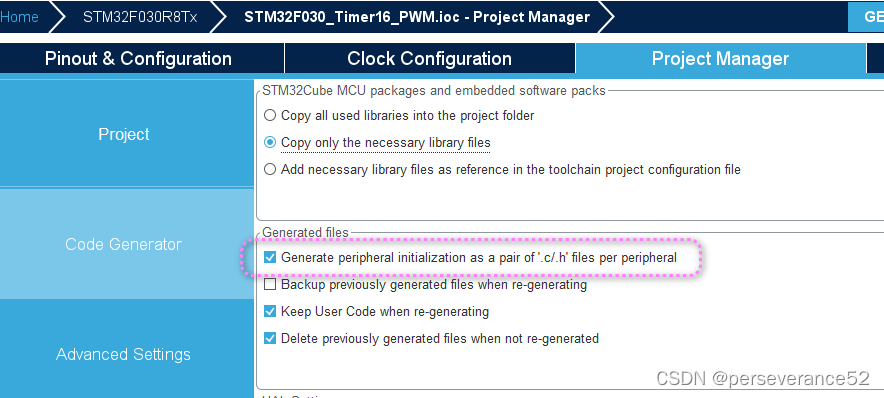
🛠STM32CubeMX配置定时器16 PWM功能选项
-
🔖这里以
STM32F030R8T6为例。 -
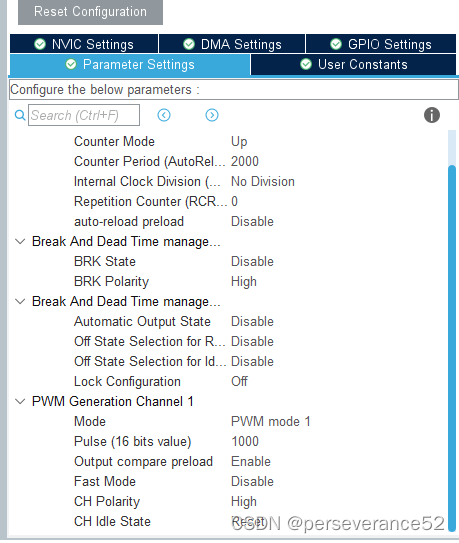
🌿配置定时器16参数,对应PWM功能,主要是使能定时器以及选择通道,其他参数根据需求配置即可。

-
🔧配置好后,生成独立的.c和.h文件
-
🌿找到工程生成文件目录,驱动文件分别在
src和inc文件夹内,拷贝对应的tim.c和tim.h文件到,Air001工程项目中使用。 -
🌿回到Air001工程,将
tim.c添加进来,将头文件路径包含进来,需要修改的地方,主要是调整主时钟频率,对应PWM频率和占空比根据个人需求修改即可。
- 🔧这样一个基本的工程框架就搭建好了。
- 📝main主程序
int main(void) { uint16_t plusewidth = 5000;//脉冲宽度;f=1000 000/5000=200Hz uint16_t plusedelay = 500;//脉宽 /* 初始化所有外设,Flash接口,SysTick */ HAL_Init(); /* 系统时钟配置 */ APP_SystemClockConfig(); MX_GPIO_Init(); MX_TIM16_Init(); __HAL_TIM_SET_AUTORELOAD(&htim16, plusewidth - 1); //调整分频系数,可以改变arr以改变频率 __HAL_TIM_SET_COMPARE(&htim16, TIM_CHANNEL_1, plusedelay); //PWM脉冲宽度,修改占空比比较值 HAL_TIM_PWM_Start(&htim16, TIM_CHANNEL_1); // if(HAL_TIM_PWM_Start(&htim16, TIM_CHANNEL_1) != HAL_OK) // { // Error_Handler(); // } while(1) { } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
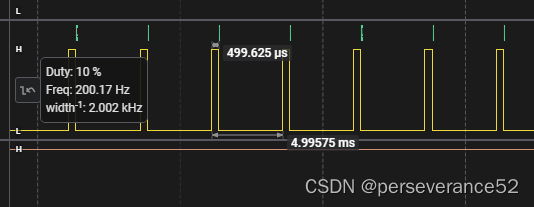
- 🌿PA7引脚PWM信息:
- 📚工程代码
链接:https://pan.baidu.com/s/1FboUjQMLb1pQu2coVDlh3Q 提取码:xqpn- 1
- 2
📓Air001 TIM16通用定时器作延时使用
- 🔖配置工程方法,可以如法炮制。
STM32CubeMX工具,配置定时器相关参数:
- 🌿步骤步骤重复,参考上面的方法导入到Air001工程中即可。
- 🔨在
tim.c中添加如下延时函数内容,并将函数名拷贝到tim.h中。
/* USER CODE BEGIN 1 */ //us级延时函数 //us需要延时的us数 void delay_us(uint16_t us) { uint16_t n; n = us/100;//修正误差值 //设置定时器预分频系数,TIM16时钟为8MHz,分频后时钟为1MHz即1us //不同CPU的时钟可能不一样,PSC的值=定时器时钟/1MHz -1 //8M的定时器设置PSC为8-1 TIM16->PSC = (8 -1); //设置自动重装载值,定时器计数器的值自增到ARR时,会产生更新事件,ARR的值就是需要延时的时间 TIM16->ARR = us - 2*n; //重新初始化定时器计数器并生成寄存器更新事件,确保预分频值被采用,此时定时器将采用刚刚写入的预分频值,如果此处不更新,那么定时器需要等待下次更新事件的到来才会重新加载预分频值 TIM16->EGR |= (1<<0); //清除更新标志位,该位在发生更新事件时通过硬件置 1,但需要通过软件清零 TIM16->SR = 0; //CR1的bit3(OPM)置一,计数器在发生下一更新事件时停止计数,单脉冲模式 TIM16->CR1 |= (1<<3); //CR1的bit0(CEN)置一,启动定时器开始计数 TIM16->CR1 |= (1<<0); //等待更新事件到来,计数器的值自增到自动重装载寄存器的时候,会产生更新事件,此时延时时间已到 while((TIM16->SR & 0x01)==0); //清除更新标志位,该位在发生更新事件时通过硬件置 1,但需要通过软件清零 TIM16->SR &= ~(1<<0); } //ms级延时函数 //最大延时时间 65535ms void delay_ms(uint16_t ms) { //设置定时器预分频系数,TIM16时钟为8MHz,分频后时钟为1KHz即1ms //不同CPU的时钟可能不一样 TIM16->PSC = (8000-1);//8000 000/8000=1KHz //设置自动重装载值,定时器计数器的值自增到ARR时,会产生更新事件,ARR的值就是需要延时的时间的一半 TIM16->ARR = ms; //重新初始化定时器计数器并生成寄存器更新事件,确保预分频值被采用,此时定时器将采用刚刚写入的预分频值,如果此处不更新,那么定时器需要等待下次更新事件的到来才会重新加载预分频值 TIM16->EGR |= (1<<0); //清除更新标志位,该位在发生更新事件时通过硬件置 1,但需要通过软件清零 TIM16->SR = 0; //CR1的bit3(OPM)置一,计数器在发生下一更新事件时停止计数,单脉冲模式 TIM16->CR1 |= (1<<3); //CR1的bit0(CEN)置一,启动定时器开始计数 TIM16->CR1 |= (1<<0); //等待更新事件到来,计数器的值自增到自动重装载寄存器的时候,会产生更新事件,此时延时时间已到 while((TIM16->SR & 0x01)==0); //清除更新标志位,该位在发生更新事件时通过硬件置 1,但需要通过软件清零 TIM16->SR &= ~(1<<0); } /* USER CODE END 1 */- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
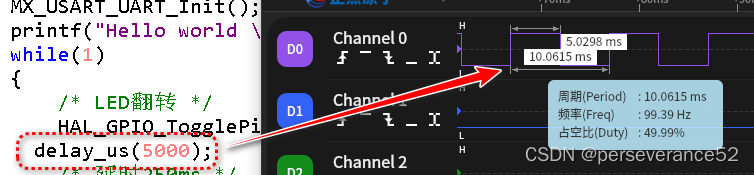
- 📝main函数:
int main(void) { /* 初始化所有外设,Flash接口,SysTick */ HAL_Init(); /* 初始化GPIO */ MX_GPIO_Init(); /* 系统时钟配置 */ APP_SystemClockConfig(); MX_TIM16_Init(); while(1) { /* LED翻转 */ HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_3); delay_us(500); HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_3); delay_ms(250); /* 延时250ms */ HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_3); delay_ms(250); /* 延时250ms */ HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_3); delay_us(500); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 🎞采集的PB3引脚的波形:

- 📚定时器16作延时函数使用工程
链接:https://pan.baidu.com/s/132W6L3jC1196mrcDzrC3qg 提取码:onsu- 1
- 2
✨按照上述方法和实现原理,对于Air001 定时器17,配置相同功能的方法一样,这里不再赘述。
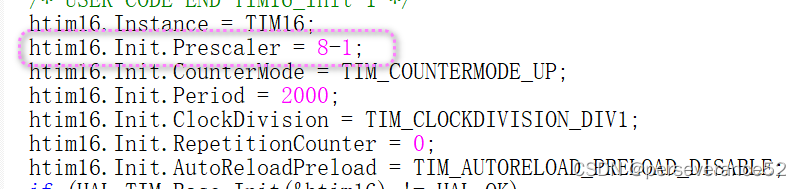
🌼定时器16 微秒延时配置
#define DLY_TIM_Handle (&htim16) TIM_HandleTypeDef htim16; /* TIM16 init function */ void MX_TIM16_Init(void) { /* USER CODE BEGIN TIM16_Init 0 */ /* USER CODE END TIM16_Init 0 */ __HAL_RCC_TIM16_CLK_ENABLE(); /* USER CODE BEGIN TIM16_Init 1 */ /* USER CODE END TIM16_Init 1 */ htim16.Instance = TIM16; htim16.Init.Prescaler = 8 - 1;//配置8MHz时钟主频情况下 htim16.Init.CounterMode = TIM_COUNTERMODE_UP; htim16.Init.Period = 65535; htim16.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; htim16.Init.RepetitionCounter = 0; htim16.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE; if(HAL_TIM_Base_Init(&htim16) != HAL_OK) { Error_Handler(); } /* USER CODE BEGIN TIM16_Init 2 */ /* USER CODE END TIM16_Init 2 */ } void delay_us(uint16_t nus) { __HAL_TIM_SET_COUNTER(DLY_TIM_Handle, 0); __HAL_TIM_ENABLE(DLY_TIM_Handle); while(__HAL_TIM_GET_COUNTER(DLY_TIM_Handle) < nus) { } __HAL_TIM_DISABLE(DLY_TIM_Handle); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
📗利用滴答定时器实现微秒级延时
- 📍参考:https://blog.csdn.net/qq153471503/article/details/102930097
#define CPU_FREQUENCY_MHZ 8 // 时钟主频 void delay_us(__IO uint32_t delay) { int last, curr, val; int temp; while (delay != 0) { temp = delay > 900 ? 900 : delay; last = SysTick->VAL; curr = last - CPU_FREQUENCY_MHZ * temp; if (curr >= 0) { do { val = SysTick->VAL; } while ((val < last) && (val >= curr)); } else { curr += CPU_FREQUENCY_MHZ * 1000; do { val = SysTick->VAL; } while ((val <= last) || (val > curr)); } delay -= temp; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 🔖此文章仅作为个人学习探索知识的总结,不作为他人引用者的理论依据,由于学识所限,难免会出现错误或纰漏,欢迎大家指正。
-
相关阅读:
mediakit 源码 轻微微 学习总结
Python实现猎人猎物优化算法(HPO)优化卷积神经网络回归模型(CNN回归算法)项目实战
python reportlab 生成多页pdf
Pytorch图像模型转ONNX后出现色偏问题
多线程高并发笔记
开机启动应用
SAP ADM100-1.2之系统登录过程(ABAP)
【树莓派4B】如何点亮树莓派的LED灯
Zookeeper安装
GoLang核心知识点
- 原文地址:https://blog.csdn.net/weixin_42880082/article/details/133799560