-
codesys 6轴机器人正解程序
——————————————————————————————————————
标准DH方法
——————————————————————————————————————
- FUNCTION FUN_standard_DH_method : ARRAY[0..3,0..3] OF LREAL
- VAR_INPUT
- theta:LREAL;
- d:LREAL;
- a:LREAL;
- alpha:LREAL;
- END_VAR
- VAR
- END_VAR
- FUN_standard_DH_method[0,0]:=COS(theta);
- FUN_standard_DH_method[0,1]:=-SIN(theta) * COS(alpha);
- FUN_standard_DH_method[0,2]:=SIN(theta) * SIN(alpha);
- FUN_standard_DH_method[0,3]:=a * COS(theta);
- FUN_standard_DH_method[1,0]:=SIN(theta);
- FUN_standard_DH_method[1,1]:=COS(theta) * COS(alpha);
- FUN_standard_DH_method[1,2]:=-COS(theta) * SIN(alpha);
- FUN_standard_DH_method[1,3]:=a * SIN(theta);
- FUN_standard_DH_method[2,0]:=0;
- FUN_standard_DH_method[2,1]:=SIN(alpha);
- FUN_standard_DH_method[2,2]:=COS(alpha);
- FUN_standard_DH_method[2,3]:=d;
- FUN_standard_DH_method[3,0]:=0;
- FUN_standard_DH_method[3,1]:=0;
- FUN_standard_DH_method[3,2]:=0;
- FUN_standard_DH_method[3,3]:=1;
——————————————————————————————————————
——————————————————————————————————————
- FUNCTION FUN_matrix_44_MUL : ARRAY[0..3,0..3] OF LREAL
- VAR_INPUT
- matrix1:ARRAY[0..3,0..3] OF LREAL;
- matrix2:ARRAY[0..3,0..3] OF LREAL;
- END_VAR
- VAR
- i:INT;
- j:INT;
- END_VAR
- FOR i:=0 TO 3 BY 1 DO
- FOR j:=0 TO 3 BY 1 DO
- FUN_matrix_44_MUL[i,j]:=matrix1[i,0] * matrix2[0,j] +
- matrix1[i,1] * matrix2[1,j] +
- matrix1[i,2] * matrix2[2,j] +
- matrix1[i,3] * matrix2[3,j];
- END_FOR
- END_FOR
——————————————————————————————————————
旋转矩阵变换RPY角
——————————————————————————————————————
- FUNCTION FUN_matrix_33_to_RPY : BOOL
- VAR_INPUT
- matrix:ARRAY[0..3,0..3] OF LREAL;
- END_VAR
- VAR_IN_OUT
- alpha:LREAL;
- bata:LREAL;
- gama:LREAL;
- END_VAR
- VAR
- END_VAR
- bata:=SM3M.SMC_atan2(SQRT(EXPT(matrix[2,0],2) + EXPT(matrix[2,1],2)), matrix[2,2]);
- alpha:=SM3M.SMC_atan2(matrix[1,2] / SIN(bata), matrix[0,2] / SIN(bata));
- gama:=SM3M.SMC_atan2(matrix[2,1] / SIN(bata), -matrix[2,0] / SIN(bata));
——————————————————————————————————————
程序
——————————————————————————————————————
- VAR_GLOBAL
- theta:ARRAY[1..6] OF LREAL;
- d:ARRAY[1..6] OF LREAL;
- a:ARRAY[1..6] OF LREAL;
- alpha:ARRAY[1..6] OF LREAL;
- offset:ARRAY[1..6] OF LREAL;
- matrix:ARRAY [1..6] OF ARRAY [0..3,0..3] OF LREAL;
- endMatrix:ARRAY [0..3,0..3] OF LREAL;
- END_VAR
- PROGRAM PLC_PRG
- VAR
- i:INT;
- x:LREAL;
- y:LREAL;
- z:LREAL;
- rx:LREAL;
- ry:LREAL;
- rz:LREAL;
- END_VAR
- P_axisGroup();
- theta[1]:=0+SM_Drive_Virtual_1.fActPosition/180*SM3M.SMC_PI;
- theta[2]:=SM3M.SMC_PI/2+SM_Drive_Virtual_2.fActPosition/180*SM3M.SMC_PI;
- theta[3]:=0+SM_Drive_Virtual_3.fActPosition/180*SM3M.SMC_PI;
- theta[4]:=0+SM_Drive_Virtual_4.fActPosition/180*SM3M.SMC_PI;
- theta[5]:=0+SM_Drive_Virtual_5.fActPosition/180*SM3M.SMC_PI;
- theta[6]:=0+SM_Drive_Virtual_6.fActPosition/180*SM3M.SMC_PI;
- alpha[1]:=SM3M.SMC_PI/2;
- alpha[2]:=0;
- alpha[3]:=SM3M.SMC_PI/2;
- alpha[4]:=SM3M.SMC_PI/2;
- alpha[5]:=-SM3M.SMC_PI/2;
- alpha[6]:=0;
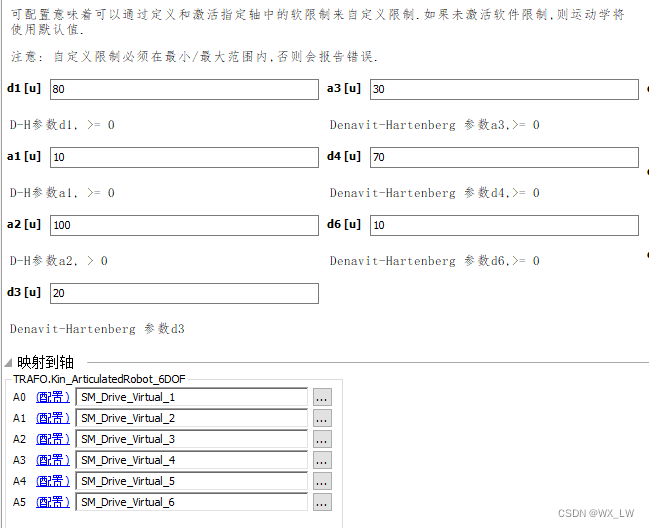
- d[1]:=80;
- d[2]:=0;
- d[3]:=20;
- d[4]:=70;
- d[5]:=0;
- d[6]:=10;
- a[1]:=10;
- a[2]:=100;
- a[3]:=30;
- a[4]:=0;
- a[5]:=0;
- a[6]:=0;
- FOR i:=1 TO 6 BY 1 DO
- matrix[i]:=FUN_standard_DH_method(theta:=theta[i] ,d:=d[i] ,a:=a[i] ,alpha:=alpha[i]);
- END_FOR
- endMatrix:=matrix[1];
- FOR i:=2 TO 6 BY 1 DO
- endMatrix:=FUN_matrix_44_MUL(endMatrix,matrix[i]);
- END_FOR
- x:=endMatrix[0,3];
- y:=endMatrix[1,3];
- z:=endMatrix[2,3];
- FUN_matrix_33_to_RPY(matrix:=endMatrix , alpha:=rx , bata:=ry , gama:=rz );
- rx:=rx/SM3M.SMC_PI*180;
- ry:=ry/SM3M.SMC_PI*180;
- rz:=rz/SM3M.SMC_PI*180;
——————————————————————————————————————
机器人轴组程序查看之前的文章
——————————————————————————————————————

-
相关阅读:
Redis-应用问题(缓存穿透/缓存击穿/缓存雪崩/分布式锁)
[附源码]计算机毕业设计springboot农村人居环境治理监管系统
2流高手速成记(之八):基于Sentinel实现微服务体系下的限流与熔断
EO.Total:EO.WebBrowser 2023.3.31.0 Crack
Python趣味算法入门 - 牛顿迭代法求方程根
Linux 命令【8】:ssm
【Python3】【力扣题】268. 丢失的数字
基于机器视觉的移动消防机器人(一)--功能设计
dolphinscheduler docker compose安装配置
stripe支付-关于微信小程序
- 原文地址:https://blog.csdn.net/weixin_58619062/article/details/133810412
