-
课题学习(六)----安装误差校准、实验方法
一、 安装误差校准
1.1 数学模型
在实际情况下,即使努力尝试使三轴加速度计和三轴磁通门正交,也不可能保证坐标轴的正交和安装的准确居中。无论采用何种解法,都会导致最终解的误差。因此,要想提高测量精度,就必须开发一种补偿算法,使传感器居中且相互正交,即从系统的数学模型出发,设计相应的算法求解出安装误差,并准确计算出钻柱姿态。
由于安装误差不可避免,需要通过实验室实验获得校准参数,因此我们尝试建立误差补偿的算法模型。首先,假设在建立数学模型之前,Ax、Ay、Az为加速度计的输出电压,则重力各分量与输出电压的关系如下式所示:

K i x , K i y , K i z K_{ix},K_{iy},K_{iz} Kix,Kiy,Kiz表示三轴加速度校准系数。
我们假设 I A x , I A y , I A z I_{Ax},I_{Ay},I_{Az} IAx,IAy,IAz和 T A x , T A y , T A z T_{Ax},T_{Ay},T_{Az} TAx,TAy,TAz表示三轴加速度计安装角和相位的安装角,可以得到下式:
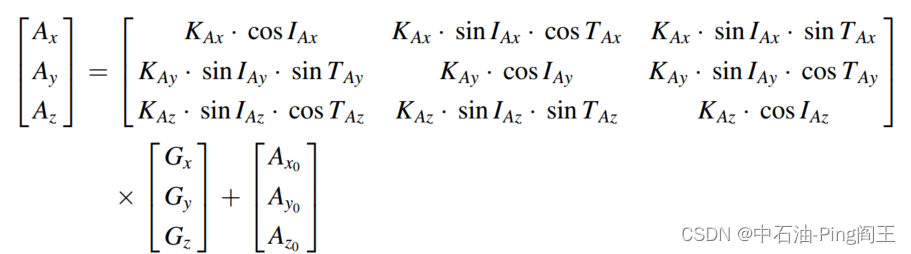
对比上面两式,可以很容易的得到 K x x = K A x ⋅ c o s I A x , . . . , K z z = K A z ⋅ c o s I A z K_{xx}=K_{Ax}·cosI_{Ax},...,K_{zz}=K_{Az}·cosI_{Az} Kxx=KAx⋅cosIAx,...,Kzz=KAz⋅cosIAz
由此,我们可以计算出加速度计的校准系数为和传感器偏差:


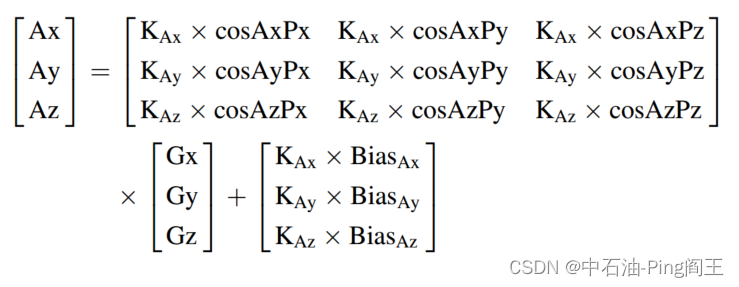
对于安装在x轴上的加速度计,定义 c o s ( A x P x ) 、 c o s ( A x P y ) cos(AxPx)、cos(AxPy) cos(AxPx)、cos(AxPy)和 c o s ( A x P z ) cos(AxPz) cos(AxPz)为加速度计敏感轴与仪器坐标系三轴夹角的余弦值:
然后给出加速度计误差标定的数学模型:
同理,得到磁通门误差标定数学模型如式
然后在算法中使用校准参数 K A i , B i a s A i , c o s ( A i P j ) , L F i , B i a s F i , c o s ( F i P j ) L F x K_{Ai},Bias_{Ai},cos(A_iP_j),L_{Fi},Bias_{Fi},cos(F_iP_j)L_{Fx} KAi,BiasAi,cos(AiPj),LFi,BiasFi,cos(FiPj)LFx,其中, i = x , y , z , j = x , y , z i=x,y,z,j=x,y,z i=x,y,z,j=x,y,z,带入算法之后便可以得到校准之后的值。1.2实验方法
设计可放置在三维空间任意位置的实验仪器,并采用非磁性材料,保证磁通门传感器不受干扰。
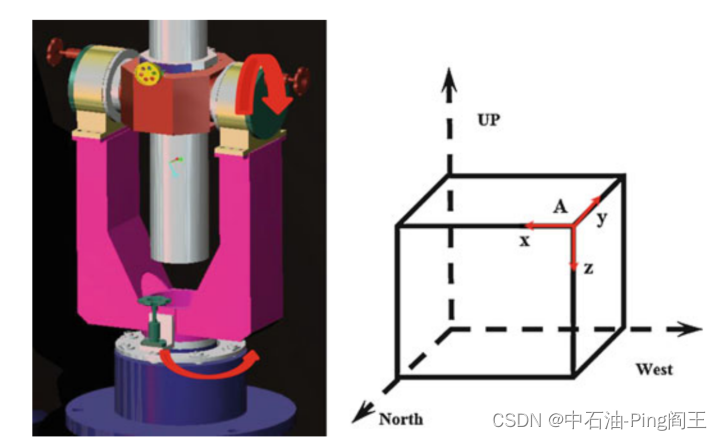
首先采用正交法标定安装误差。确定下表所示的24个位置,计算每个点的倾角和方位角值即可得到校正参数。如上图右侧所示,A点代表表1中的数字2。

以Ax为例,由加速度计误差标定的数学模型可得公式如下: K A x × c o s A x P x × G x = 1 8 ( A x 1 + A x 5 + A x 18 + A x 24 − A x 3 − A x 7 − A x 20 − A 22 ) . . . K_{Ax}×cosA_xP_x×G_x = \frac{1}{8}(A_{x1}+A_{x5}+A_{x18}+A_{x24}-A_{x3}-A_{x7}-A_{x20}-A_{22})... KAx×cosAxPx×Gx=81(Ax1+Ax5+Ax18+Ax24−Ax3−Ax7−Ax20−A22)...
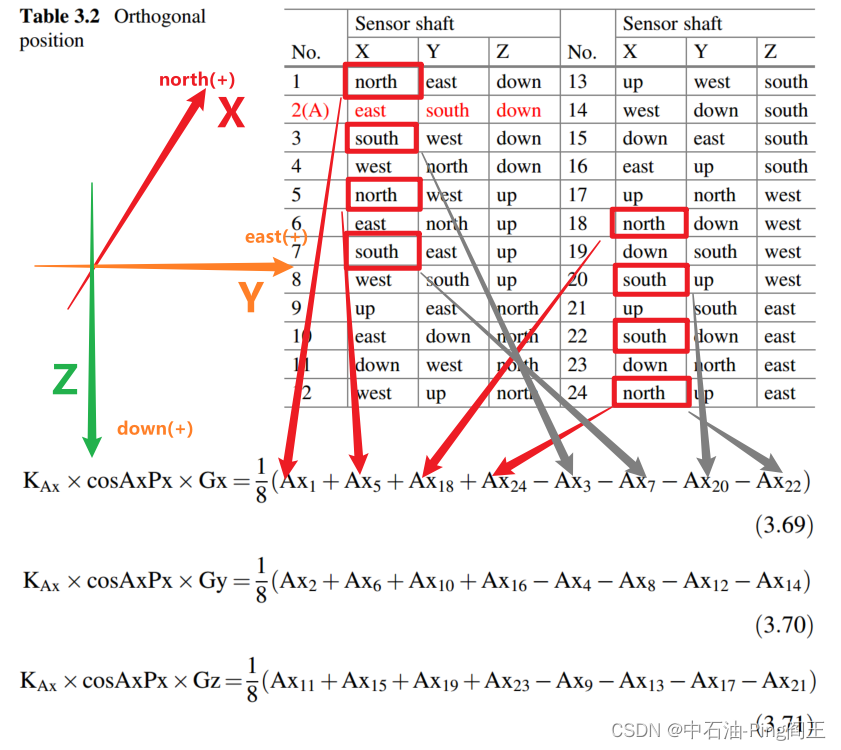
注意,上式中有一些错误:


上图中, G h c = G ⋅ c o s A x P x , G h s = G ⋅ c o s A x P y , G v = G ⋅ c o s A x P z G_{hc}=G·cosA_xP_x,G_{hs}=G·cosA_xP_y,G_{v}=G·cosA_xP_z Ghc=G⋅cosAxPx,Ghs=G⋅cosAxPy,Gv=G⋅cosAxPz(个人推测,原论文中作者并未说明,但是可以倒推出来)。
但采用正交法标定系统所需仪器不仅精度高,而且结构复杂。由于实际应用比较困难,我们提出了数据拟合的方法。具体步骤如下:
将仪器固定在一个位置(固定井斜和方位),旋转360°。仪器旋转45°(误差:±1°)采样一次数据,仪器旋转360°将采样8次数据。利用基于正交三角函数的数值拟合理论,可以得到仪器旋转360°时的传感器输出电压曲线。然后计算每个传感器的标定系数。
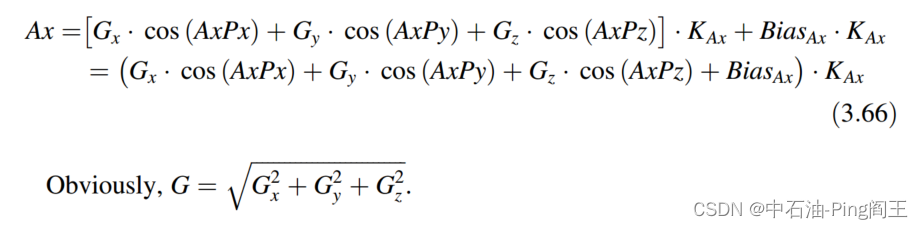
以Ax和Fx为例介绍了计算方法: A x = ( G x ⋅ c o s A x P x + G y ⋅ c o s A x P y + G z ⋅ c o s A x P z + B i a s A x ) K A x A_x = (G_x·cosA_xP_x+G_y·cosA_xP_y+G_z·cosA_xP_z+Bias_{Ax})K_{Ax} Ax=(Gx⋅cosAxPx+Gy⋅cosAxPy+Gz⋅cosAxPz+BiasAx)KAx
F x = ( B x ⋅ c o s A x P x + B y ⋅ c o s A x P y + B z ⋅ c o s A x P z + B i a s A x ) L F x F_x = (B_x·cosA_xP_x+B_y·cosA_xP_y+B_z·cosA_xP_z+Bias_{Ax})L_{Fx} Fx=(Bx⋅cosAxPx+By⋅cosAxPy+Bz⋅cosAxPz+BiasAx)LFx
然后: A x = K A x ⋅ G ⋅ s i n I ⋅ c o s A x P x ⋅ c o s T − K A x ⋅ G ⋅ s i n I ⋅ c o s A x P y ⋅ s i n T + K A x ⋅ ( − G ⋅ c o s I ⋅ c o s A x P z + B i a s A x ) A_x =K_{Ax} ·G·sinI·cosA_xP_x·cosT-K_{Ax} ·G·sinI·cosA_xP_y·sinT+K_{Ax} ·(-G·cosI·cosA_xP_z+Bias_{Ax}) Ax=KAx⋅G⋅sinI⋅cosAxPx⋅cosT−KAx⋅G⋅sinI⋅cosAxPy⋅sinT+KAx⋅(−G⋅cosI⋅cosAxPz+BiasAx)
假设如下:
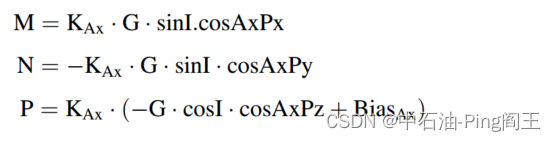
加入倾角不变,则M,N,P均为常数,带入下式
A x = M ⋅ c o s r + N ⋅ s i n r + P A_x = M·cosr+N·sinr+P Ax=M⋅cosr+N⋅sinr+P
F x = m ⋅ c o s r + n ⋅ s i n r + p F_x = m·cosr+n·sinr+p Fx=m⋅cosr+n⋅sinr+p
上面两式就是加速度计和磁通门的输出数学模型,其中,
为了达到更高的拟合精度,选择正交三角函数作为基本函数来拟合各传感器的输出曲线。还是 A x A_x Ax为例,假设 A m = α 0 , I = d 1 , A x A_m=\alpha_0,I=d_1,A_x Am=α0,I=d1,Ax的输出为: A x 1 = M 1 ⋅ c o s r + N 1 ⋅ s i n r + P 1 A_{x1} = M_1·cosr+N_1·sinr+P_1 Ax1=M1⋅cosr+N1⋅sinr+P1
假设 A m = α 0 , I = d 2 = d 1 + 90 ° , A x A_m=\alpha_0,I=d_2=d_1+90°,A_x Am=α0,I=d2=d1+90°,Ax的输出为: A x 2 = M 2 ⋅ c o s r + N 2 ⋅ s i n r + P 2 A_{x2} = M_2·cosr+N_2·sinr+P_2 Ax2=M2⋅cosr+N2⋅sinr+P2
然后,
按照下面公式便可计算:

磁通门计算公式与上面相似。1.3 校准之后的效果
采用正交法和数值拟合定标法分别计算定标系数。比较所得结果如下表。
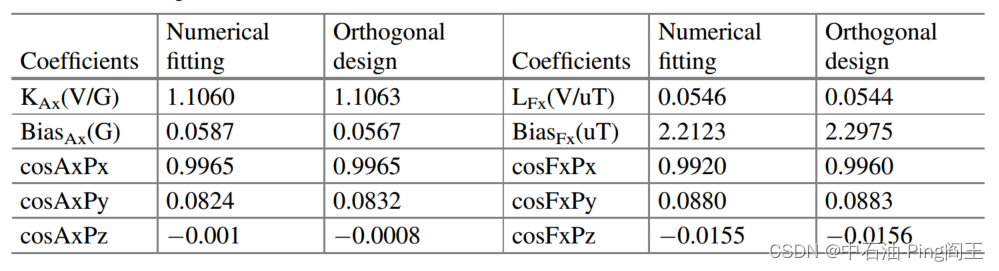
两种定标方法在计算系数方面差异不大。利用这些系数计算井眼倾角和方位角如下图所示。
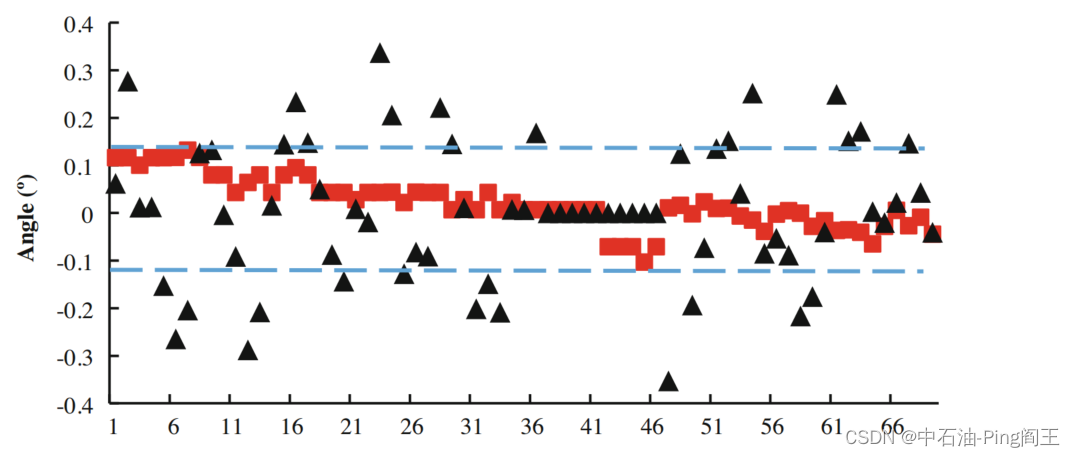
红色代表倾角的误差,黑色代表方位角的误差r。
1. 在旋转导向系统中,必须建立一个配备三轴磁通门和三轴加速度计的测量系统,但安装误差不可避免,必须进行校准。
2. 建立了能很好地满足现场应用要求的标定模型。倾角和方位角的最终测量误差很小。
3.正交法与曲线拟合法在计算标定系数上差别不大,但曲线拟合法操作简便,标定仪器结构简单,即使标定仪器的精度比以前低,也可以像正交法一样得到非常精确的计算系数,更适合工程应用。二、往期回顾
课题学习(一)----静态测量
课题学习(二)----倾角和方位角的动态测量方法(基于磁场的测量系统)
课题学习(三)----倾角和方位角的动态测量方法(基于陀螺仪的测量系统)
课题学习(四)----四元数解法
课题学习(五)----阅读论文《抗差自适应滤波的导向钻具动态姿态测量方法》 -
相关阅读:
Pandas数据分析:处理文本数据(str/object)各类操作+代码一文详解(二)
刷题记录:牛客NC19909[CQOI2007]涂色PAINT
Python 绘制玫瑰花
【总结】ui自动化selenium知识点总结
python T检验
操作符知识你会了,那表达式求值呢?
Python中的Apriori关联算法-市场购物篮分析
mysql DBA常用的sql
FPGA学习笔记(十三)负数运算
G. Columns Swaps(并查集)
- 原文地址:https://blog.csdn.net/weixin_44412311/article/details/133787105