-
Arduino程序设计(十四)舵机控制实验(SG90)
前言
- 本文介绍SG90舵机控制原理及实验,主要内容有:
- 1、介绍SG90舵机;
- 2、舵机0°~180°来回转动;
- 3、串口控制舵机转动固定角度。
一、SG90舵机

1、SG90舵机简介
-
(1)舵机是一种位置(角度)伺服的驱动器。舵机只是一种通俗的叫法,其实质是一个伺服马达。在需要角度不断变化并可以保持的控制系统中应用广泛。如遥控机械人、飞机模型等。
-
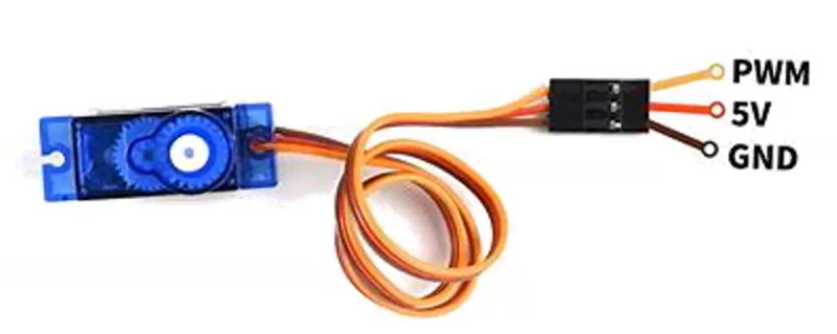
(2)舵机的转动角度为0~180°,其内部结构包括电机,控制电路和机械结构三部分。电机有三根线引出,分别接VCC、GNG和信号线。
-
(3)舵机引出线的格式:棕、红、橙(棕色连接GND、红色连接VCC、橙色连接信号)。
-
(4)参数介绍

-
(5)舵机原理

-
(6)舵机控制原理


2、硬件电路连线
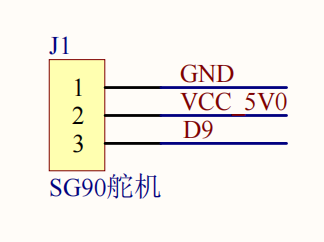
Arduino开发板引脚 SG90舵机 功能 GND GND(棕色) 负极 5V VCC(红色) 正极 D9 PWM(橙色) 信号输入 3、Servo库常用函数
Servo库函数 说明 语法 参数 servo.attach() 设置Arduino舵机的引脚连接 servo.attach(pin) pin:连接舵机数据线的Arduino引脚号 servo.write() 控制舵机旋转;对于标准180°舵机,write()函数会将舵机轴旋转到相应的角度位置。 servo.write(angle) angle:旋转角度数值;对于标准180°舵机,angle范围为0~180 二、舵机实验
1、舵机0°~180°来回转动
-
(1)本实验采用Arduino UNO R3开发板及自主搭建电路的方式,实现预设功能。
-
(2)舵机0°~180°来回转动的电路图,如下图所示:
-
(3)实现功能:舵机0~180°来回转动。
-
(4)注意:编译代码前,需要下载安装 Servo 库文件,并在程序中添加 #include
头文件 。
代码实现:
//SG90舵机控制 //舵机0~180°来回转动 #include//加载文件库 int pos = 0; int SG90 = 9; Servo myservo; void setup() { myservo.attach(SG90, 500, 2500); //修正脉冲宽度 } void loop() { for (pos = 0; pos <= 180; pos += 1) { //pos+=1等价于pos=pos+1 myservo.write(pos); delay(15); } for (pos = 180; pos >= 0; pos -= 1) { myservo.write(pos); delay(15); } } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- (5)实现现象(部分显示):

2、串口控制舵机转动固定角度
-
(1)本实验采用Arduino UNO R3开发板及自主搭建电路的方式,实现预设功能。
-
(2)串口控制舵机转动固定角度的电路图,如下图所示:

-
(3)实现功能:
-
① 串口输入0,led0、led1、led2熄灭,舵机转动到0°,同时串口打印 “ 舵机转动到0° ” ;
-
② 串口输入1,led0、led1熄灭,led2点亮,舵机转动到30°,同时串口打印 “ 舵机转动到30° ” ;
-
③ 串口输入2,led0、led2熄灭,led1点亮,舵机转动到60°,同时串口打印 “ 舵机转动到60° ” ;
-
④ 串口输入3,led1、led2点亮,led0熄灭,舵机转动到90°,同时串口打印 “ 舵机转动到90° ” ;
-
⑤ 串口输入4,led1、led2熄灭,led0点亮,舵机转动到120°,同时串口打印 “ 舵机转动到120° ” ;
-
⑥ 串口输入5,led0、led2点亮,led1熄灭,舵机转动到150°,同时串口打印 “ 舵机转动到150° ” ;
-
⑦ 串口输入6,led0、led1点亮,led2熄灭,舵机转动到180°,同时串口打印 “ 舵机转动到180° ” 。
代码实现:
//SG90舵机控制 /*实验现象: ① 串口输入0,led0、led1、led2熄灭,舵机转动到0°,同时串口打印“舵机转动到0°”; ② 串口输入1,led0、led1熄灭,led2点亮,舵机转动到30°,同时串口打印“舵机转动到30°”; ③ 串口输入2,led0、led2熄灭,led1点亮,舵机转动到60°,同时串口打印“舵机转动到60°”; ④ 串口输入3,led1、led2点亮,led0熄灭,舵机转动到90°,同时串口打印“舵机转动到90°”; ⑤ 串口输入4,led1、led2熄灭,led0点亮,舵机转动到120°,同时串口打印“舵机转动到120°”; ⑥ 串口输入5,led0、led2点亮,led1熄灭,舵机转动到150°,同时串口打印“舵机转动到150°”; ⑦ 串口输入6,led0、led1点亮,led2熄灭,舵机转动到180°,同时串口打印“舵机转动到180°”。 */ #includeint led0 = 5; int led1 = 6; int led2 = 7; int SG90 = 9; Servo myservo; //创建舵机对象 void setup() { myservo.attach(SG90, 500, 2500); pinMode(led0, OUTPUT); pinMode(led1, OUTPUT); pinMode(led2, OUTPUT); Serial.begin(9600); } void loop() { if (Serial.available() > 0) { char c = Serial.read(); if (c == '0') { digitalWrite(led0, LOW); digitalWrite(led1, LOW); digitalWrite(led2, LOW); myservo.write(0); Serial.println("舵机转动到0°"); } else if (c == '1') { digitalWrite(led0, LOW); digitalWrite(led1, LOW); digitalWrite(led2, HIGH); myservo.write(30); Serial.println("舵机转动到30°"); } else if (c == '2') { digitalWrite(led0, LOW); digitalWrite(led1, HIGH); digitalWrite(led2, LOW); myservo.write(60); Serial.println("舵机转动到60°"); } else if (c == '3') { digitalWrite(led0, LOW); digitalWrite(led1, HIGH); digitalWrite(led2, HIGH); myservo.write(90); Serial.println("舵机转动到90°"); } else if (c == '4') { digitalWrite(led0, HIGH); digitalWrite(led1, LOW); digitalWrite(led2, LOW); myservo.write(120); Serial.println("舵机转动到120°"); } else if (c == '5') { digitalWrite(led0, HIGH); digitalWrite(led1, LOW); digitalWrite(led2, HIGH); myservo.write(150); Serial.println("舵机转动到150°"); } else if (c == '6') { digitalWrite(led0, HIGH); digitalWrite(led1, HIGH); digitalWrite(led2, LOW); myservo.write(180); Serial.println("舵机转动到180°"); } } } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- (4)实现现象(部分显示):
- ① 串口输入0,led0、led1、led2熄灭,舵机转动到0°,同时串口打印 “ 舵机转动到0° ” ;

- ② 串口输入3,led1、led2点亮,led0熄灭,舵机转动到90°,同时串口打印 “ 舵机转动到90° ” ;

- ③ 串口输入6,led0、led1点亮,led2熄灭,舵机转动到180°,同时串口打印 “ 舵机转动到180° ” 。

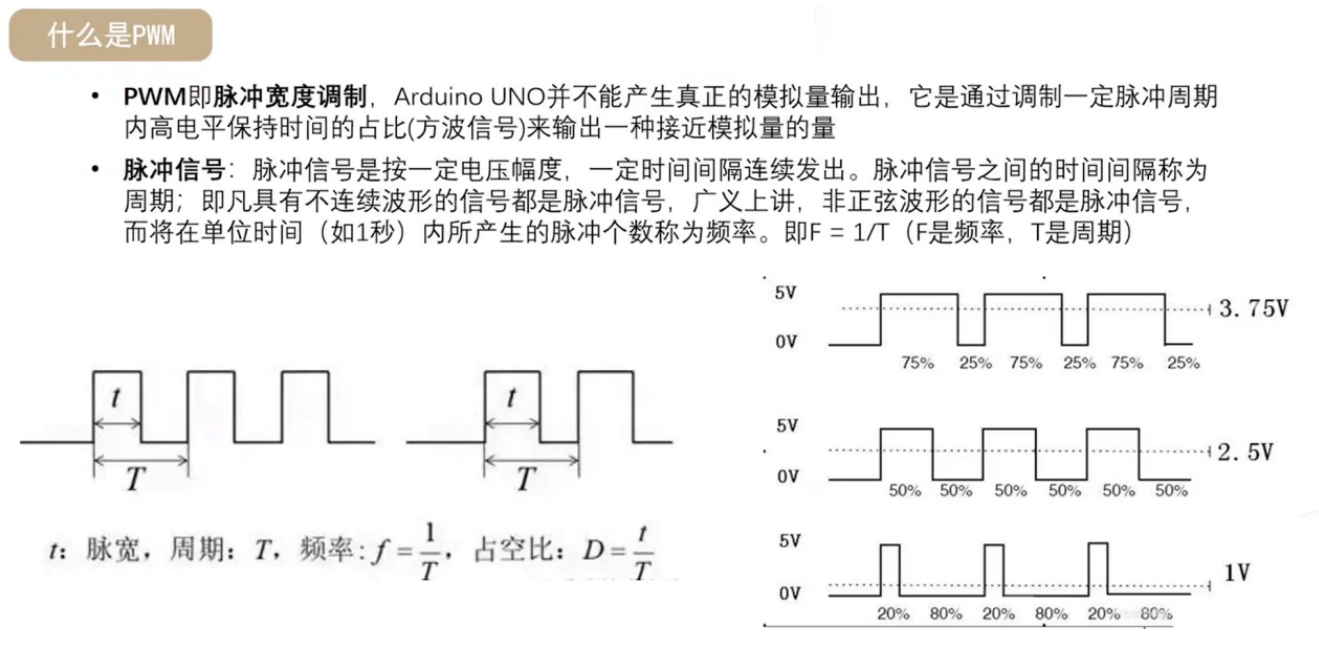
- 拓展:PWM信号简介
总结
- 本文主要介绍SG90舵机的工作原理及两个舵机控制实验,通过上述学习,掌握使用Arduino库函数Servo控制舵机转动到指定角度,实现预设功能。
参考资料1: Arduino教程三—舵机
参考资料2: Arduino控制舵机详解(含代码)
参考资料3: arduino进阶之舵机使用 -
相关阅读:
【uniapp】开发app运行到手机预览(运行到安卓app基座)
SpringBoot面试题3:Spring Boot 的核心注解是哪个?它主要由哪几个注解组成的?
LeetCode·每日一题·1582.二进制矩阵中的特殊位置·模拟
73.矩阵置零
【论文精读】A Survey on Deep Learning for Named Entity Recognition
vue内置组件:keep-alive
Pikachu靶场——SSRF 服务端请求伪造
软著申请模板
equals方法与hashCode方法相关
css属性clip-path的使用说明
- 原文地址:https://blog.csdn.net/weixin_44887565/article/details/133754246
