-
camera bringup介绍
目录
camera bringup需要做什么
让camera相关的硬件正常工作(供电正常,通信正常,硬件设置正常,软件运行正常)。
camera硬件包括
- sensor - camera的核心器件,用来生成图像
- eeprom - 存储校准参数
- actuator - 推动镜头完成对焦
- ois - 光学防抖组件
- flash - 闪光灯
- tof - 激光测距,提升对焦速度
其中,camera sensor是核心器件,是必不可少的。其他器件根据模组的不同是可选择的。
camera硬件连接关系

- CCI总线、MIPI总线、I2C总线都是挂在SOC上的。其中,CMOS sensor、actuator、OIS、EEPROM、外挂LED驱动IC 都是通过 CCI总线挂载到SOC上的。
- 平台接受的数据通过 cmos sensor 通过 MIPI总线进入到 SOC,然后进入到 ISP进行图像处理。
- 有一些项目有 TOF,是通过 I2C总线挂载到 ADSP上。
- 手机上的LED灯,绝大部分都是挂载到 PMIC上的,PMIC是高通的电源管理芯片。
camera使用的通信接口
I2C总线:是由Philips公司开发的一种简单、双向二线制同步串行总线。
I2C地址: 每个slave都有一个7位地址,最后一位补0代表写,补1代表读
I2C速率: 我们目前使用的三种速率 100kbit/s, 400kbit/s, 1Mbit/s

MIPI联盟:即移动产业处理器接口(Mobile Industry Processor Interface 简称MIPI)联盟。MIPI(移动产业处理器接口)是MIPI联盟发起的为移动应用处理器制定的开放标准和一个规范。
目前有两套mipi协议
The C-PHY is based on 3-Phase symbol encoding technology delivering 2.28 bits per symbol over three-wire trios, and is targeting 2.5Gsymbols/s.比较新的协议,传输速率高,目前项目中的主摄像头大多支持C-phy,F1的主摄,F4,J1,J2的主摄使用的都是C-phy。
D-PHY的最初版本的设计目标是500Mbits/s,而D是罗马数字(拉丁文数字)中500。D-PHY采用1对源同步的差分时钟和1~4对差分数据线来进行数据传输。比较旧一点的sensor采用的是 D-PHY,最新的 sensor采用的是 C-PHY。
camera sensor
camera sensor的作用是把光转换成电信号 如下图所示,光子进入光电二极管激发出电子 不同数量的光子积累的电荷不同,我们就可以 通过积累的电荷来反映光强度的不同。


cmos sensor
图像传感器按照工艺可以分为
CCD:是电荷耦合器件(charge coupled device)的简称。它能够将光线变为电荷并将电荷存储及转移,也可将存储之电荷取出使电压发生变化。
CMOS:是Complementary Metal Oxide Semiconductor(互补金属氧化物半导体)的缩写。目前我们在手机上使用的camera sensor都是采用cmos。

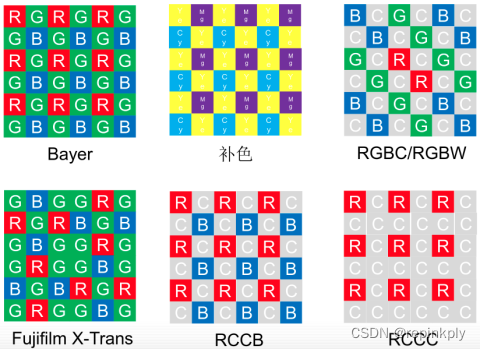
色彩滤镜


sensor输出的分辨率
目前我们常用的主摄camera包括如下分辨率
- Fullsize - 例如48M, 64M, 108M
- Binning size@30fps - 例如12M, 16M, 27M
- 4K@60fps
- 1080p@120fps
- 1080p@240fps
sensor如何得到要输出的各种分辨率?
- binning
- crop (analog crop, digital crop, output crop)
两种方式的差别?
- binning只能是整数倍,crop相对要更灵活
- crop会导致视角(fov)变小,binning不会,但是binning会导致感光度变化

曝光控制-快门
手机使用的摄像头都是电子快门,又可以细分为两种
- rolling shutter
- global shutter

曝光控制-曝光时间
曝光时间如何控制
sensor有专门的寄存器用来控制曝光时间,写入的寄存器值我们一般称为linecount,linecount的单位为Tline,曝光时间可以通过如下的公式计算出来:
vt clock = lineLengthPixelClock x frameLenthlines x frameRate
虽然vt clock可以用过上述公式计算,实际上vt clock在sensor工作时是一个定值
Tline = lineLengthPixelClock / vt clock (一般来说Tline大概在10us这个量级)
曝光时间 = Tline x linecount
软件控制曝光的时候,实际上是这样计算linecount的
linecount = 曝光时间 / Tline
一般的linecount寄存器为16bit,那么最大的曝光时间约等于多少?
曝光控制-帧率
sensor也同样提供了控制帧率的寄存器,寄存器值一般称为frame length lines,正是上面我们计算Tline使用的值。
vt clock = lineLengthPixelClock x frameLenthlines x frameRate
通过这个公式可以推出
frameRate = vt clock / (lineLengthPixelClock x frameLenthlines)
frameLengthLines还需要满足一个如下的额外的条件,其中vertialOffset和具体sensor关
frameLengthLines > linecount + vertialOffset
曝光控制-增益
sensor可以提供两个增益
模拟增益 - analog gain
数字增益 - digital gain
平台的ISP还提供了ISP gain
gain的总和 = analog gain x digital gain x isp gain
由于曝光时间和增益对图像亮度的影响都是线性(几乎)的,那么如果有两组曝光时间和增益的乘积相同,即:
linecount_A x gain_A = linecount_B x gain_B
那么这两组曝光参数对应的图片亮度也是一样的

手动曝光
手动设置曝光-长曝光
目前我们最新的项目,长曝光都支持到了32s,但是曝光寄存器只有16位,一般情况下Tline是10us,最长曝光只有655.32ms,超出的范围怎么实现?
超出此范围的曝光时间都需要sensor硬件支持,目前支持长曝光的sensor都有一个shift寄存器,可以把Tline的时间成倍的提高
Tline_new = Tline x 2^shift (大部分sensor的shift都可以到7)
手动设置感光度
- ISO speed表示sensor的感光度,ISO越大,sensor感光的能力就越强
- ISO100 gain的取值,对应sensor的N倍gain,是由tuning决定的
- sensor支持的最小增益 gain_min,sensor支持的最大增益gain_max,ISO speed的范围[gain_min / ISO100_gain, gain_max / ISO100_gain]
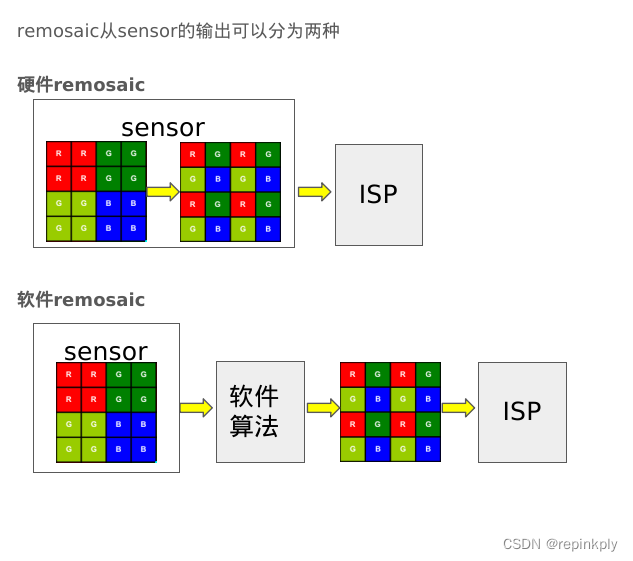
remosaic
- remosaic功能需要sensor的硬件支持,支持remosaic功能的sensor采用了Quad CFA的排列。
- 采用Quad CFA排列的sensor通常分辨率非常高,我们常见的有48M,64M, 108M。
- 普通模式我们使用binning size输出,保证画质。当需要高分辨率图像时,sensor切换到remosaic模式,即为我们手机上的48M,64M,108M等模式。

PDAF
PDAF简介_pdaf类型_repinkply的博客-CSDN博客
actuator
是一颗控制VCM马达的驱动IC,软件通过I2C写入DAC code来控制马达的位置
从控制方式上可以分为:
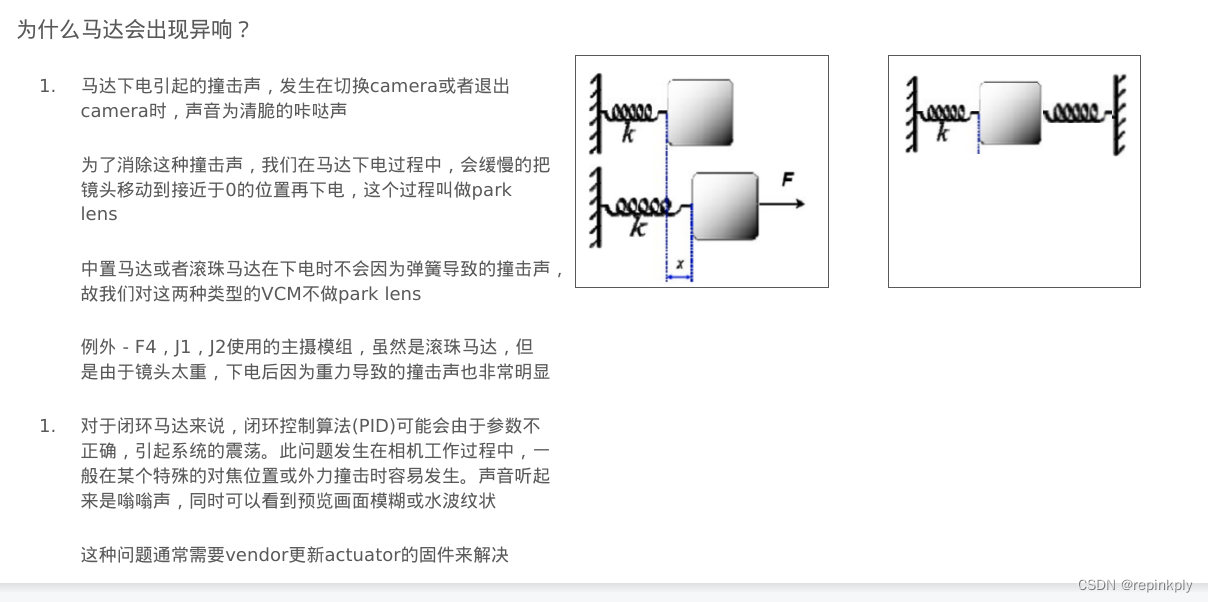
open loop
DAC code对应的是actuator输出的电流值,低端模组常用,精度不高,需要补偿重力影响。
close loop
DAC code对应的是actuator的hall位置,高端模组常用,精度高,性能好,通常不需要补偿重力影响。
VCM结构

校准

马达异响
OIS

OIS-4轴补偿

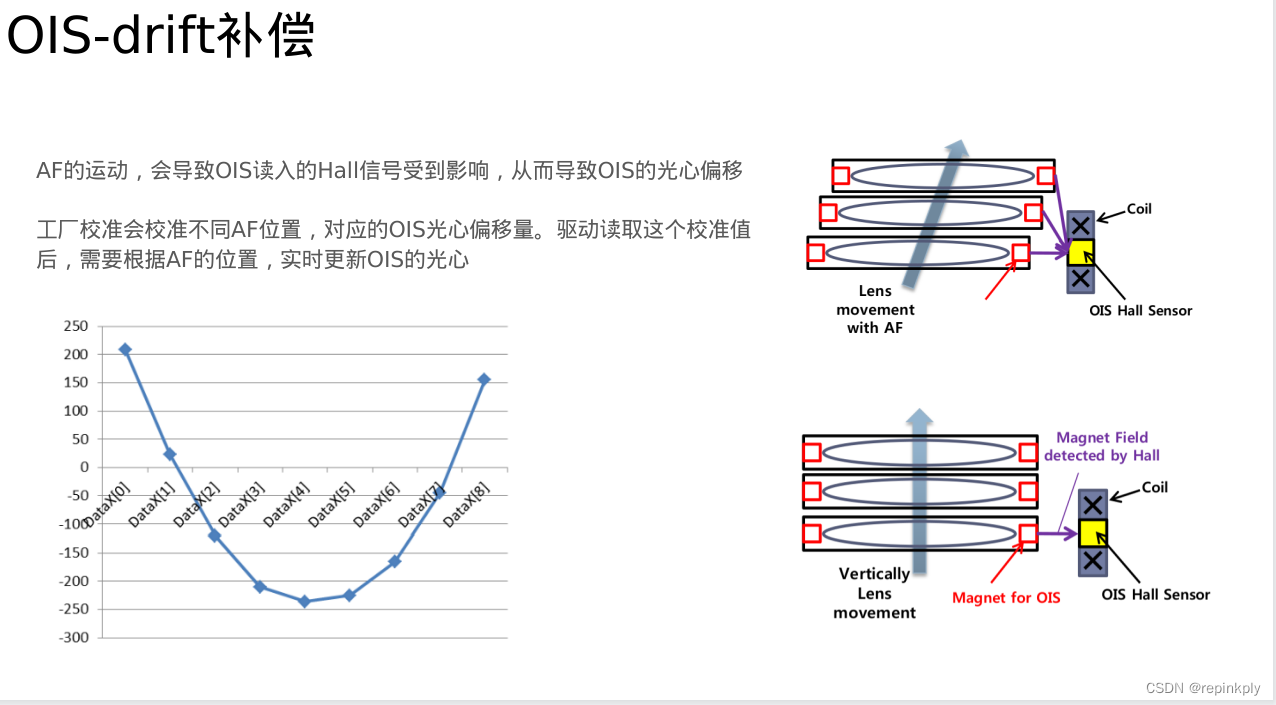
OIS-drift补偿
OIS常见问题

EEPROM

EEPROM常见问题

ToF

闪光灯

-
相关阅读:
基于html+jquery开发的科学计算器(课程作业)
一场直播脚本的策划及话术怎么写?
ClickHouse 的 MergeTree 引擎读写流程
借助MLOps平台简化联邦学习工作流程
如何系统地学习 JavaScript?
Go 之 captcha 生成图像验证码
【Azure 应用服务】Azure JS Function 异步方法中执行SQL查询后,Callback函数中日志无法输出问题
y122.第七章 服务网格与治理-Istio从入门到精通 -- 流量治理实战进阶(八)
Django小白开发指南
Qt在空窗口中创建自己的按钮
- 原文地址:https://blog.csdn.net/weixin_42136255/article/details/133765054