-
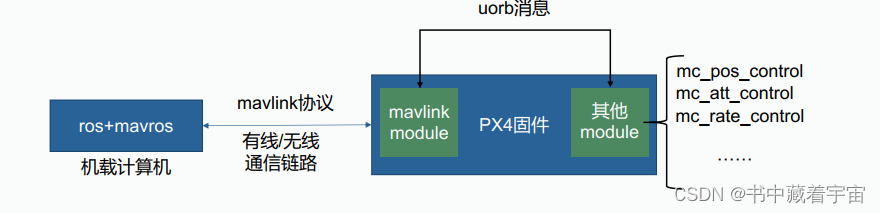
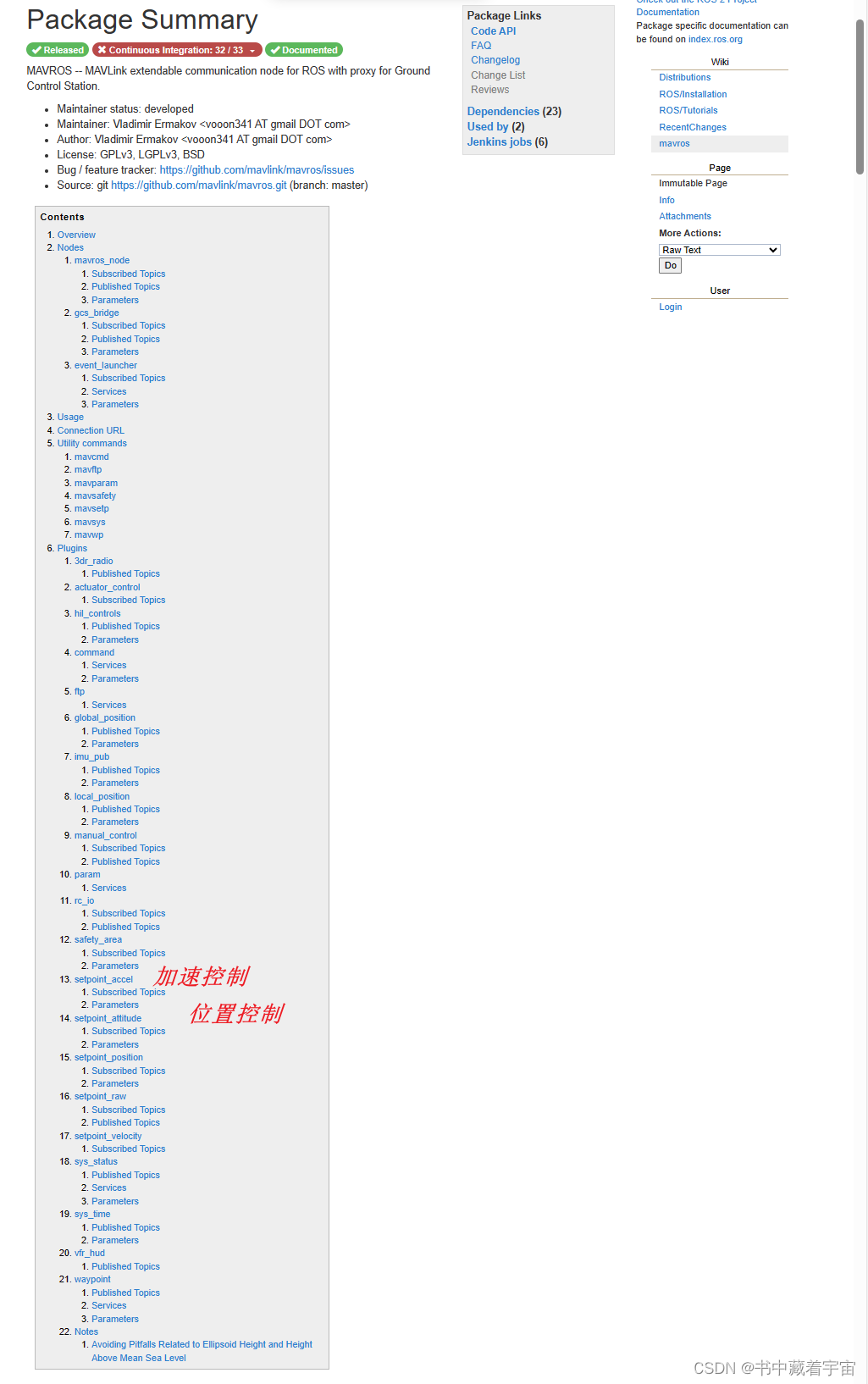
px4仿真实现无人机自主飞行
-
相关阅读:
【基于stm32f407应用】中断模式串口通讯-USART1
Pytorch之LeNet-5图像分类
运维管理数智化:数据与智能运维场景实践
文科生的爬藤神器:HIEEC哈佛国际经济学论文比赛
[BAT-表姐御用02tree命令】提取目录文件夹及其子文件后,tree形列出
批量更新 AWS ECS Fargate 服务
关于硕士论文盲审的一些感受
An工具介绍之摄像头
如何在已有的vue项目里面使用electron? (普通项目转成桌面端应用)
docker pull 拉取镜像报错
- 原文地址:https://blog.csdn.net/m0_49586319/article/details/133688700