-
在SOLIDWORKS搭建一个简易的履带式机器人
前言
趁着十一假期,在solidworks中搭建了一个履带式机器人小车,计划将其应用在gazebo中完成多机器人编队的仿真。
一、构建模型基本单元
构建底板(a面)
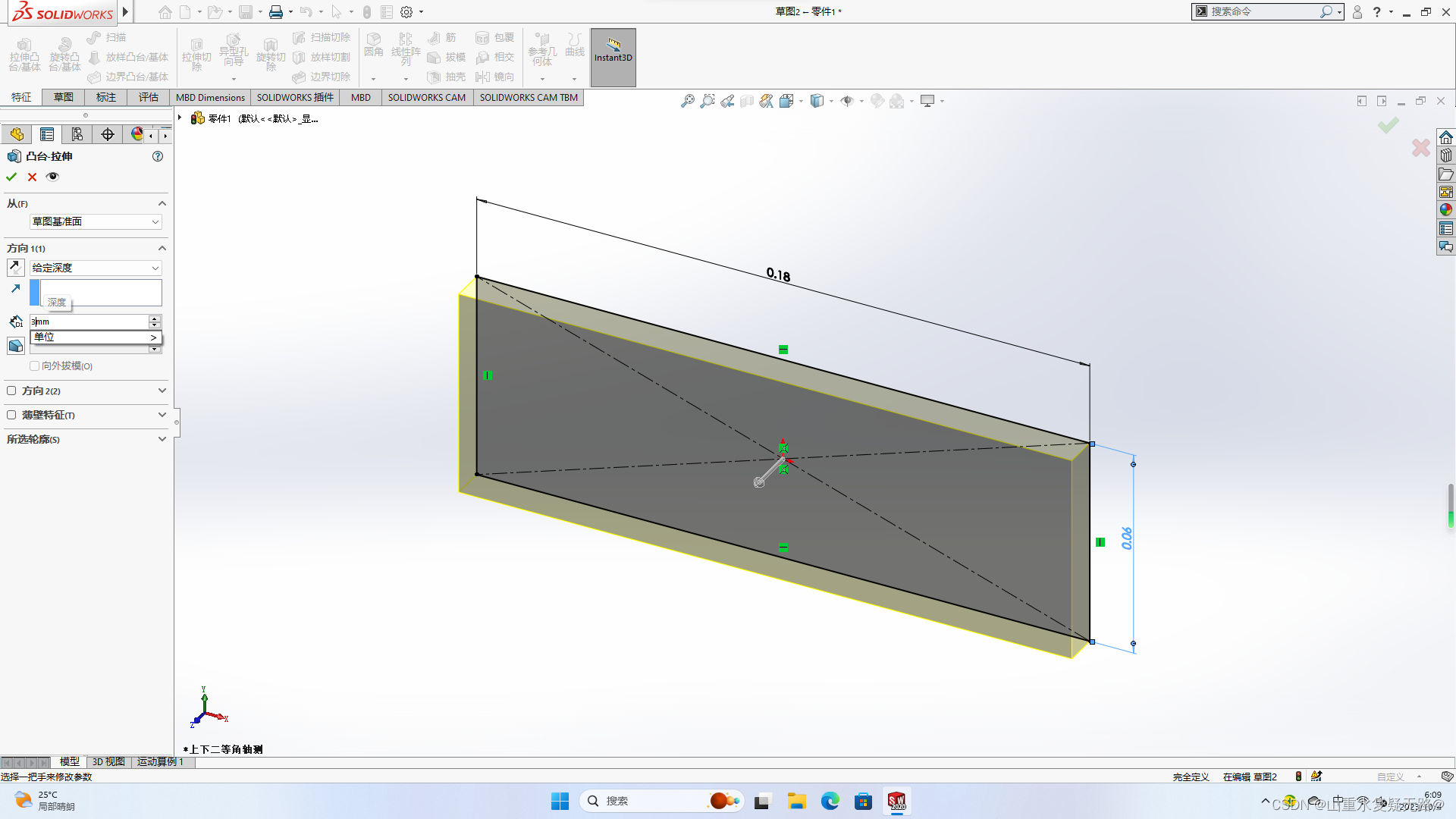
构建底板(b面)

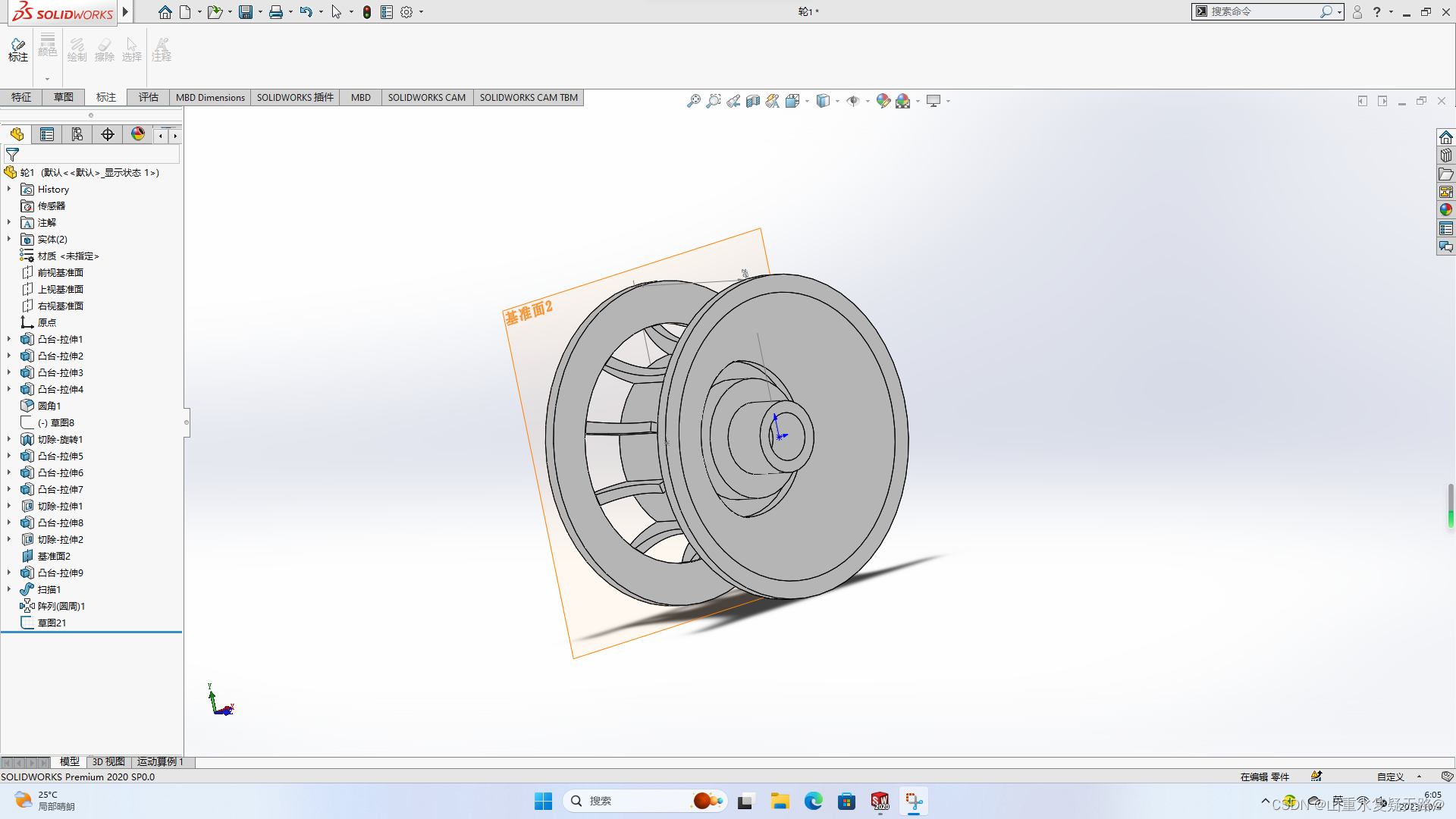
履带轮子:
单位履带:

激光雷达:

二、搭建车体模块
简单的将底板a,b面进行组合

组合完成

三.插入轮子
在车体侧面开孔以插入车轮支柱:


插入支柱:

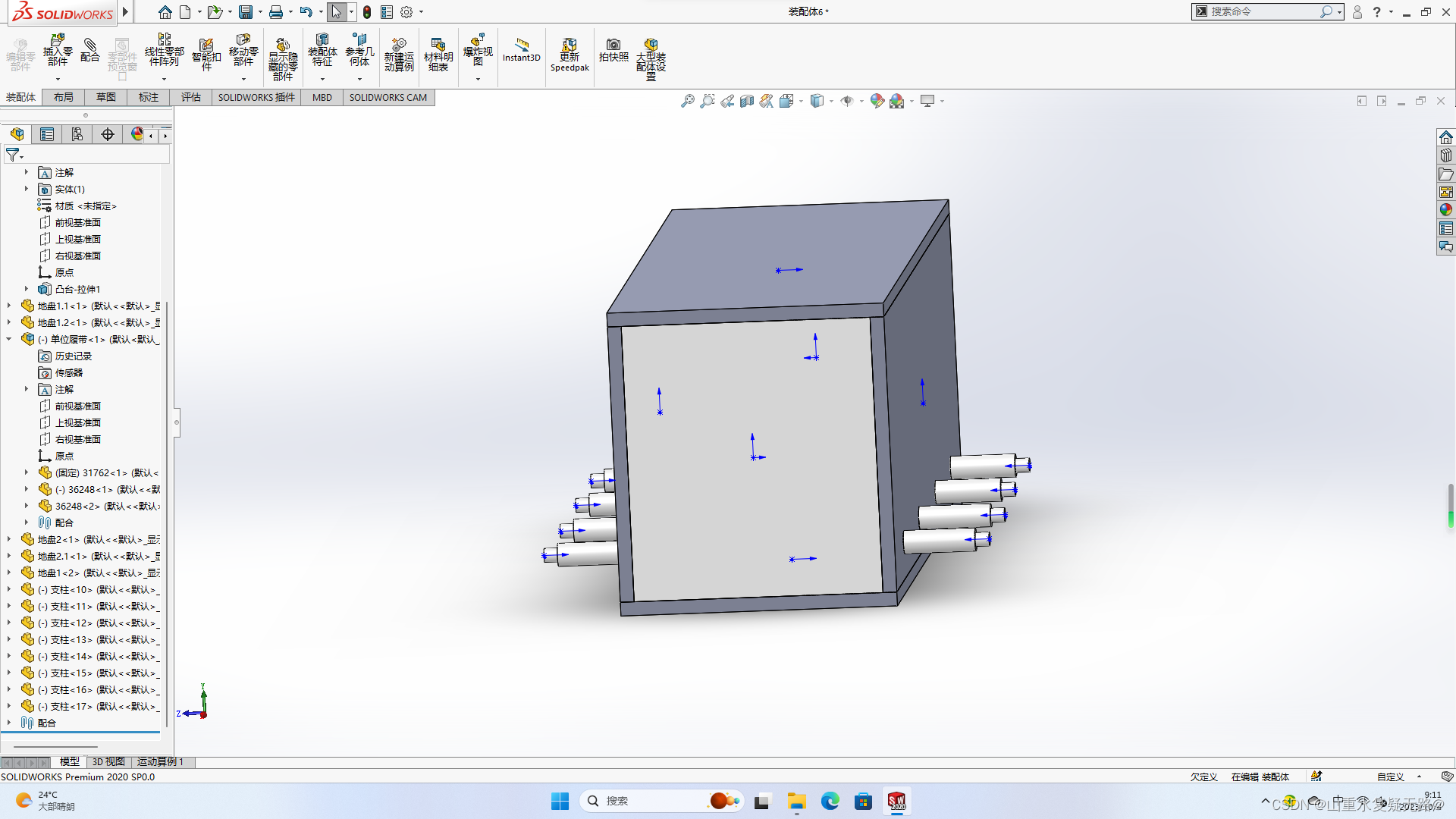
插入轮子:

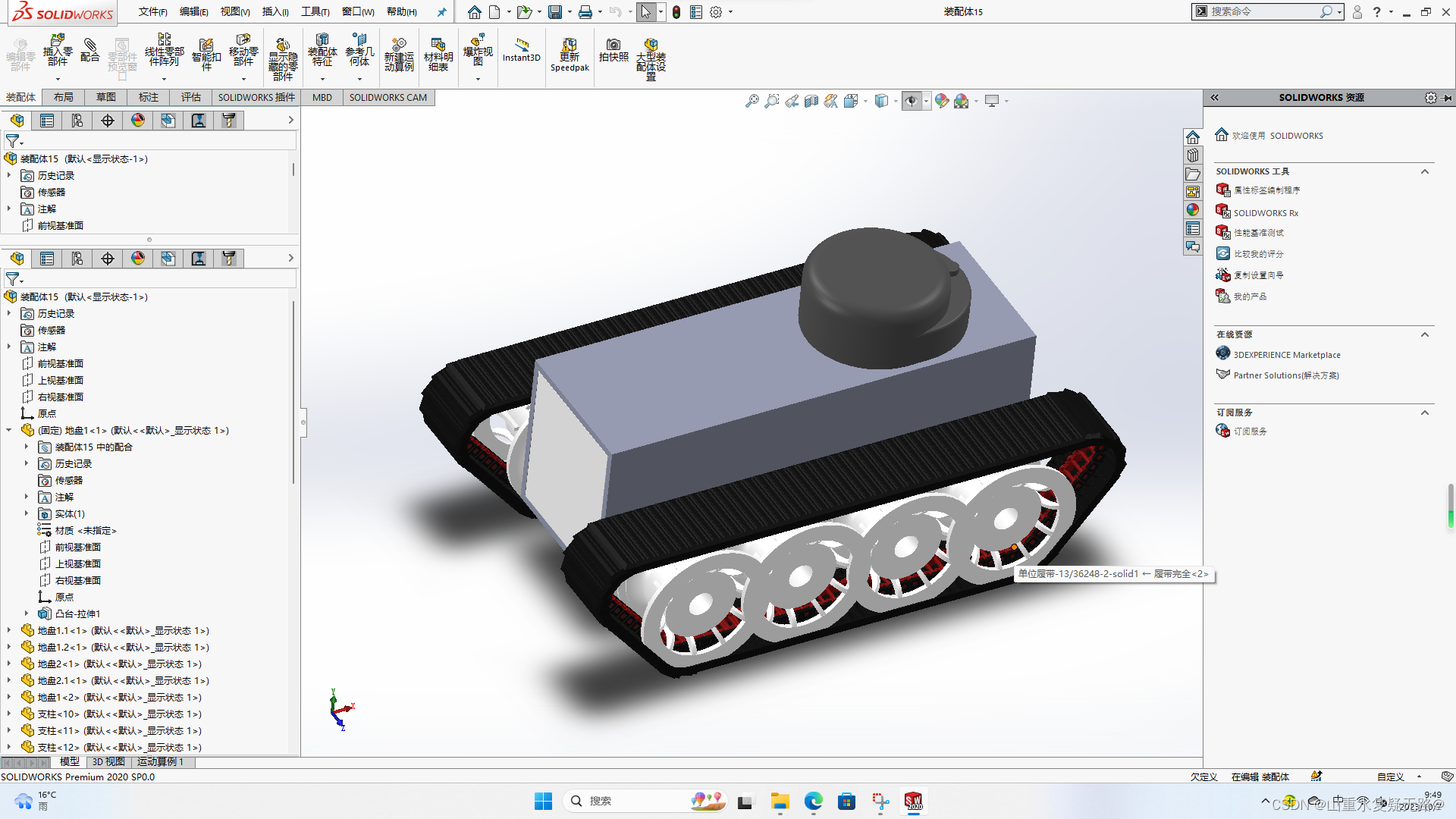
4.构建履带
先确定履带的轮廓位置:


通过零部件阵列,将单位履带加载在轮廓中:

设置机械传动:

完成视图:
-
相关阅读:
华为S7700交换机如何清除console密码
软件测试(黑盒/白盒测试/集成测试)
2022年最新河北建筑八大员(机械员)模拟考试题库及答案
Apollo安装全攻略
python解析robot framework的output.xml并生成html
测试左移和右移怎么做,这篇文章写的太详细了
流程控制for和while循环语句
java认证与证书
Spark AQE
[MySQL] 多表查询
- 原文地址:https://blog.csdn.net/qq_45252077/article/details/133632415