-
MATLAB:线性系统的建模与仿真(含完整程序)
目录
- 前言
- 实验内容
- 一、先看作业题目要求
- 二、作业正文
- Modeling LTI systems
- Establish model
- 1.tf(sys2)
- 2. tf(sys3)
- 3.zpk(sys1)
- 4. zpk(sys3)
- 5. ss(sys1)
- 6. ss(sys2)
- 7.[num,den] = tfdata(sys1)
- 8.[num,den] = tfdata(sys2)
- 9.[num,den] = tfdata(sys3)
- 10.[num,den] = tfdata(sys1,’v’)
- 11. [num,den] = tfdata(sys2,’v’)
- 12. [num,den] = tfdata(sys3,’v’)
- 13. [num,den] = zpkdata(sys1)
- 14. [num,den] = zpkdata(sys2)
- 15. [num,den] = zpkdata(sys3)
- 16. [num,den] = zpkdata(sys1,’v’)
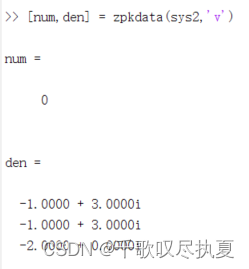
- 17. [num,den] = zpkdata(sys2,’v’)
- 18. [num,den] = zpkdata(sys3,’v’)
- 19. [num,den] = ssdata(sys1)
- 20. [num,den] = ssdata(sys2)
- 21. [num,den] = ssdata(sys3)
- Step and impulse responses
- Poles and step response
- Effect of zeroes on step response
- Responses to otherr inputs
- 三、资源包内容
前言
花了好大心血完成了一份留学作业系列——3:线性系统的建模与仿真;供大家参考,文末有Simulink程序及无水印Word文档。
实验内容
本实验主要是用Matlab来进行:
1、对线性定常系统建模;
2、得到阶跃响应和脉冲响应;
3、研究磁极位置对响应的影响;
4、研究零对反应的影响;
5、确定对一般输入的时间响应。一、先看作业题目要求







注意:由于PPT较长,剩下题目请看压缩包文件。
二、作业正文
Modeling LTI systems
Establish model
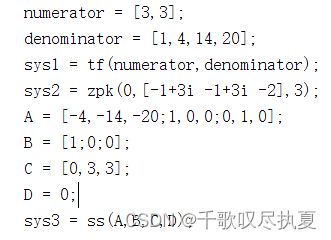
1.tf(sys2)

2. tf(sys3)

3.zpk(sys1)

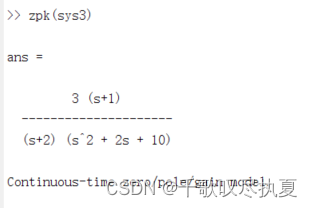
4. zpk(sys3)
5. ss(sys1)
6. ss(sys2)

7.[num,den] = tfdata(sys1)
Cell array
num = [0,0,3,3]
den = [1,4,14,20]8.[num,den] = tfdata(sys2)
Cell array
num = [0,0,3,0]
den = [1+0i, 4-6i, -4-18i, -16-12i]9.[num,den] = tfdata(sys3)
Cell array
num = [0,0,3,3]
den = [1,4,14,20]10.[num,den] = tfdata(sys1,’v’)

11. [num,den] = tfdata(sys2,’v’)

12. [num,den] = tfdata(sys3,’v’)

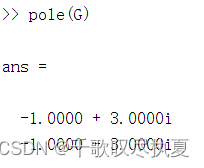
13. [num,den] = zpkdata(sys1)
Cell array
num = -1
den = [-0.999999999999998+3i; -0.999999999999998-3i; -1.999999999999999+0i]14. [num,den] = zpkdata(sys2)
Cell array
num = 0
den = [-1+3i; -1+3i; -2+0i]15. [num,den] = zpkdata(sys3)
Cell array
num = -1
den = [-0.999999999999998+3i; -0.999999999999998-3i; -1.999999999999999+0i]16. [num,den] = zpkdata(sys1,’v’)
17. [num,den] = zpkdata(sys2,’v’)
18. [num,den] = zpkdata(sys3,’v’)
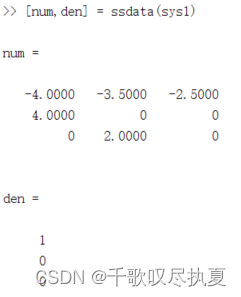
19. [num,den] = ssdata(sys1)
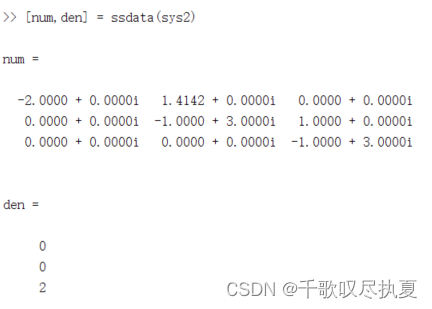
20. [num,den] = ssdata(sys2)
21. [num,den] = ssdata(sys3)

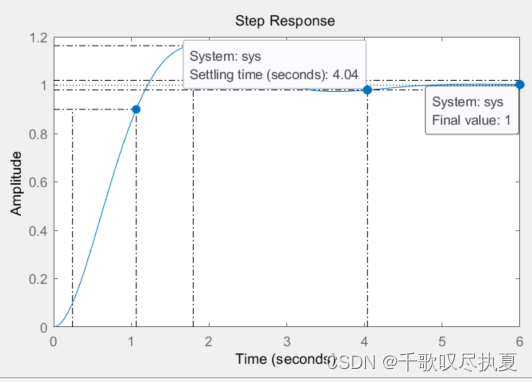
Step and impulse responses





Poles and step response
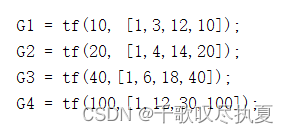
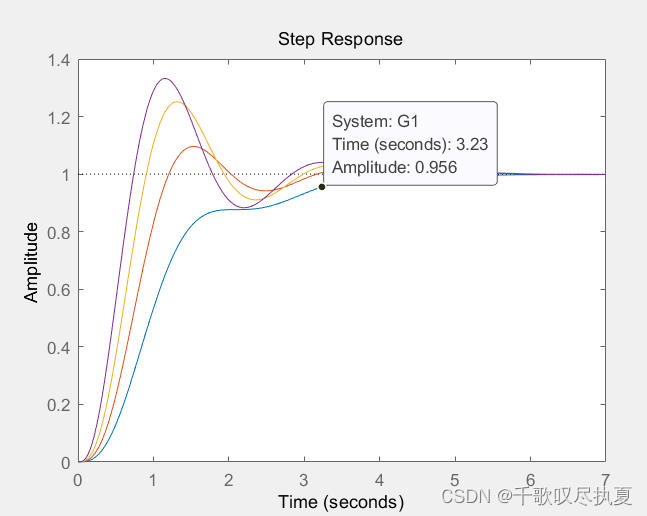



Effect of zeroes on step response
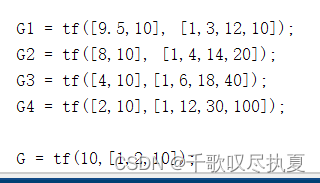

- When all else is equal, an additional closed-loop zero will increase the overshoot of the second-order system step response and decrease the rise time and peak time… 2. The closer the additional zero point is from the left side of the pole to the pole, the more significant (i.e., less) the above effects are. 3. When the zero point is far from the imaginary axis, or very large, the effect of the zero point can be ignored, and then the second-order system without zero point can be used instead.
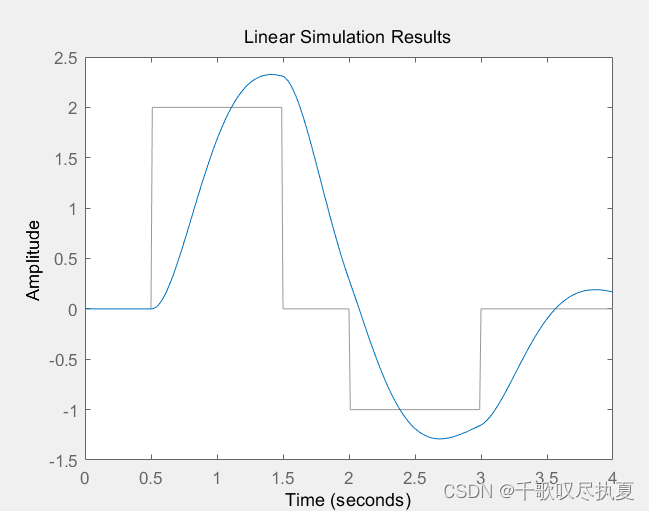
Responses to otherr inputs

三、资源包内容
-
相关阅读:
java基础之浅聊阻塞队列BlockingQueue
Go 结构体深度探索:从基础到应用
Python学习七:数据库编程接口
系统方向学习9--android 10.0 去掉未知来源弹窗 默认授予安装未知来源权限
iceberg学习笔记(2)—— 与Hive集成
C语言中的文件操作函数
水利遥测终端机水文监测应用
164. 最大间距
互联网基石:TCP/IP 四层模型,由浅入深直击原理!
利用Java EE相关技术实现一个简单的Web聊天室系统
- 原文地址:https://blog.csdn.net/weixin_46423500/article/details/133613648