-
CLIP与DINOv2的图像相似度对比
在计算机视觉领域有两个主要的自监督模型:CLIP和DINOv2。CLIP彻底改变了图像理解并且成为图片和文字之间的桥梁,而DINOv2带来了一种新的自监督学习方法。
在本文中,我们将探讨CLIP和DINOv2的优势和它们直接微妙的差别。我们的目标是发现哪些模型在图像相似任务中真正表现出色。
CLIP
使用CLIP计算两幅图像之间的相似性是一个简单的过程,只需两步即可实现:提取两幅图像的特征,然后计算它们的余弦相似度。
我们先创建虚拟环境并安装包
#Start by setting up a virtual environment virtualenv venv-similarity source venv-similarity/bin/activate #Install required packages pip install transformers Pillow torch- 1
- 2
- 3
- 4
- 5
接下来进行图像相似度的计算:
import torch from PIL import Image from transformers import AutoProcessor, CLIPModel import torch.nn as nn device = torch.device('cuda' if torch.cuda.is_available() else "cpu") processor = AutoProcessor.from_pretrained("openai/clip-vit-base-patch32") model = CLIPModel.from_pretrained("openai/clip-vit-base-patch32").to(device) #Extract features from image1 image1 = Image.open('img1.jpg') with torch.no_grad(): inputs1 = processor(images=image1, return_tensors="pt").to(device) image_features1 = model.get_image_features(**inputs1) #Extract features from image2 image2 = Image.open('img2.jpg') with torch.no_grad(): inputs2 = processor(images=image2, return_tensors="pt").to(device) image_features2 = model.get_image_features(**inputs2) #Compute their cosine similarity and convert it into a score between 0 and 1 cos = nn.CosineSimilarity(dim=0) sim = cos(image_features1[0],image_features2[0]).item() sim = (sim+1)/2 print('Similarity:', sim)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26


上面两个相似的图像,获得的相似度得分达到了96.4%
DINOv2
使用DINOv2计算两幅图像之间的相似度的过程与CLIP的过程类似。使用DINOv2需要与前面提到的相同的软件包集,而不需要任何额外的安装:
from transformers import AutoImageProcessor, AutoModel from PIL import Image import torch.nn as nn device = torch.device('cuda' if torch.cuda.is_available() else "cpu") processor = AutoImageProcessor.from_pretrained('facebook/dinov2-base') model = AutoModel.from_pretrained('facebook/dinov2-base').to(device) image1 = Image.open('img1.jpg') with torch.no_grad(): inputs1 = processor(images=image1, return_tensors="pt").to(device) outputs1 = model(**inputs1) image_features1 = outputs1.last_hidden_state image_features1 = image_features1.mean(dim=1) image2 = Image.open('img2.jpg') with torch.no_grad(): inputs2 = processor(images=image2, return_tensors="pt").to(device) outputs2 = model(**inputs2) image_features2 = outputs2.last_hidden_state image_features2 = image_features2.mean(dim=1) cos = nn.CosineSimilarity(dim=0) sim = cos(image_features1[0],image_features2[0]).item() sim = (sim+1)/2 print('Similarity:', sim)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
上面CLIP示例中相同的图像对,DINOv2获得的相似性得分为93%。
两个模型都可以给出图像的相似性,下面我们来进行深入的研究。
使用COCO数据集进行测试
这里使用来自COCO数据集验证集的图像来比较CLIP和DINOv2产生的结果。
流程如下:
- 遍历数据集以提取所有图像的特征。
- 将嵌入存储在FAISS索引中。
- 提取输入图像的特征。
- 检索前三个相似的图像。
1、特征提取和创建索引
import torch from PIL import Image from transformers import AutoProcessor, CLIPModel, AutoImageProcessor, AutoModel import faiss import os import numpy as np device = torch.device('cuda' if torch.cuda.is_available() else "cpu") #Load CLIP model and processor processor_clip = AutoProcessor.from_pretrained("openai/clip-vit-base-patch32") model_clip = CLIPModel.from_pretrained("openai/clip-vit-base-patch32").to(device) #Load DINOv2 model and processor processor_dino = AutoImageProcessor.from_pretrained('facebook/dinov2-base') model_dino = AutoModel.from_pretrained('facebook/dinov2-base').to(device) #Retrieve all filenames images = [] for root, dirs, files in os.walk('./val2017/'): for file in files: if file.endswith('jpg'): images.append(root + '/'+ file) #Define a function that normalizes embeddings and add them to the index def add_vector_to_index(embedding, index): #convert embedding to numpy vector = embedding.detach().cpu().numpy() #Convert to float32 numpy vector = np.float32(vector) #Normalize vector: important to avoid wrong results when searching faiss.normalize_L2(vector) #Add to index index.add(vector) def extract_features_clip(image): with torch.no_grad(): inputs = processor_clip(images=image, return_tensors="pt").to(device) image_features = model_clip.get_image_features(**inputs) return image_features def extract_features_dino(image): with torch.no_grad(): inputs = processor_dino(images=image, return_tensors="pt").to(device) outputs = model_dino(**inputs) image_features = outputs.last_hidden_state return image_features.mean(dim=1) #Create 2 indexes. index_clip = faiss.IndexFlatL2(512) index_dino = faiss.IndexFlatL2(768) #Iterate over the dataset to extract features X2 and store features in indexes for image_path in images: img = Image.open(image_path).convert('RGB') clip_features = extract_features_clip(img) add_vector_to_index(clip_features,index_clip) dino_features = extract_features_dino(img) add_vector_to_index(dino_features,index_dino) #store the indexes locally faiss.write_index(index_clip,"clip.index") faiss.write_index(index_dino,"dino.index")- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
2、图像相似度搜索
import faiss import numpy as np import torch from transformers import AutoImageProcessor, AutoModel, AutoProcessor, CLIPModel from PIL import Image import os #Input image source='laptop.jpg' image = Image.open(source) device = torch.device('cuda' if torch.cuda.is_available() else "cpu") #Load model and processor DINOv2 and CLIP processor_clip = AutoProcessor.from_pretrained("openai/clip-vit-base-patch32") model_clip = CLIPModel.from_pretrained("openai/clip-vit-base-patch32").to(device) processor_dino = AutoImageProcessor.from_pretrained('facebook/dinov2-base') model_dino = AutoModel.from_pretrained('facebook/dinov2-base').to(device) #Extract features for CLIP with torch.no_grad(): inputs_clip = processor_clip(images=image, return_tensors="pt").to(device) image_features_clip = model_clip.get_image_features(**inputs_clip) #Extract features for DINOv2 with torch.no_grad(): inputs_dino = processor_dino(images=image, return_tensors="pt").to(device) outputs_dino = model_dino(**inputs_dino) image_features_dino = outputs_dino.last_hidden_state image_features_dino = image_features_dino.mean(dim=1) def normalizeL2(embeddings): vector = embeddings.detach().cpu().numpy() vector = np.float32(vector) faiss.normalize_L2(vector) return vector image_features_dino = normalizeL2(image_features_dino) image_features_clip = normalizeL2(image_features_clip) #Search the top 5 images index_clip = faiss.read_index("clip.index") index_dino = faiss.read_index("dino.index") #Get distance and indexes of images associated d_dino,i_dino = index_dino.search(image_features_dino,5) d_clip,i_clip = index_clip.search(image_features_clip,5)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
3、结果
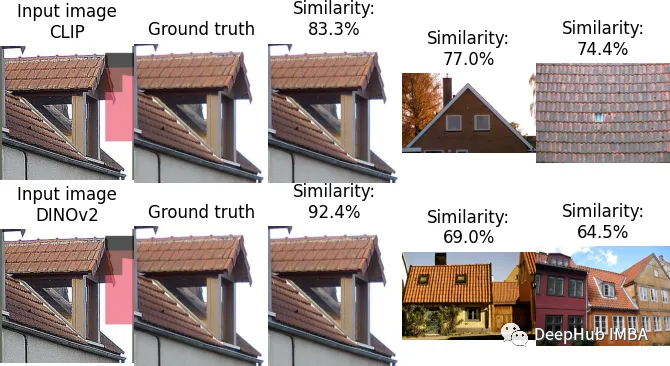
使用四种不同的图像作为输入,搜索产生了以下结果:




如果肉眼判断,DINOv2表现出稍好的性能。
使用DISC21数据集进行测试
为了量化CLIP和DINOv2的差别,我们选择了专门为图像相似性搜索创建的DISC21数据集。由于它的实际大小为350GB,我们将使用150,000个图像子集。
在参数方面,我们将计算:
- 准确率:正确预测的图像与图像总数的比率。
- top -3准确率:在前三幅相似图像中找到正确图像的次数占图像总数的比例。
- 计算时间:处理整个数据集所需的时间。
结果如下:
特征提取:CLIP:每秒70.7个图像,DINOv2:每秒69.7个图像,2者的计算密集度都差不多。
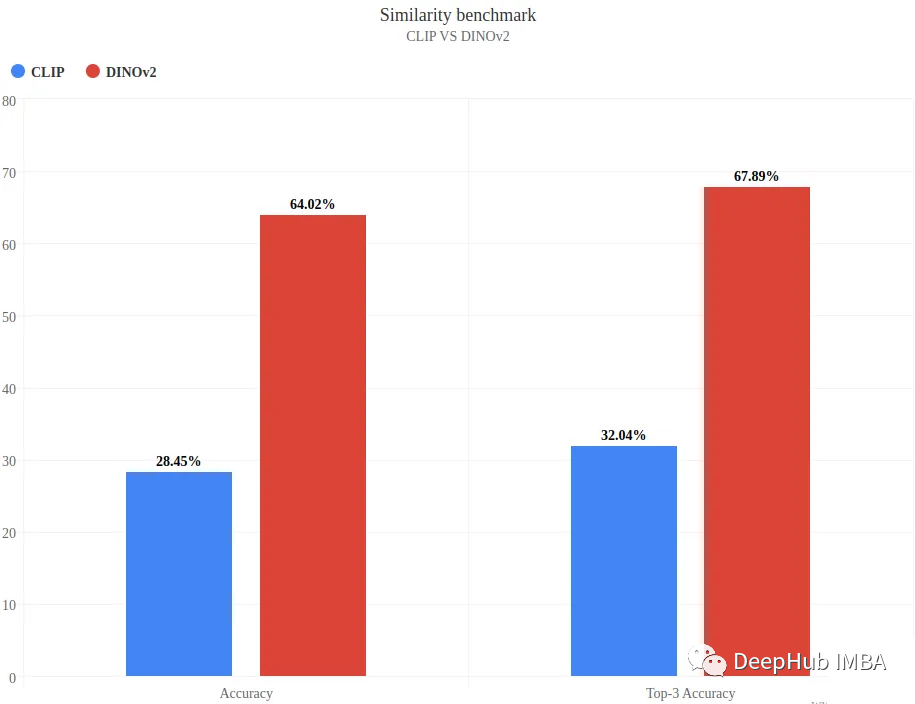
准确率和前三名的准确率
两种模型都正确地预测了图像
所有模型都找不到正确的图像

只有CLIP预测正确的图像,DINOv2的top3

只有DINOv2预测正确的图像

结果分析
DINOv2明显的胜出,他在这个个非常具有挑战性的数据集上实现了64%的准确率。相比之下,CLIP只有28.45%。
在计算效率方面两种模型表现出非常相似的特征提取时间。
这里DINOv2大幅领先的一个原因是MetaAI使用DISC21数据集作为其模型的基准,这肯定会给DINOv2带来有利的优势。但是我们可以看到在COCO数据集上的测试中显示了有趣的细微差别:DINOv2在识别图像中的主要元素方面表现出更高的能力,而CLIP在专注于输入图像中的特定细节方面表现得很熟练(看看 bus那个图像,CLIP找出的全部是红色的车,这可能是因为它与文本对齐时包含了颜色)
还有一个问题就是CLIP和DINOv2之间嵌入维数的差异。CLIP的嵌入维数为512,而DINOv2的嵌入维数为768。所以可能也是差异的原因,但是如果使用更大的CLIP模型,执行的速度应该不会这么快了。
总结
DINOv2在图像相似任务中表现出卓越的准确性,展示了其实际应用的潜力。CLIP虽然值得称赞,但相比之下就显得不足了。CLIP在需要关注小细节的场景中特别有用。两种模型都表现出相似的计算效率,如果只针对于图像的单模态,DINOv2应该是一个不错的选择。
https://avoid.overfit.cn/post/bed7816b98f6487a9ed88a52f32f8dcd
作者:JeremyK
-
相关阅读:
许战海战略文库|隆基绿能,光伏龙头如何走出战略无人区?
悲观锁与乐观锁介绍,优缺点
只需4步使用Redis缓存优化Node.js应用
Python 异常
STM32液晶显示中英文
Linux -- httpd服务
python 实现k-means聚类算法 银行客户分组画像实战(超详细,附源码)
Linux虚拟机部署与发布项目(Windows版本)
docker底层实现
MySQL:一文掌握MySQL索引
- 原文地址:https://blog.csdn.net/m0_46510245/article/details/133604873
