-
机器人过程自动化(RPA)入门 10. 部署和维护机器人
在完成自动化项目设计后,我们使用Orchestrator来管理我们的机器人。在此之前,我们首先使用发布实用程序发布工作流。一旦我们发布了项目,包就会被上传到服务器。然后,我们使用Orchestrator为任意数量的任务管理任意数量的机器人。Orchestrator Server还提供了安排机器人程序的功能,并根据用户的需要指定它们工作的时间间隔。
为了了解更多信息,让我们看一下本章将涵盖的主题概述:
- 使用发布实用程序发布
- 业务流程服务器概述
- 使用编排服务器控制机器人程序
- 使用编排服务器部署机器人程序
- 许可证管理
- 发布和管理更新
使用发布实用程序发布
我们为一些功能设计了一个工作流程,这样可以减少我们的工作量和时间。当工作流成功完成时,我们无法一次又一次地打开UiPath来运行我们的工作流。因此,要直接从UiPath Robot使用工作流,我们必须首先发布工作流,然后通过Orchestrator进行调度。一旦我们的工作流发布,我们就可以使用Orchestrator的UiPath Robot直接运行我们的工作流。
如何在UiPath中发布工作流
以下是在UiPath中发布工作流所需遵循的步骤:
- 首先,打开UiPathStudio,创建一个新项目,并为其命名。
- 转到“设置”功能区,然后单击“发布”按钮。现在检查项目是否已成功发布:


- 如果工作流已成功发布,则会出现一个对话框,其中包含从Orchestrator运行该工作流所需的所有必要数据:

“信息”对话框显示以下列表中提到的所有信息:
- 发布项目的Orchestrator的URL。
- 您已从UiPath Studio发布的包的名称。
- 发布到Orchestrator的包的版本。当我们在UiPath Studio中创建任何项目时,默认情况下,路径保存在C:\Users\username\Documents\UiPath中,或者用户可以手动更改。创建项目时,会创建一个文件夹,其中包含以下类型的文件:
.screenshot 文件夹
.xaml 文件自动创建在自动化过程中
project.json.该项目文件包含有关该项目的信息
当我们将包发布到Orchestrator Server时,它会自动到达服务器,并且可以在“包”页面上查看。但是,如果在Orchestrator Server上找不到包,那么我们也可以手动添加包,如以下步骤所示:
- 单击上载程序包选项:

- 单击浏览并导航到第一步中发布包的位置。
- 单击上传。
- 现在,单击“进程”,然后在“程序包”页面的空“搜索”框中键入程序包名称,即可搜索程序包。
在.json文件中写入/编辑已发布的包信息
.json文件可以在项目中找到。要编辑项目中的.json文件,我们应遵循给定的步骤:
- 转到项目目录
- 在任何编辑器(如记事本)中打开.json文件++
- 现在编辑Orchestrator启动时要执行的自动化项目的主要参数:

- 现在保存.json文件
- 转到Orchestrator的“流程”页面,然后单击“程序包”按钮
业务流程服务器概述
机器人的使用并不像现在这么流行。换句话说,我们可以说机器人是在有限的环境中工作的。但今天,由于机器人过程自动化(RPA),机器人可以在不同的环境中工作。如今,他们的表现已不受限制。他们现在在自动化方面发挥着重要作用,充当机器人的助手,充分发挥机器人的潜力。他们可以全天候工作,他们的操作可以通过Orchestrator Server进行管理和调度。UiPath Orchestrator是一个web服务器,它为您提供了一个维护和调度机器人程序的环境。Orchestrator是一个高度可访问的web服务器平台,用于从一个机器人到多个机器人的快速部署。
在自主自动化技术中,一个机器人可以使另一个机器人自动化。这意味着机器人可以管理另一个类似机器人的过程的所有活动;调度等等。
机器人有两种类型:
- 前台机器人(助理机器人)
- 后台机器人
- 前台机器人(助理机器人):前台机器人为用户提供帮助。这些机器人在这个过程中需要用户交互。前台机器人是一个代理助理,这意味着用户需要与流程进行交互。例如,Robot要求用户提供凭据,或者显示一些消息或对话框,要求用户对此做出响应,否则将无法进行进一步的处理。一些业务流程需要由触发器活动执行,在触发器活动中,一旦任务被触发,Robot就能够在锁定屏幕后面运行自动化流程。
- 后台机器人:后台机器人可以登录到窗口会话,并在无人值守模式下运行自动化进程。它们可以在Orchestrator的帮助下启动。我们可以安排这些机器人,也可以使用UiPath Robot或UiPath Studio手动运行它们。
UiPath Orchestrator有一些逻辑组件,如下所示:
- 用户界面层:Web Application
- Web服务层:
Monitoring ServiceLogging ServiceDeployment ServiceConfiguration ServiceQueues Service
- 持久层:
SQL ServerElasticSearch
队列
队列作为一个容器来存储需要实现的任务。简单地想象一下,一群男孩站在售票柜台前排队。逻辑是先进去的人先出来。先进先出(FIFO)。
类似地,在机器人的情况下,当我们有许多操作要执行时,当服务器繁忙时,任务会在队列中移动,并在相同的逻辑先进先出(FIFO)上实现。
要创建新队列,请在左侧列出的Orchestrator Server中搜索“队列”选项,然后在“队列”页面中添加一个。它还允许您访问所有已经创建的队列。它包含一些关于任务的信息,如剩余时间、进度时间、平均时间、描述等,如以下屏幕截图所示:

我们还可以从UiPath Studio添加队列项目,并且有各种活动支持此功能,如下所示:
- 添加队列项目:此活动用于将新项目添加到Orchestrator中的队列中。项目的状态将为“新建”。
- 添加事务项目:此活动用于将项目添加到队列中以开始事务,并将状态设置为“进行中”。在这里,我们可以为每个相应的事务添加自定义引用。
- 获取事务项目:此活动用于从队列中获取项目以进行处理,并将其状态设置为“进行中”。
- 延迟事务项:此活动用于定义处理事务的时间参数。在这里,基本上,我们将指定流程开始的时间间隔。
- 设置事务处理进度:用于帮助和创建进行中事务的自定义进度状态。在进程崩溃时通知其进度。此活动在解决故障排除过程中发挥着重要作用。
- 设置交易状态:用于修改交易项目的状态;无论是失败还是成功。
资产
资产作为变量或凭证工作,可以在不同的自动化项目中使用。资产提供了保存特定信息的机会。机器人可以很容易地访问这些信息。资产活动可以从活动面板中找到,如以下屏幕截图所示:

此外,资产还可以用于安全目的来存储凭据。正如我们所知,所有凭证都是通过AES 256算法以加密格式存储的。当RPA开发人员在设计流程时,开发人员可以调用它,但它的值仍然是隐藏的。
要在Orchestrator中创建新资产,我们需要打开资产页面。它还显示了可以删除或编辑的所有以前创建的资源:
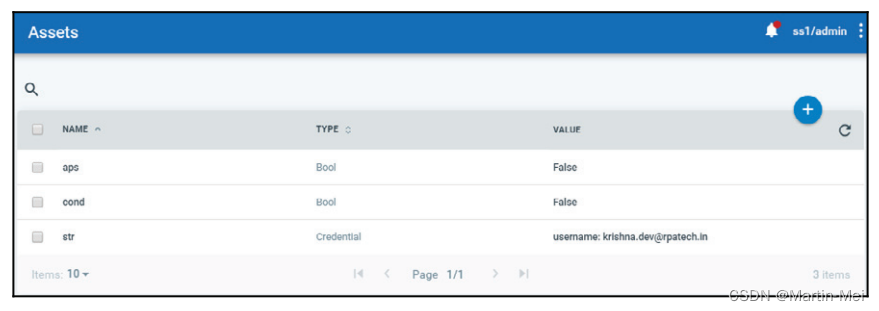
资产有两种类型:
- 获取资产
- 获取凭据
根据提供的“AssetName”,“获取资产”和“获取凭证”活动在Studio中用于向Orchestrator请求有关特定资产的信息。
“对于Orchestrator数据库中已存储的资产,AssetName是必需的,以便Robot可以访问存储在资产中的信息。为此,Robot需要获得从该特定资产中检索信息以用于自动化项目的权限。我们可以使用UiPath Studio的“活动”面板中的“获取资产”活动获取资产,如前所述。
资产价值有四种类型:
- Text:它保存字符串值。
- 布尔值:这只支持true或false值。
- Integer:用于存储整数值。
- 凭据:它保存Robot执行特定进程(如登录详细信息)所需的用户名和密码。
此外,我们还有以下类型的资产:
- 全局:所有可用的机器人都可以访问和使用
- 每个机器人:只能由指定的机器人访问
流程
该流程负责将包部署并上载到Orchestrator环境,以及部署已创建的包。在UiPath Studio中,我们可以在Activities面板中的Orchestrator选项中搜索process。它包含一个“应该停止”活动,可用于在需要时停止流程:

进程有助于在机器人机器上分发所有包,从而加快执行速度。我们可以从Orchestrator左角的作业面板将作业分配给这些流程:

在每个阶段,一个包都链接到环境,并自动与属于特定环境的每个机器人机器一起分发。每当您对之前创建的包进行更改并上传这些更改时,它就会创建该包的新版本。因此,为了更新您的程序包,您可以转到该程序包上可用的“管理版本”选项,然后选择要使用的程序包版本:

如果某个软件包的新更新可用,则该软件包上会显示一个图标。
当我们使用具有特定流程的包的最新可用版本时,图标
 将显示在该流程旁边。我们在Studio中使用的所有活动都存储在Orchestrator可以访问的NuGet提要中。当我们添加新进程时,环境的名称应该与Robot的名称相同。这允许使用相应的机器人执行过程。
将显示在该流程旁边。我们在Studio中使用的所有活动都存储在Orchestrator可以访问的NuGet提要中。当我们添加新进程时,环境的名称应该与Robot的名称相同。这允许使用相应的机器人执行过程。部署流程
部署流程基本上是指将包分发给可用的机器人。
如前所述,在从UiPath Studio成功发布项目后,我们可以按照以下步骤部署流程:
- 打开Orchestrator网页。
- 单击左侧的“进程”选项。
- 进程窗口将出现在网页上。
- 现在单击+按钮添加包。将显示Deploy Process(部署进程)窗口。
- 现在从下拉列表中选择所需的包名称(此处的包对应于您从UiPath Studio发布的项目)。
- 在这里,描述选项是可选的。
- 最后,单击CREATE按钮来部署流程:

使用编排服务器控制机器人程序
当涉及到控制Robot Orchestrator时,是最好的选择。编排服务器可用于安排机器人程序,以便机器人程序可以在服务器上指定的时间间隔内执行作业。Orchestrator可以控制无限数量的机器人,我们可以很容易地根据用户的需求为机器人分配各种任务。此外,一个特定的任务可以分配给多个机器人。Orchestrator还为我们提供了维护Robot生成的所有日志的功能。
机器人状态
机器人的状态告诉我们它的可用性和连通性。我们可以了解机器人是否可用、繁忙或断开连接。以下是机器人可以具有:
- 可用:机器人的此状态显示机器人没有处理任何其他任务,可以自由执行任务
- 忙:当机器人当前正在执行某项任务且不可用时,将显示这种状态
- 断开连接:Robot的此状态表示您的Robot不再连接到Orchestrator服务器
编辑Robot
有时,我们可能不得不在Orchestrator中编辑Robot,以防Robot无法正常工作,或者我们想将一些其他任务分配给Robot。
要编辑Robot,请单击“编辑”窗口中的“编辑”按钮,然后根据给定内容更改名称或必要的字段:
- Name
- Username
- Password
- Type
- Description:

删除机器人
当机器人根本不工作时,有必要将其移除,我们可以使用以下任一方法:
- 要删除所需的Robot,请选择该Robot,然后通过单击Orchestrator Server窗口顶部的admin标记转到管理屏幕。然后选择“更多操作”按钮并删除Robot。
- 如果您想从页面中删除一个或多个机器人,我们可以选择它们或从页面中移除它们。
显示机器人的日志
要查看Robot的日志,请转到Robot页面并搜索所需的Robot,单击“更多操作”,然后单击“查看日志”查看Robot发出的日志消息:

使用编排服务器部署机器人程序
要将Robots部署到Orchestrator,我们需要使用Orchestraor配置机器。要做到这一点,我们首先必须从Orchestrator URL:https://platform.uipath.com 创建一个配置Robot
从Orchestrator创建调配Robot
用户需求;注册新Robot的权限,并且他们必须具有以下信息:
- 连接到Orchestrator所需的计算机名称和密钥。它们可以通过控制面板|系统找到,对于密钥,登录Orchestrator URL,单击ROBOT页面,然后单击+按钮。在可以看到密钥的位置会出现一个弹出窗口。安全|系统和用户|设置|部署,为我们提供Robot API密钥。
- 用于访问它的指定计算机的用户名和密码。
- 要创建调配Robot,请转到Orchestrator。单击Orchestrator页面左侧的Robot选项。
- 显示Robot页面后,单击+按钮。它将显示一个小窗口来创建一个供应机器人:

- 显示窗口后,填写连接Robotd机器名称、Robot名称、用户名/域名、密码、类型和描述所需的所有必填信息,如以下屏幕截图所示:

- 在Machine*字段部分,输入连接到Orchestrator所需的机器名称。
- 在“名称*”字段中,输入所需的Robot名称。
- 现在,在Domain\Username*字段中,键入将用于登录到定义的计算机的名称。在这里,如果用户在域中,我们需要定义Domain/Username*格式。必须选择短域名。
- 密码字段是可选的;可以跳过它。
- 我们可以从下拉列表中选择机器人的类型。
- 描述字段也是可选的。你可以给出一个简短的摘要来描述你的机器人。
- 现在,在配置Robot时,复制Robot密钥*并将密钥粘贴到UiPath Robot中。
- 单击PROVISION按钮,机器人将显示在机器人页面上
将Robot连接到Orchestrator
当我们将Robot部署到Orchestrator时,我们必须有每个Robot的机器名称和密钥。为了保持这些字段的值,我们可以从临时机器人窗口创建另一个机器人。
如果我们想创建一个新的机器人,我们必须从管理员那里获得身份验证。默认情况下,管理员有权注册新的Robot。
要将Robot机器连接到Orchestrator,请按照给定步骤进行操作:
- 从系统任务栏中,单击UiPath Robot。机器人窗口将显示:

- 现在转到“选项”并选择“设置…”。。。;将显示机器人设置:

- 在Robot Key字段中,将收到的供应Robot的密钥粘贴到Orchestrator。
- 在Orchestrator URL字段中,输入Orchestraor的地址。
- 现在单击“连接”按钮。单击“连接”按钮后,Robot将连接到Orchestrator。
将Robot部署到Orchestrator
要部署我们的机器人,首先,它必须连接到Orchestrator。确保我们的机器人程序连接到Orchestrator,然后按照给定的步骤进行部署:
- 首先,在机器上安装UiPath。
- 配置Robot机器并从Orchestrator获取Robot密钥。
- 收到密钥后,转到机器人配置面板并在此处输入密钥。
- 此外,您还需要在配置URL中输入Robot键,该URL可以从Orchestrator的管理部分找到。
- 使用UiPath中的发布实用程序发布项目。成功发布后,将显示如下屏幕截图所示的信息:

- 项目已在Orchestrator中发布。
- 要创建环境,请转到主页,单击ROBOT选项,然后单击Environments(环境)选项卡。然后单击+按钮:

- 填写完详细信息后,单击创建:

- 创建环境后,将出现一个小窗口,如以下屏幕截图所示,我们可以在其中管理环境中的机器人:

- 单击+按钮后,将弹出一个窗口,我们可以在其中选择已发布的包,如以下屏幕截图所示,然后单击CREATE按钮:

- 单击Deploy Process按钮后,将出现一个弹出窗口,我们可以在其中选择已发布的包,如以下屏幕截图所示,然后单击CREATE按钮。
- 单击“查看程序包”选项,然后单击“上载”按钮,即可从本地目录手动上载程序包,如以下屏幕截图所示:PROCESS |查看程序包|上载程序包:

- 现在,该包已部署到Orchestrator,并准备通过web执行。
- 接下来,单击JOBS选项执行,然后单击开始图标,如图所示:

- 单击“开始作业”按钮后,Robot将在Orchestrator上执行。
许可证管理
要管理和部署机器人,我们需要在其服务器上注册许可证。一旦您获得了许可证,部署和维护过程就会变得更快。
激活许可证并将其上载到Orchestrator
从销售支持团队或任何集中位置获得许可证代码后,我们需要按照给定步骤激活许可证并将其上传到Orchestrator:
- 必须在本地计算机上安装UiPath平台。
- 如果UiPath平台不可用,请安装它。
- 现在以管理员帐户的身份从本地计算机打开命令提示符。
- 在这里,我们可以使用命令cd c:\program files(x86)\UiPath Platform\UiPath手动更改安装路径的目录
- 要激活许可证,我们需要Regutil工具。如果此工具可用,则键入以下命令以通过命令行激活它:regutil activate /email=emailaddress /code=licensecode
- 现在使用以下命令将许可证信息导出到文件 regutil export-info /out_file=D:\license.txt
- 转到Orchestrator并单击“管理”选项。然后从下拉列表中选择“设置”页面:

- 当设置页面变得可见时,我们可以看到许可证选项卡,如前面的屏幕截图所示。单击许可证。然后在页面的许可证部分,我们可以看到我们可用的许可证,并提供上传选项。点击上传选项。
成功上传许可证后,导航到许可证信息,该信息是使用Regutil工具和上传方法创建的。在这里,可以检查每个机器人的许可证到期日期。每当我们将一个新的Robot连接到Orchestrator时,它就会消耗一个新许可证。
发布和管理更新
当我们成功地创建了一个可用于执行某些自动化的工作流时,它应该被发布。这是必要的,因为如果我们打开UiPath Studio并在每次需要时运行工作流,那么它将消耗大量时间,还需要人工参与。这不是自动化的正确方法。因此,我们发布了我们的工作流程,以便使用UiPath Robot或Orchestrator可以非常轻松地运行。有时,我们可能希望对之前发布的工作流程进行一些更改。为此,我们必须进行更改并再次发布,以便在Orchestrator上提供最新的工作流。此工作流也会更新到最新版本。
在本节中,我们将了解如何发布项目以及如何更新项目。
Packages
当项目从UiPath Studio发布到Orchestrator时,它们将成为包。单击“程序包”选项后,可以在“流程”页面上找到这些程序包。
已发布的软件包显示在以下屏幕截图中:

Orchestrator提供了从“程序包”页面更新、查看或删除程序包的功能。Orchestrator中的每个包都包含一个版本、发布日期及其描述。假设我们有一个包,并且我们想要对该包进行更改,比如说,我们已经从UiPath Studio向该包添加了一些新功能,并再次发布它。为了使用上传包的最新版本,我们可以从Packages页面查看该包,如前面的屏幕截图所示,然后它将显示该包的所有可用包版本。要更新版本,请选择您选择的版本,或单击“获取最新版本”以使用该软件包的最新上载版本:

在前面的屏幕截图中,用户可以查看和删除发布到Orchestrator的所有已发布包。
包版本可以有两种状态:
- 活动:当程序包版本处于活动模式时,表示该版本当前正在使用
- 非活动:如果程序包版本处于非活动状态,则表示该版本未使用
管理程序包
在Orchestrator服务器上创建包后,我们可以在“进程”页面的“包”选项卡中轻松查看它们。在这里,我们可以上传或删除程序包。
上传程序包
当我们将项目发布到编排服务器时,它会自动将包发送到服务器。如果我们愿意,我们也可以手动上传包。为此,Orchestrator提供了从本地计算机手动上载项目的功能。要上传包,我们需要按照给定的步骤:
- 导航到“进程”页面,选择“程序包”选项,然后单击“上载程序包”。窗口中将显示一个对话框,如以下屏幕截图所示:

- 现在单击BROWSE按钮并从本地机器中选择具有上载文件名称的包。
- 选择正确的程序包后,单击UPLOAD按钮,使程序包与程序包页面上的当前现有程序包一起可用。
删除程序包
当我们不再需要程序包时,我们可以很容易地将其删除。请确保流程未处于活动模式。我们可以选择我们的软件包,然后单击“删除”按钮。我们还可以通过从列表中选中一个或多个程序包,或单击remove ALL INACTIVE(删除所有不活动的程序包)选项卡删除所有不活跃的程序包,同时删除多个程序包包括:

总结
当我们接近本书的结尾时,让我们快速回顾一下所学内容。我们首先了解了RPA、其范围以及RPA可用的一些工具。然后,我们深入研究了有关UiPath及其组件的更多细节,并设置了UiPath Studio来训练您自己的机器人。在开始设计您的第一个机器人之前,您还了解了UiPathStudio的用户界。一旦足够舒适,我们就探索了UiPath的一个迷人方面,那就是录音。在第三章Sequence、Flowchart和Control Flow中,我们看到了工作流是如何构建的,以及UiPatd中可用的不同类型的项目在使用它们时以及如何使用它们序列、流程图和控制流,还向您介绍了活动以及如何手动拖放活动来创建我们的工作流,所有这些都在UiPath Studio提供的用户友好界面中!
在第4章至第7章中,我们深入了解了UiPath:我们了解了更多关于记录、数据操作、UiPath中的各种控件、提取、选择器、OCR数据抓取和屏幕抓取的信息。我们还阅读了各种可用的插件和辅助机器人。
这还不是全部;自动化之旅的一个重要方面是正确组织项目,并为处理异常做好准备。所有这些都在第8章异常处理、调试和日志记录”和第9章代码管理和维护”中进行了详细处理。
最后,教你如何部署你的机器人。从本书开头的新手,你现在已经足够熟练地开发和部署机器人了!您的自动化之旅已经开始!
-
相关阅读:
TypeScript必知三部曲(一)TypeScript编译方案以及IDE对TS的类型检查
配置中心微服务(Spring Cloud Config)
看一遍学会Vue结合axios使用mockjs
vue项目 H5 动态设置浏览器标题
自然语言处理从零到入门 自然语言理解NLU
DSPE-PEG-DBCO 磷脂-聚乙二醇-二苯并环辛炔供应 X-GF-0295-10k
【每日一题】找到出现了K次的数
Elastic:推出 7.16.2 和 6.8.22 版本的 Elasticsearch 和 Logstash 以升级 Apache Log4j2
NoSQL之 Redis配置与优化
LeetCode-1742. 盒子中小球的最大数量【哈希表,暴力】
- 原文地址:https://blog.csdn.net/mwjcxl/article/details/133440198