-
【python海洋专题八】Cartopy画地形水深图的contourf填充间隔数调整
【python海洋专题八】Cartopy画地形水深图的contourf填充间隔数调整
article
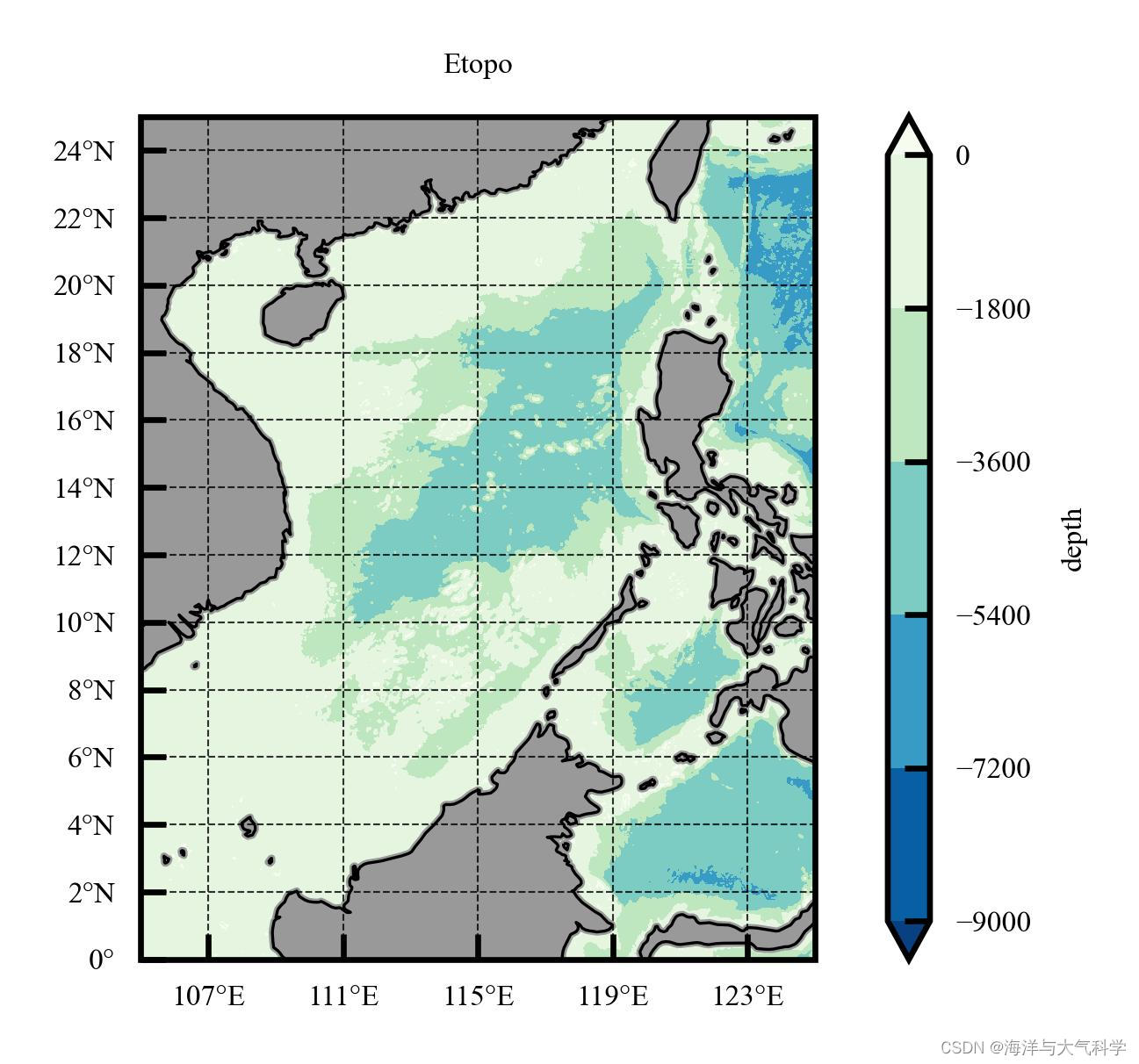
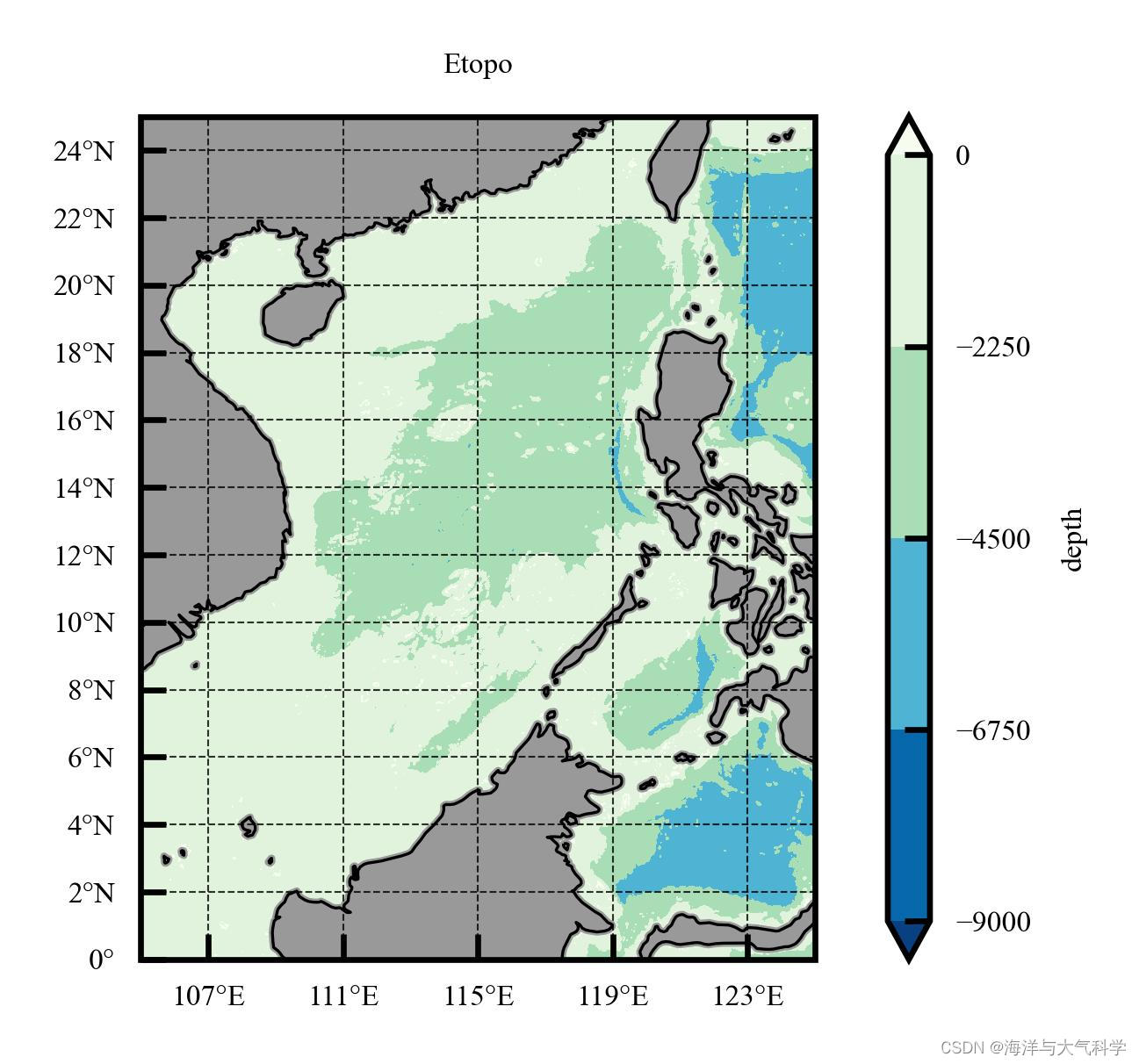
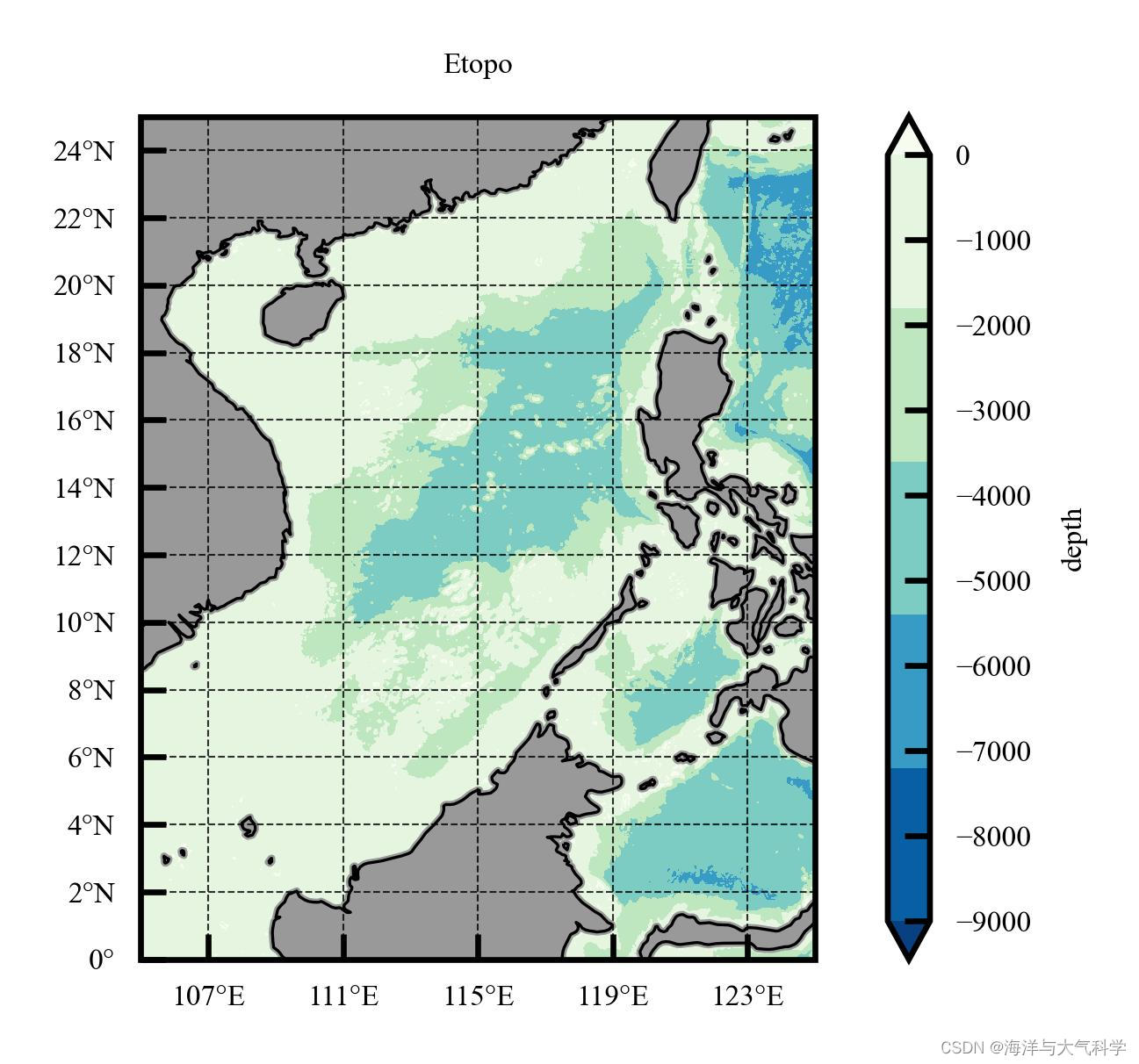
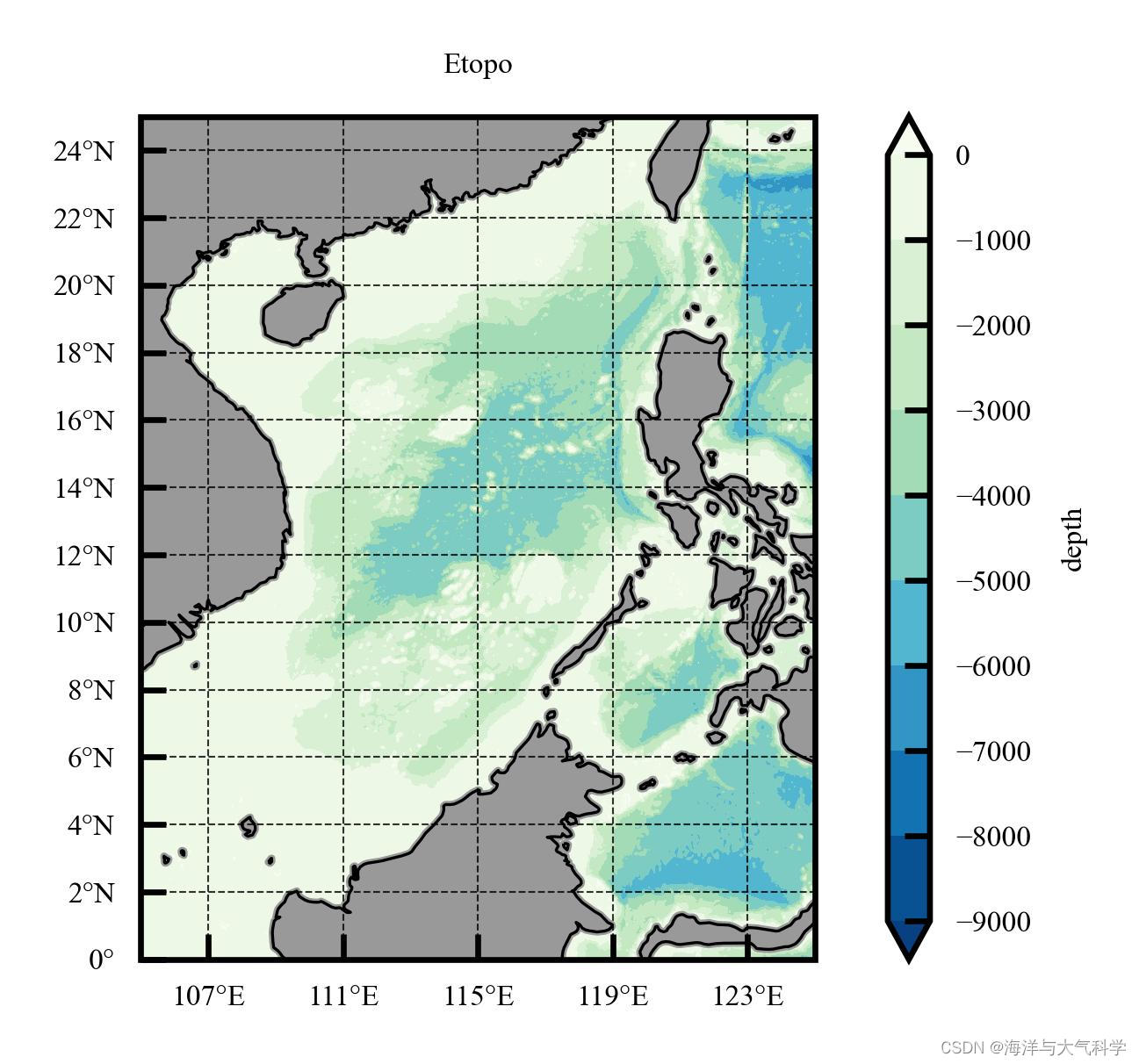
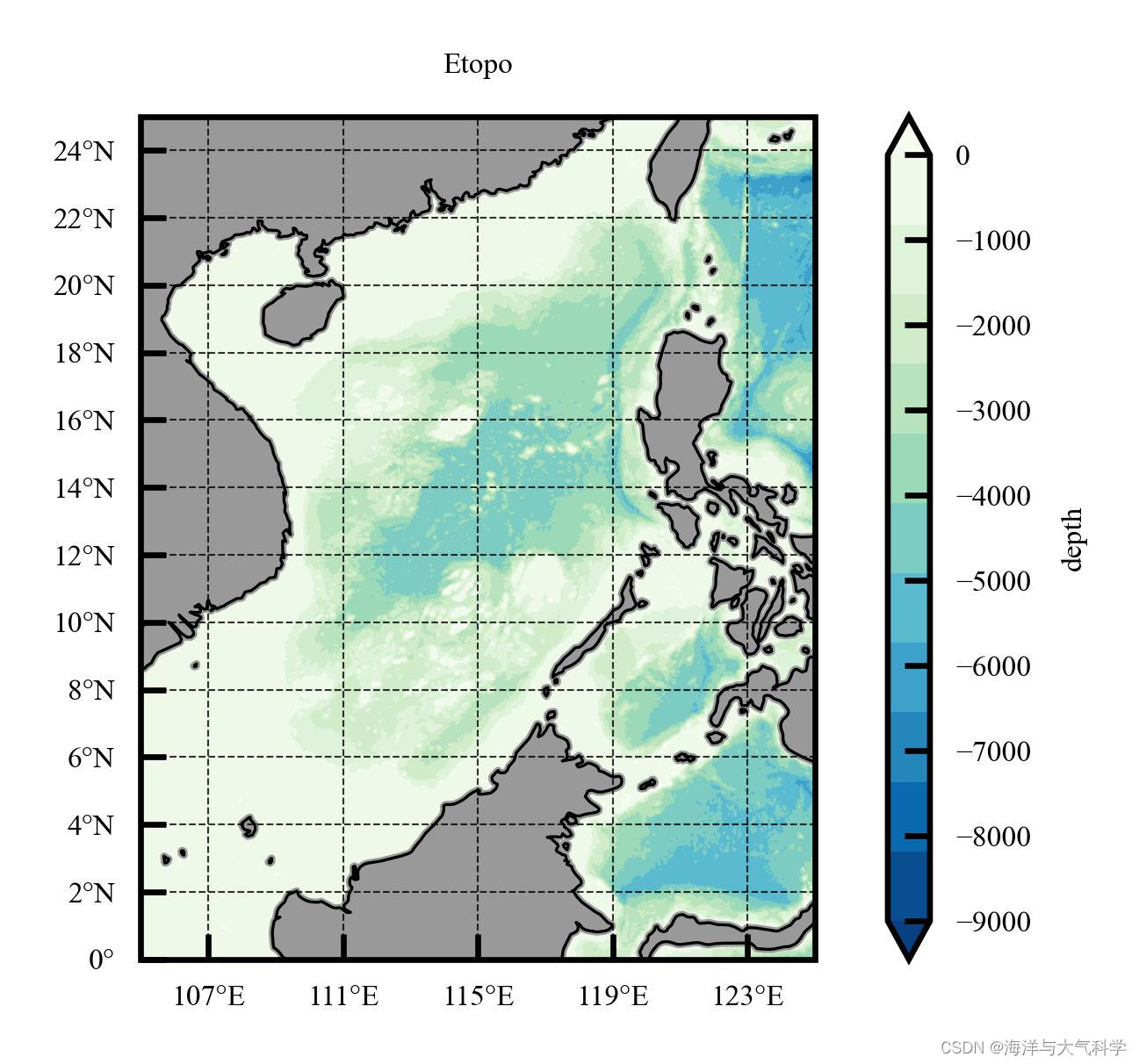
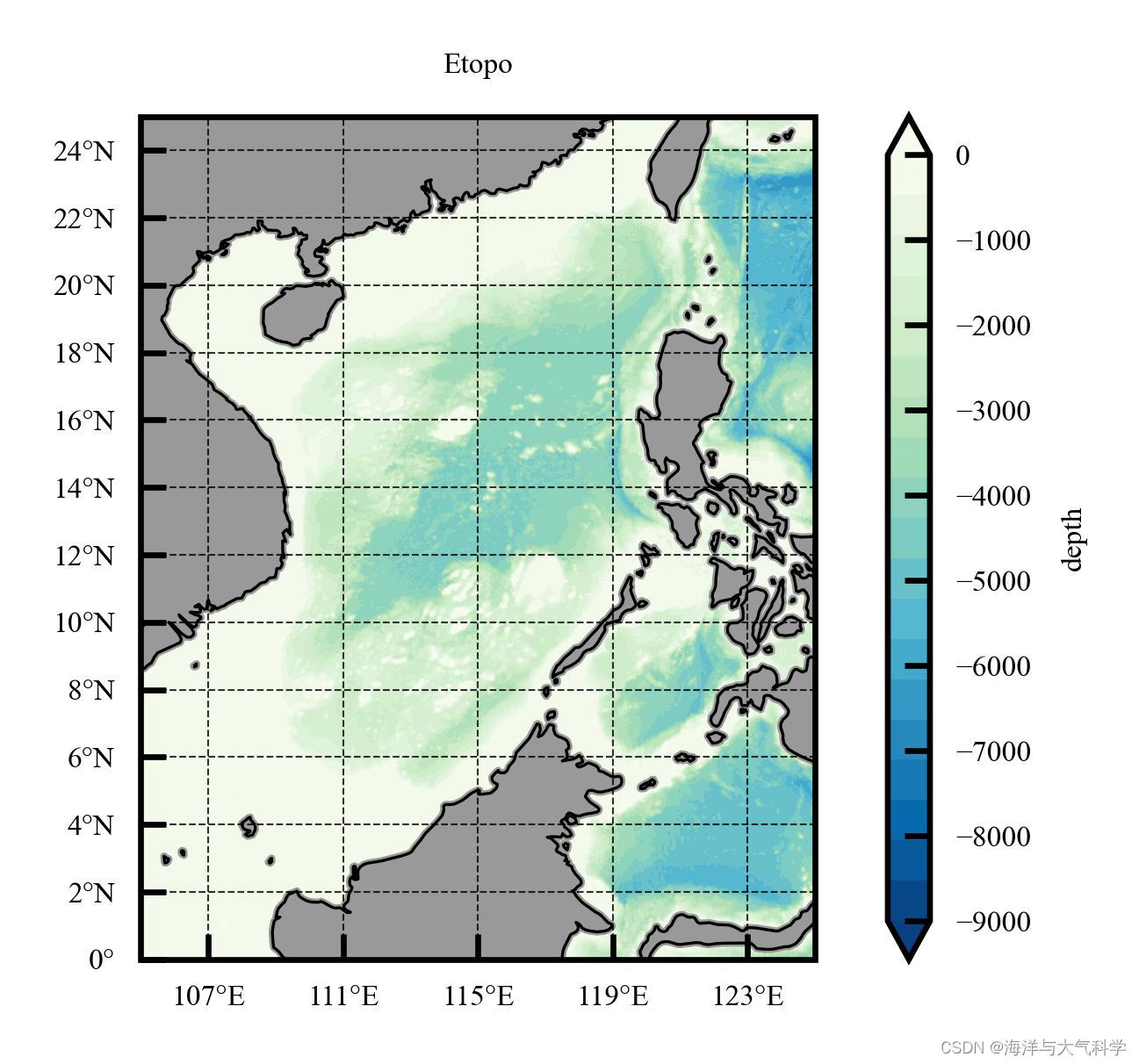
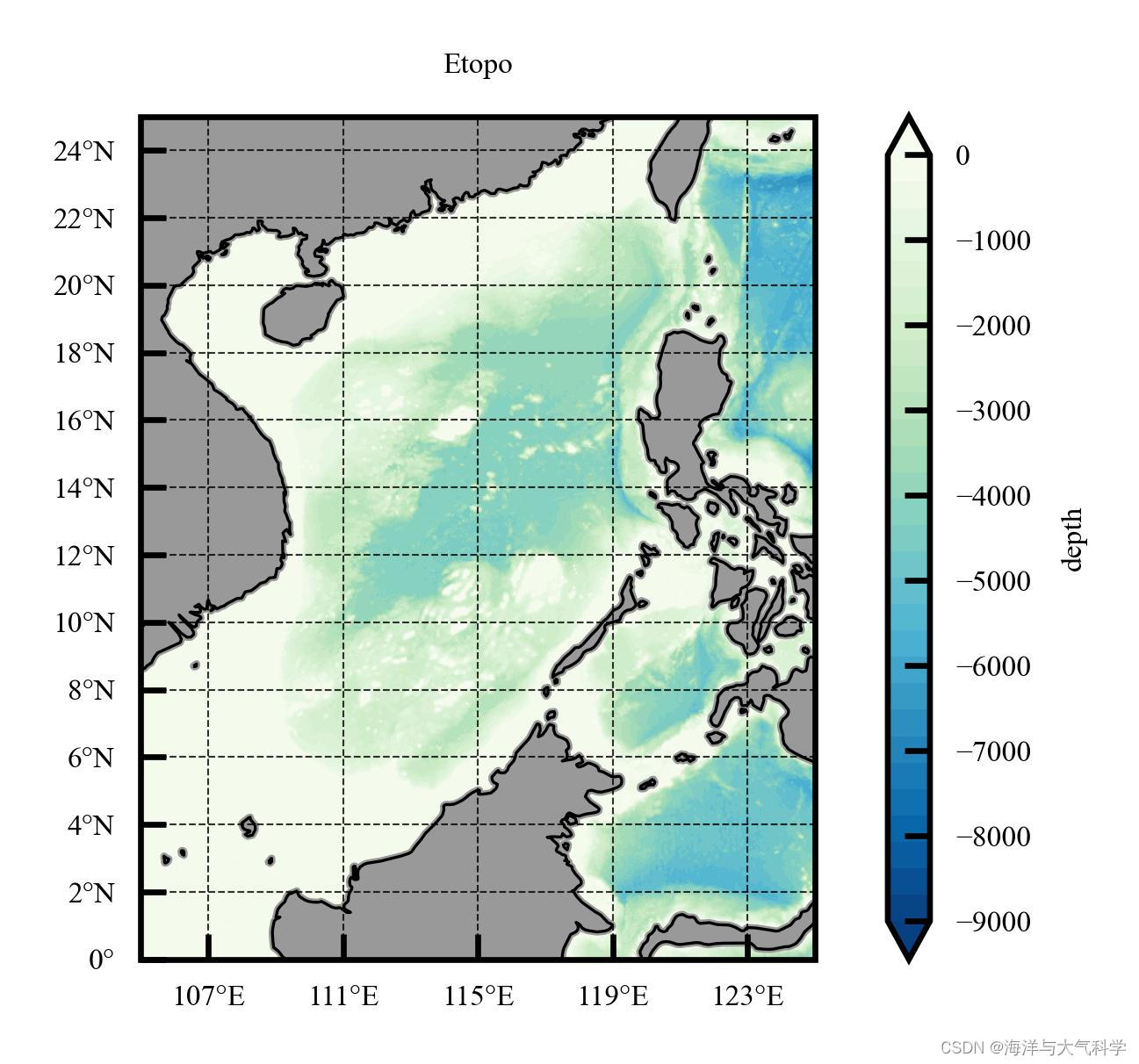
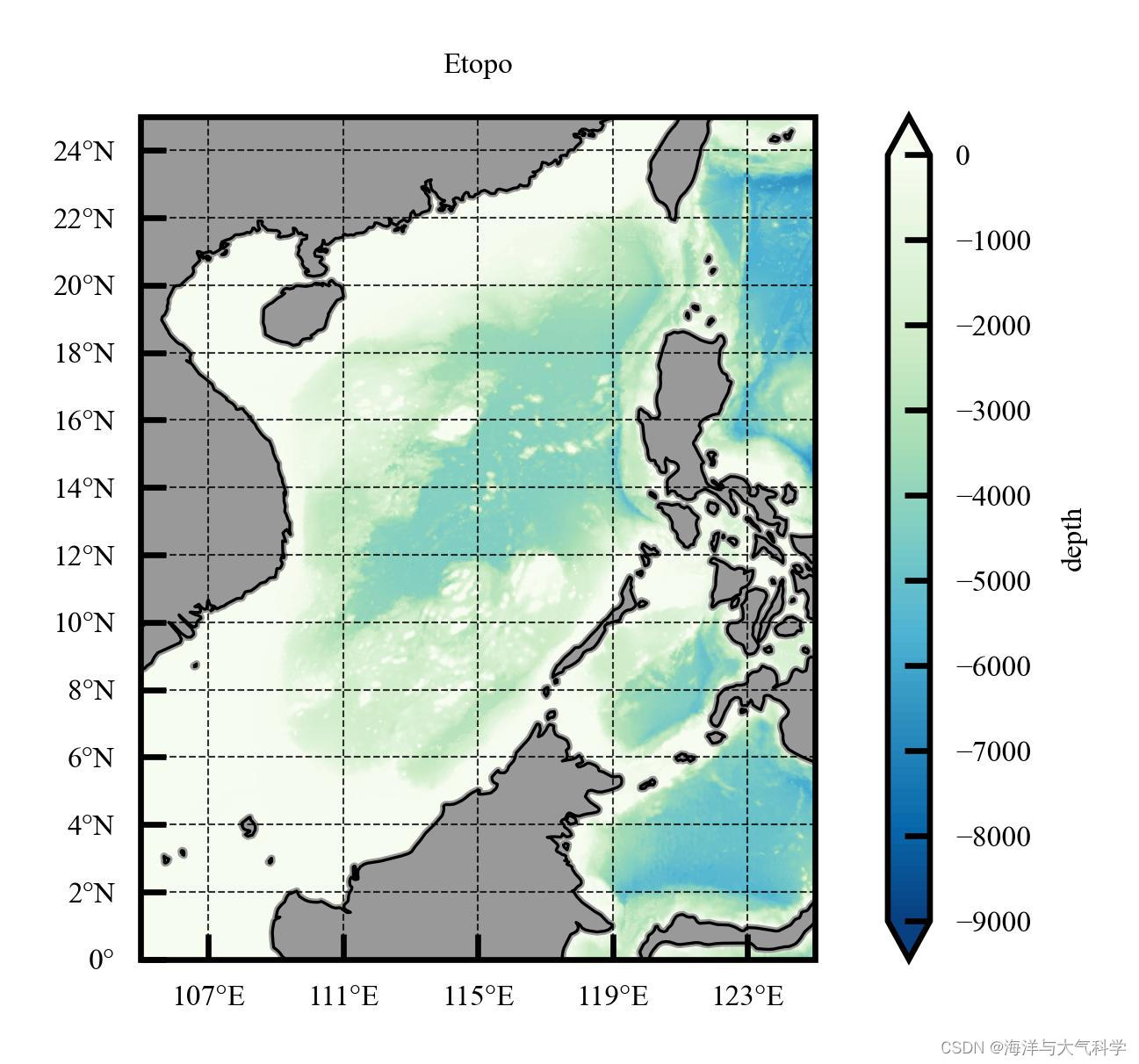
有时候想把contourf的画面变得更细此时,就需要增加填充间隔数
本期内容
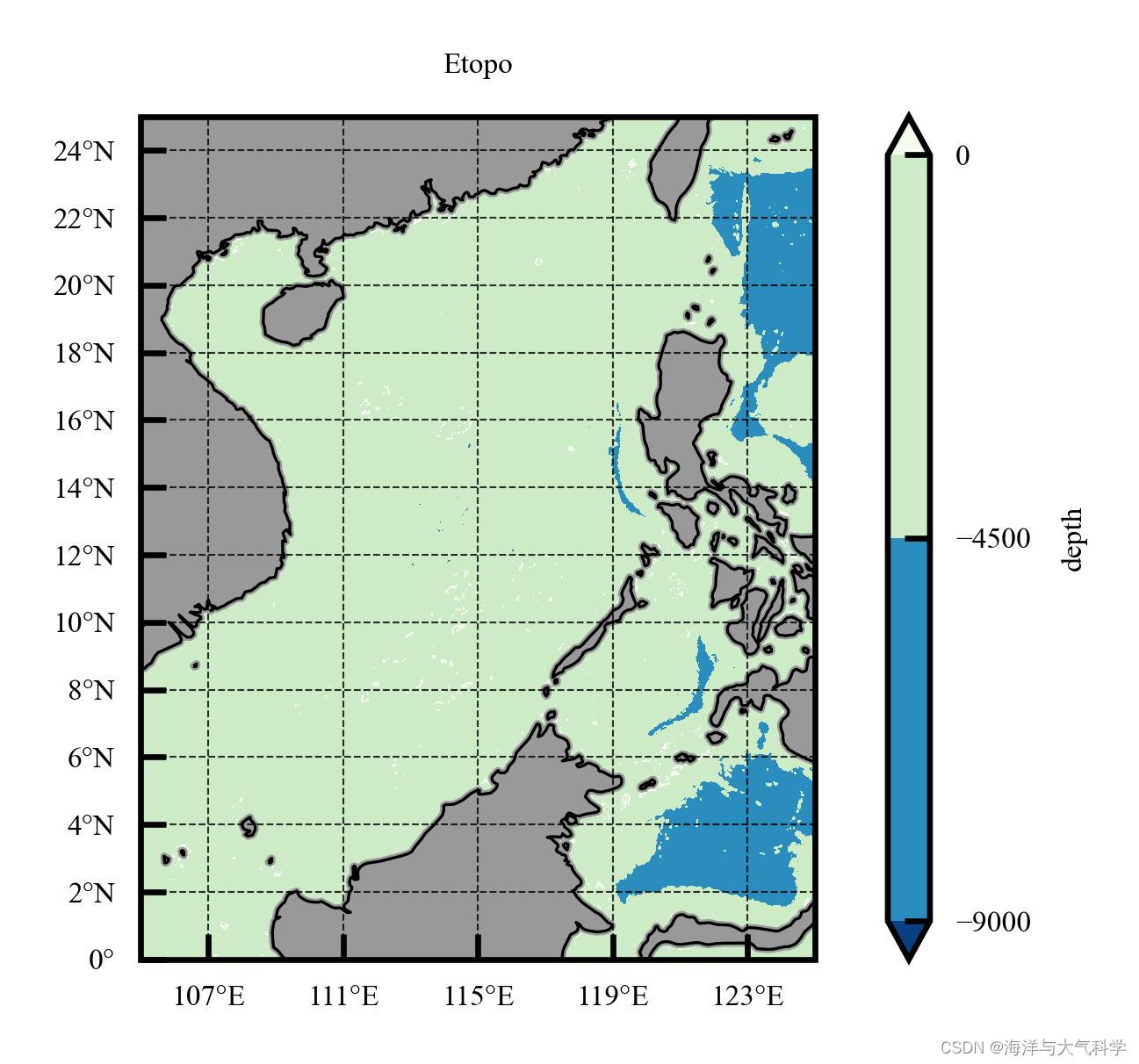
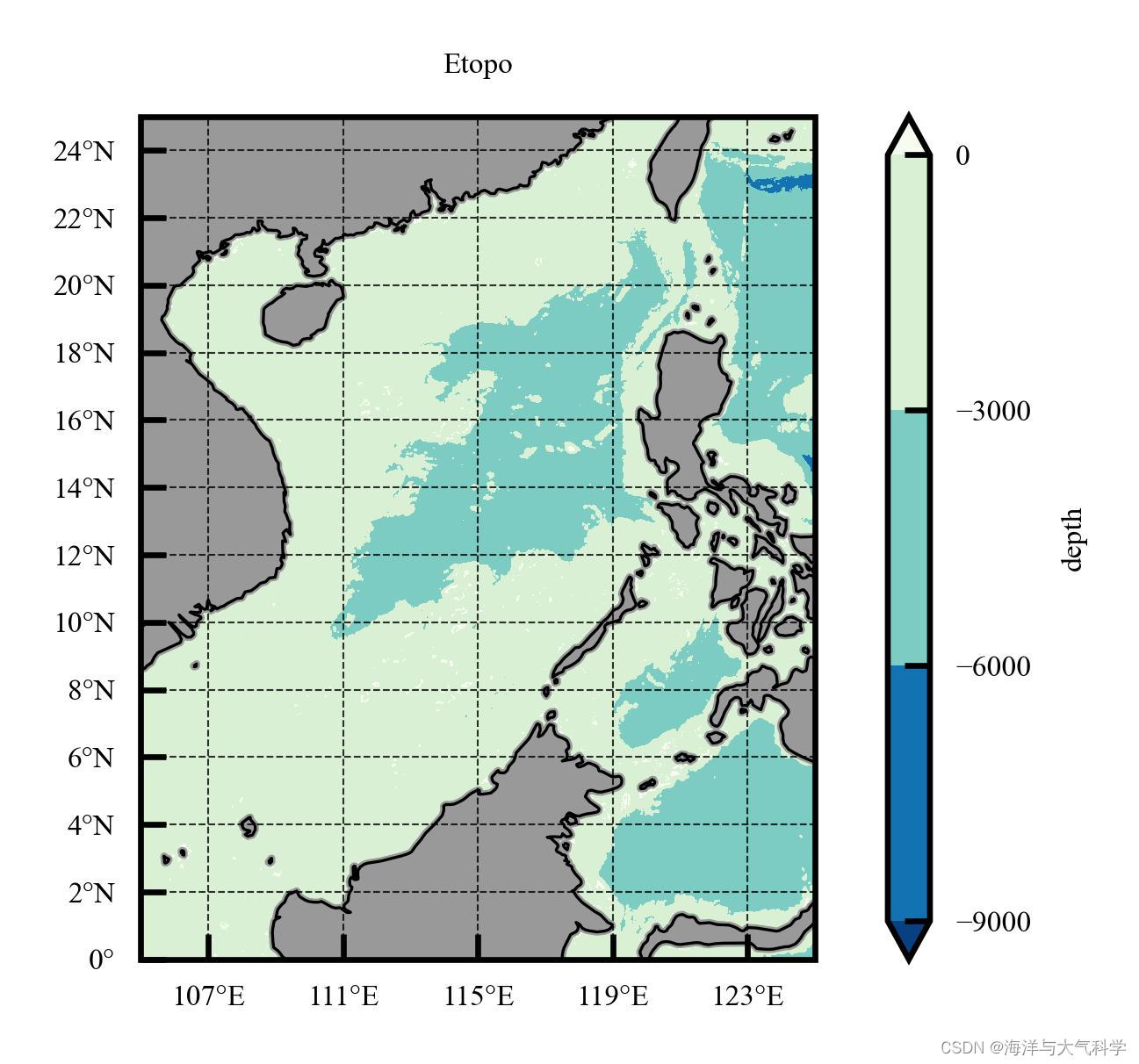
1:contourf的填充个数改变
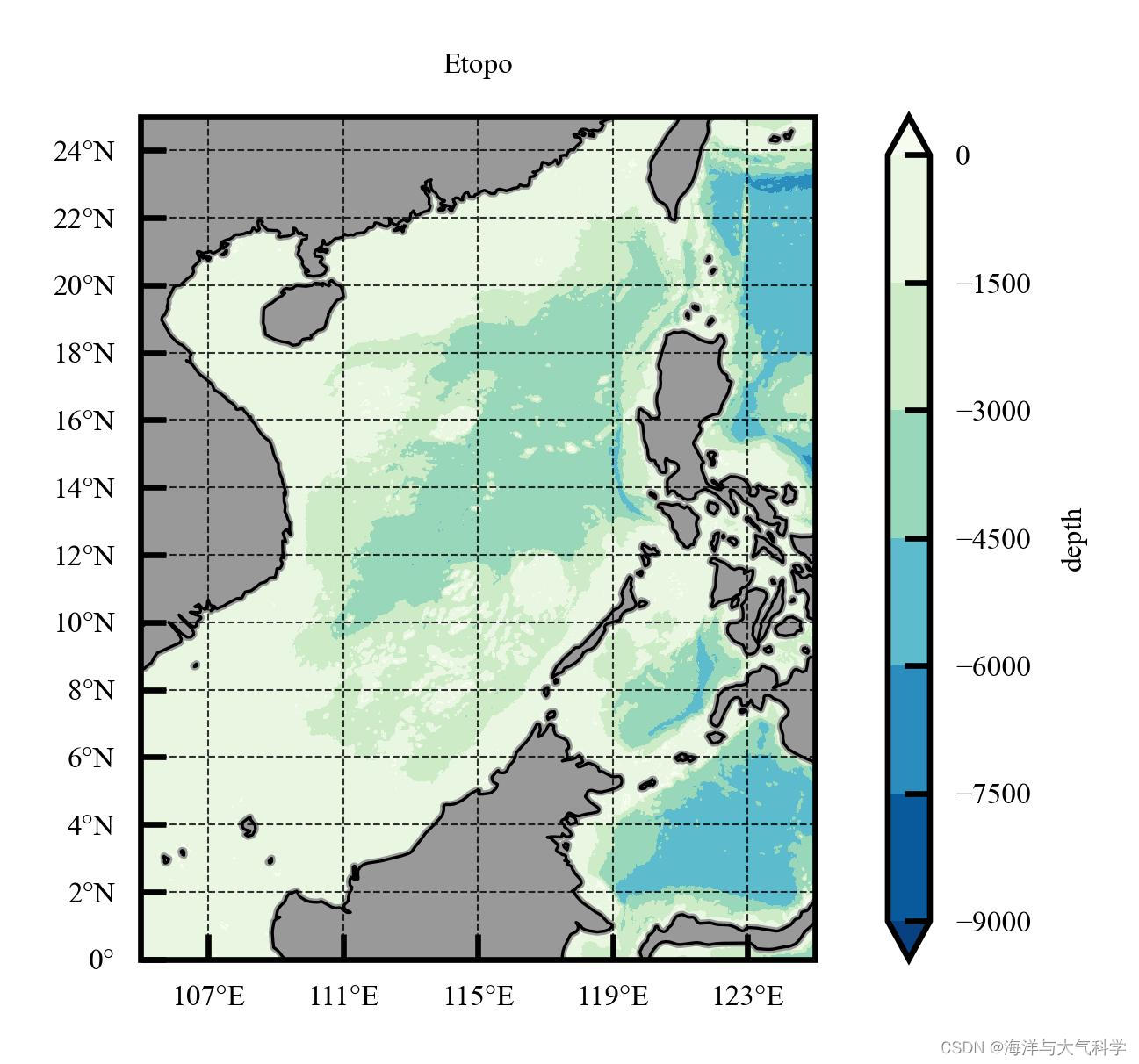
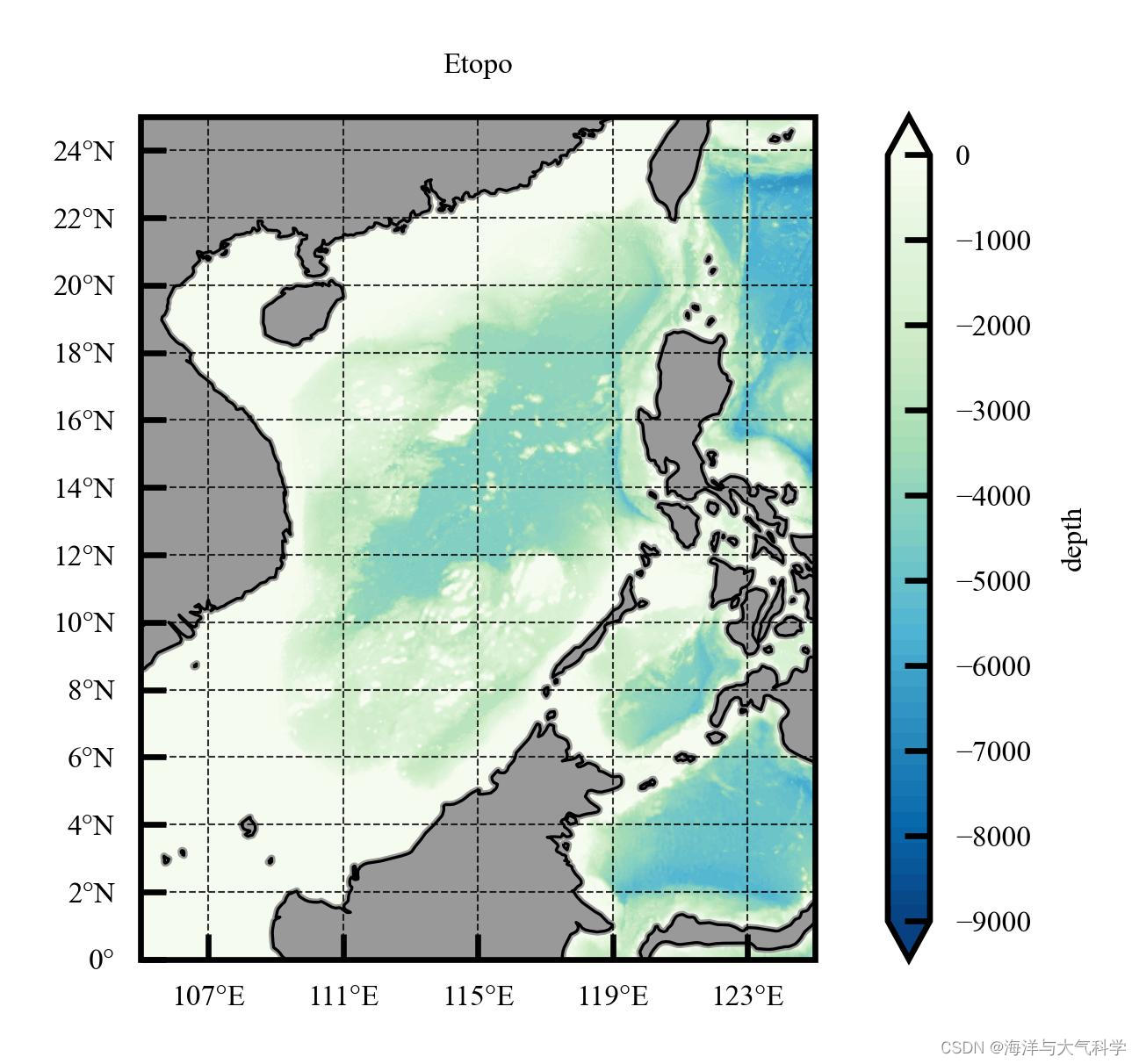
cf = ax.contourf(lon, lat, ele[:, :], levels=np.linspace(-9000,0,60),extend='both',cmap=cmap_r1, transform=ccrs.PlateCarree())- 1
levels=np.linspace(-9000,0,60):调整60即可,数字越大说明画的条数越多。自然填色越多。
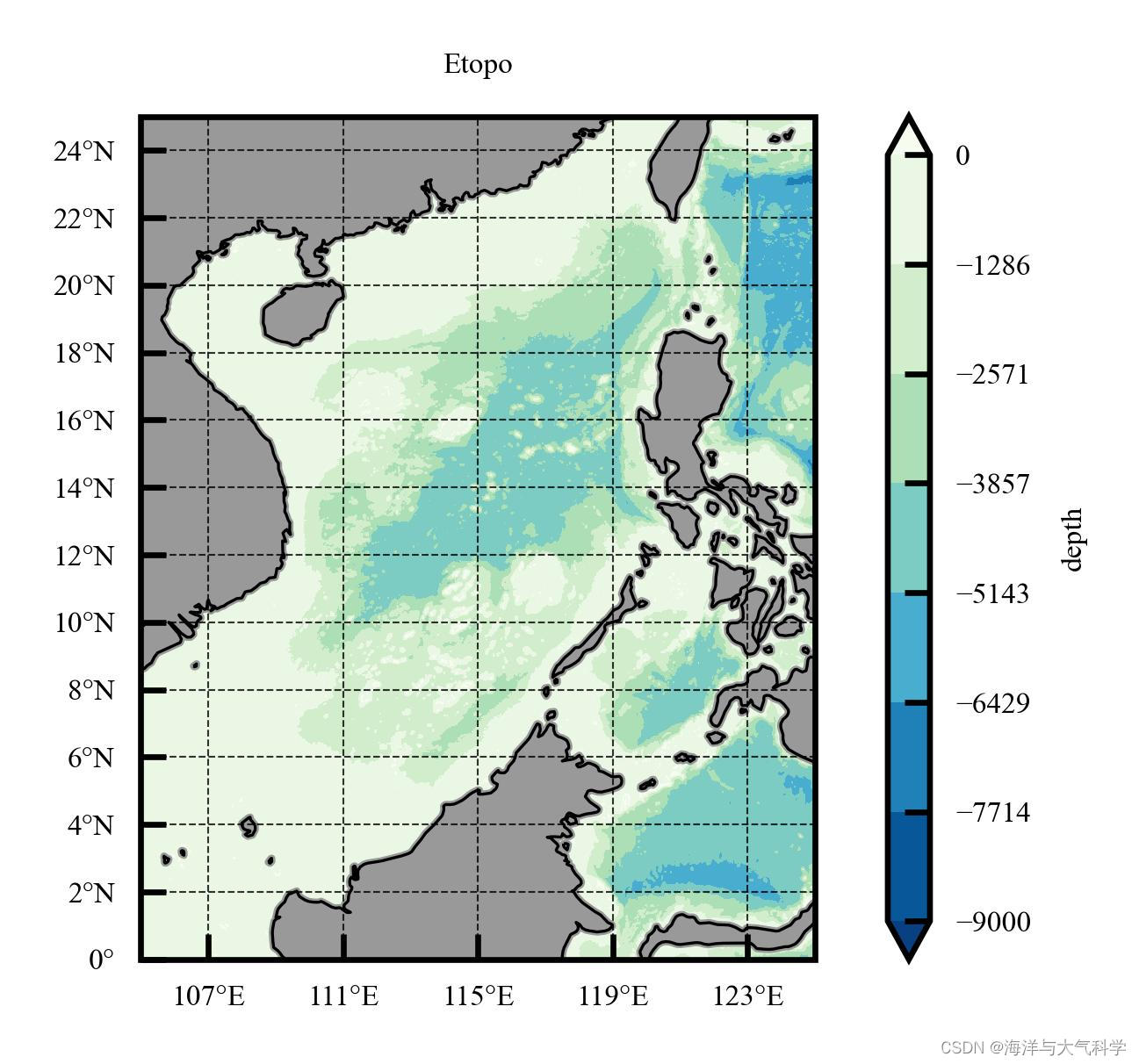
问题:
填色变密之后的colorbar设置也会随着改变。
解决
固定colorbar的刻度:
cb = plt.colorbar(cf, ax=ax, extend='both', orientation='vertical',ticks=np.linspace(-9000, 0, 10))- 1
【python海洋专题一】查看数据nc文件的属性并输出属性到txt文件
【python海洋专题二】读取水深nc文件并水深地形图
【python海洋专题三】图像修饰之画布和坐标轴【Python海洋专题四】之水深地图图像修饰
【Python海洋专题五】之水深地形图海岸填充
【Python海洋专题六】之Cartopy画地形水深图
【python海洋专题】测试数据
【Python海洋专题七】Cartopy画地形水深图的陆地填充
参考文献及其在本文中的作用
1:Matplotlib 系列:colorbar 的设置-CSDN博客
全文代码
1:# -*- coding: utf-8 -*- # %% # Importing related function packages import matplotlib.pyplot as plt import cartopy.crs as ccrs import cartopy.feature as feature import numpy as np import matplotlib.ticker as ticker from cartopy import mpl from cartopy.mpl.ticker import LongitudeFormatter, LatitudeFormatter from cartopy.mpl.gridliner import LONGITUDE_FORMATTER, LATITUDE_FORMATTER from matplotlib.font_manager import FontProperties from netCDF4 import Dataset from palettable.cmocean.diverging import Delta_4 from palettable.colorbrewer.sequential import GnBu_9 from palettable.colorbrewer.sequential import Blues_9 from palettable.scientific.diverging import Roma_20 from pylab import * def reverse_colourmap(cmap, name='my_cmap_r'): reverse = [] k = [] for key in cmap._segmentdata: k.append(key) channel = cmap._segmentdata[key] data = [] for t in channel: data.append((1 - t[0], t[2], t[1])) reverse.append(sorted(data)) LinearL = dict(zip(k, reverse)) my_cmap_r = mpl.colors.LinearSegmentedColormap(name, LinearL) return my_cmap_r cmap = Blues_9.mpl_colormap cmap_r = reverse_colourmap(cmap) cmap1 = GnBu_9.mpl_colormap cmap_r1 = reverse_colourmap(cmap1) cmap2 = Roma_20.mpl_colormap cmap_r2 = reverse_colourmap(cmap2) # read data a = Dataset('D:\pycharm_work\data\scs_etopo.nc') print(a) lon = a.variables['lon'][:] lat = a.variables['lat'][:] ele = a.variables['elevation'][:] # ele[ele > 0] = 0 # plot # 图三 # 设置地图全局属性 scale = '50m' plt.rcParams['font.sans-serif'] = ['Times New Roman'] # 设置整体的字体为Times New Roman fig = plt.figure(dpi=300, figsize=(3, 2), facecolor='w', edgecolor='blue')#设置一个画板,将其返还给fig ax = fig.add_axes([0.05, 0.08, 0.92, 0.8], projection=ccrs.PlateCarree(central_longitude=180)) ax.set_extent([105, 125, 0, 25], crs=ccrs.PlateCarree())# 设置显示范围 land = feature.NaturalEarthFeature('physical', 'land', scale, edgecolor='face', facecolor=feature.COLORS['land']) ax.add_feature(land, facecolor='0.6') ax.add_feature(feature.COASTLINE.with_scale('50m'), lw=0.4)#添加海岸线:关键字lw设置线宽;linestyle设置线型 cf = ax.contourf(lon, lat, ele[:, :], levels=np.linspace(-9000,0,6),extend='both',cmap=cmap_r1, transform=ccrs.PlateCarree()) # ------colorbar设置 cb = plt.colorbar(cf, ax=ax, extend='both', orientation='vertical',ticks=np.linspace(-9000, 0, 10)) cb.set_label('depth', fontsize=4, color='k')#设置colorbar的标签字体及其大小 cb.ax.tick_params(labelsize=4, direction='in') #设置colorbar刻度字体大小。 # 添加标题 ax.set_title('Etopo', fontsize=4) # 利用Formatter格式化刻度标签 ax.set_xticks(np.arange(107, 125, 4), crs=ccrs.PlateCarree())#添加经纬度 ax.set_xticklabels(np.arange(107, 125, 4), fontsize=4) ax.set_yticks(np.arange(0, 25, 2), crs=ccrs.PlateCarree()) ax.set_yticklabels(np.arange(0, 25, 2), fontsize=4) ax.xaxis.set_major_formatter(LongitudeFormatter()) ax.yaxis.set_major_formatter(LatitudeFormatter()) ax.tick_params(color='k', direction='in')#更改刻度指向为朝内,颜色设置为蓝色 gl = ax.gridlines(crs=ccrs.PlateCarree(), draw_labels=False, xlocs=np.arange(107, 125, 4), ylocs=np.arange(0, 25, 2), linewidth=0.25, linestyle='--', color='k', alpha=0.8)#添加网格线 gl.top_labels, gl.bottom_labels, gl.right_labels, gl.left_labels = False, False, False, False plt.savefig('scs_elevation20.jpg', dpi=600, bbox_inches='tight', pad_inches=0.1) # 输出地图,并设置边框空白紧密 plt.show() 图片- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
-
相关阅读:
Jmeter接口自动化(八)监听器
华为ensp搭建习题
美容院微信小程序怎么添加会员管理功能
【一周聚焦】 联邦学习 arxiv 2.16-3.10
spring和springmvc常用注解
paddle 44 用onnxruntime实现ppyoloe模型的部署(含python和c++版本),支持batchsize
线程中常用的锁
9 个对初学者开发者有价值的 GitHub 库✨
PAT 1059 Prime Factors(建立素数表)
Windows取证——隐藏术
- 原文地址:https://blog.csdn.net/miaobo0/article/details/133484542
