-
5自由度雄克机械臂仿真描点
5自由度雄克机械臂仿真描点

任务
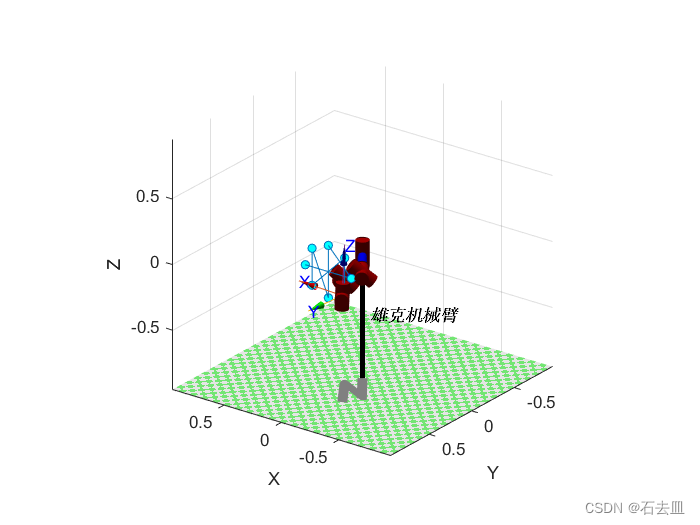
建立雄克机械臂的坐标系和D-H参数表,使用Matlab机器人工具箱(Robotics Toolbox),用机械臂末端执行器触碰8个红色的目标点。
代码
%% 机器人学 format compact close all clear clc %% DH参数 L1 = Link([ 0, 0, 0, 0, 0], 'modified'); L2 = Link([ 0, 0.35, 0, -pi/2, 0], 'modified'); L3 = Link([ 0, 0, 0, pi/2, 0], 'modified'); L4 = Link([ 0, 0.305, 0, -pi/2, 0], 'modified'); L5 = Link([ 0, 0, 0, pi/2, 0], 'modified'); L6 = Link([ 0, 0.3, 0, -pi/2, 0], 'modified'); L7 = Link([0 0 0 pi/2 0],'modified'); bot = SerialLink([L1 L2 L3 L4 L5 L6 L7], 'name', '雄克机械臂') b=isrevolute(L1); %% 齐次变换矩阵 R = 0.2; L=0.4; tar_posi = [ R,L,0;-R,L,0;0,L,R;0,L,-R; R*cos(pi/4), L, R*sin(pi/4); R*cos(pi/4), L, -R*sin(pi/4); -R*cos(pi/4), L, R*sin(pi/4); -R*cos(pi/4), L, -R*sin(pi/4)]; plot3(tar_posi(:,1),tar_posi(:,2),tar_posi(:,3),'Marker','o','MarkerFaceColor','c','MarkerSize',5); T = zeros(8,4,4); q = zeros(8,7); for(i=1:8) T(i,:,:) = transl(tar_posi(i,:)); end %% 关节角 q = zeros(9,7); q(1,:) = [0 0 0 0 0 0 0]; q(2,:) = bot.ikine(reshape(T(1,:,:),4,4),'q0',q(1,:)); q(3,:) = bot.ikine(reshape(T(2,:,:),4,4),'q0',q(2,:)); q(4,:) = bot.ikine(reshape(T(3,:,:),4,4),'q0',q(3,:)); q(5,:) = bot.ikine(reshape(T(4,:,:),4,4),'q0',q(4,:)); q(6,:) = bot.ikine(reshape(T(5,:,:),4,4),'q0',q(5,:)); q(7,:) = bot.ikine(reshape(T(6,:,:),4,4),'q0',q(6,:)); q(8,:) = bot.ikine(reshape(T(7,:,:),4,4),'q0',q(7,:)); q(9,:) = bot.ikine(reshape(T(8,:,:),4,4),'q0',q(8,:)); %% 轨迹规划 Time=0:0.05:2; for i = 1:8 tra=jtraj(q(i,:),q(i+1,:),Time); plot(bot,tra); end- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
结果
-
相关阅读:
最新AI创作系统源码ChatGPT网站源码V2.6.3/支持Midjourney绘画/支持OpenAI GPT全模型+国内AI全模型
Android-宝宝相册(第四次作业)
数据结构之线性表
Modbus调试软件使用教程
ET-B32C如何让屏幕常亮(屏幕不熄灭或待机状态)
【学习笔记04】认识npm
12.反射与动态代理
HTTP状态码504(Gateway Timeout)报错原因分析和解决办法
2022最新版-李宏毅机器学习深度学习课程-P50 BERT的预训练和微调
照着这个保姆级文档来,虚拟机装CentOS不再踩坑
- 原文地址:https://blog.csdn.net/m0_51738372/article/details/133439754
