-
雷达实测数据的信噪比
最近处理了一段时间的雷达实测数据,其中有一个很重要的指标就是信号的信噪比,信噪比定义很简单就是信号的功率除以噪声功率,一般取dB (其中如果分子分母是功率的话,那么公式为10log10(X),如果分子分母是幅度的话,公式为20log10(X)),但是在雷达实测数据中我们是不知道信号的功率和噪声的功率,这需要我们进行脉冲压缩后,峰值代表信号功率,剩下取一部分进行统计分析,得到噪声功率。
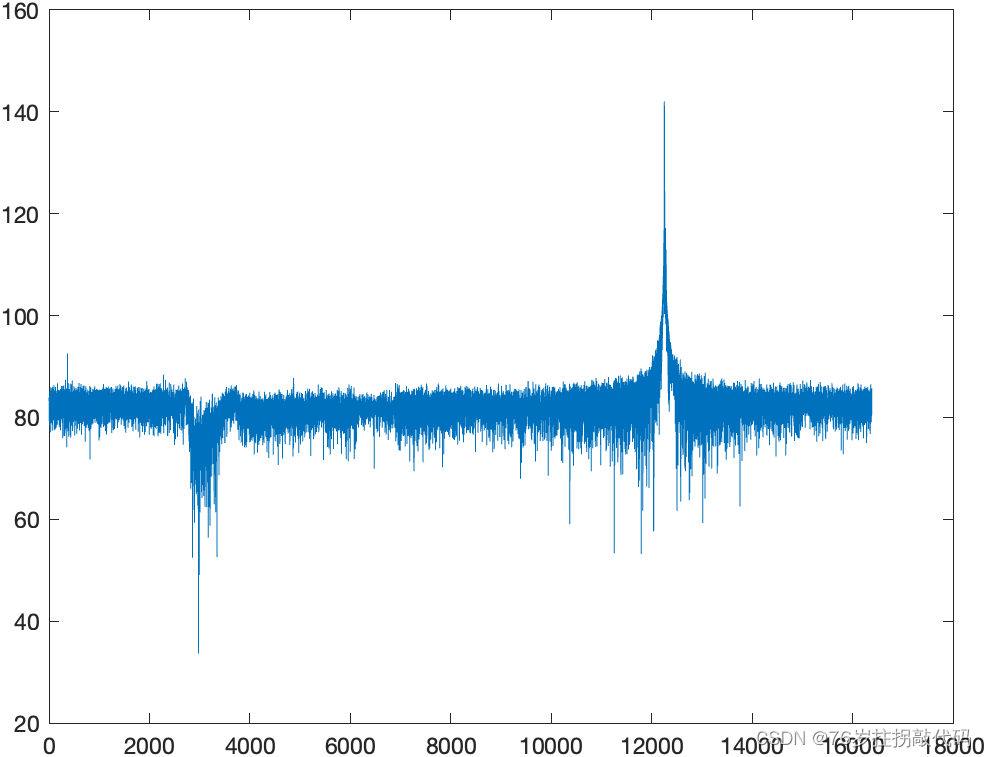
下面两张图分别是实测雷达信号图和脉压后信号图,我会把这两个文件传到资源中,大家可以自己尝试处理一下。


对脉压后的图像对数化,可得(方便大家看他的趋势):
 代码:
代码:- clc
- clear
- close all
- %% 数据读取与波形
- data = load('20230920-234830-slave-PRT1-data'); % 雷达实测信号
- data1 = load('20230920-234830-slave-PRT1-data1'); % 脉冲压缩后的信号
- figure,plot(real(data.data))
- figure,plot(abs(data1.data1))
- figure,plot(db(abs(data1.data1)))
- N = length(data1.data1); % 信号长度
- [~,N_max] = max(abs(data1.data1)); % 峰值坐标
- %% 功率
- s_pointer = N_max;
- s = sum(abs(data1.data1(s_pointer)).^2)/(length(s_pointer));
- n_pointer = [1:N_max-50,N_max+50:N];
- n = sum(abs(data1.data1(n_pointer)).^2)/(length(n_pointer));
- SNR = 10*log10((s-n)/n);
- %% 幅度
- s_pointer = N_max;
- s = sum(abs(data1.data1(s_pointer)))/(length(s_pointer));
- n_pointer = [1:N_max-50,N_max+50:N];
- n = sum(abs(data1.data1(n_pointer)))/(length(n_pointer));
- SNR = 20*log10(s/n);
其中功率算出来的SNR为:58.561761884213010;幅度算出来的SNR为:59.367852645436710,相差一个dB,推荐功率计算方法(即幅度平方)
注意:我之前认为在脉压图像中,除了信号区就是噪声区,这个其实是不对的,我们只需要从统计意义上,能够找到一个区域能代表噪声就好,我之前犯的错误就是噪声区里包含了部分信号的能量,导致SNR变小。
-
相关阅读:
ASP.NET Core MVC (core 3.1)拦截器
What Makes Pre-trained Language Models Better Zero-shot Learners?
适用于4×4MiMo 4G/5G,支持GNSS和WiFi 6E的车载天线解决方案
Android系统10 RK3399 init进程启动(四十) 开机自启动脚本init.rc执行逻辑框架
每日算法----464. 我能赢吗----2022/05/22
深度学习论文: Rethinking Mobile Block for Efficient Attention-based Models及其PyTorch实现
淘宝天猫店铺商品API,店铺商品分类接口代码对接教程
【左程云算法全讲11】贪心算法 & 并查集
聊聊设计模式——命令模式
峰会回顾 | 基于StarRocks,百草味如何通过数据赋能快消品行业
- 原文地址:https://blog.csdn.net/weixin_42664107/article/details/133438863