-
【ROS入门】实现参数服务器参数的增删改查操作
任务要求
实现参数服务器参数的增删改查操作
理论模型
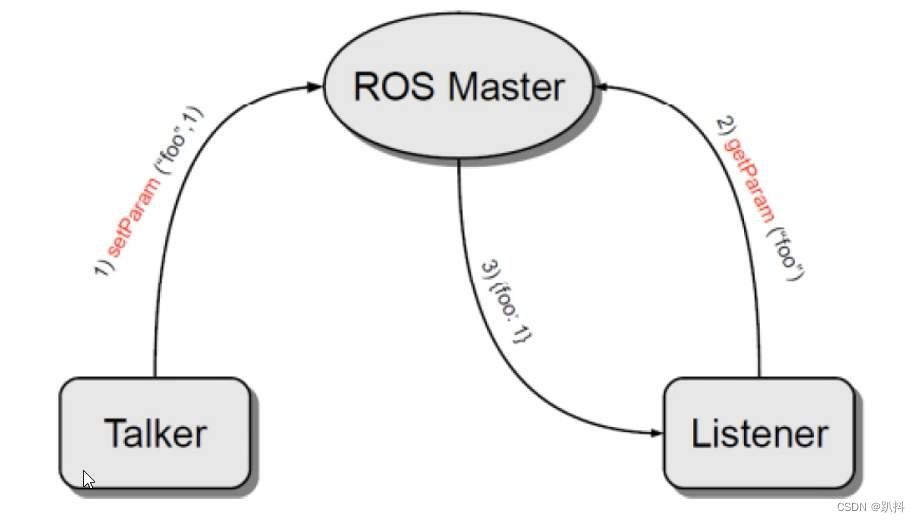
- Talker 通过 RPC 向参数服务器发送参数(包括参数名与参数值),ROS Master 将参数保存到参数列表中。
- Listener 通过 RPC 向参数服务器发送参数查找请求,请求中包含要查找的参数名。
- ROS Master 根据步骤2请求提供的参数名查找参数值,并将查询结果通过 RPC 发送给 Listener。
实现步骤
参数服务器新增/修改参数
支持整型,浮点型,字符串,布尔,vector,map等
#include "ros/ros.h" /* 需要实现参数的新增和修改 需求:首先设置机器人的共享参数,类型、半径 再修改半径 实现: ros::NodeHandle setParam("键", 值) ros::param set("键", 值) 修改只需要继续调用setParam或set函数,保证键是已经存在的,那么值会覆盖 */ int main(int argc, char *argv[]) { //初始化ROS节点 ros::init(argc,argv,"set_param_c"); //创建ROS节点句柄 ros::NodeHandle n; //参数增---------------------------------------------------- //方案1:n n.setParam("type","xiaoHuang"); n.setParam("radius",0.15); //方案2:ross::param ros::param::set("type_param","xiaoBai"); ros::param::set("radius_param",0.15); //参数改---------------------------------------------------- //方案1:n n.setParam("radius",0.2); //覆盖 return 0; ros::param::set("radius_param",0.25); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
当然别忘了在CMakeLists里头修改配置。
实现效果:
增加:
$ catkin_make $ source ./devel/setup.bash $ rosrun server_demo server_demo_set $ rosparam list $ rosparam get /type $ rosparam get /radius- 1
- 2
- 3
- 4
- 5
- 6
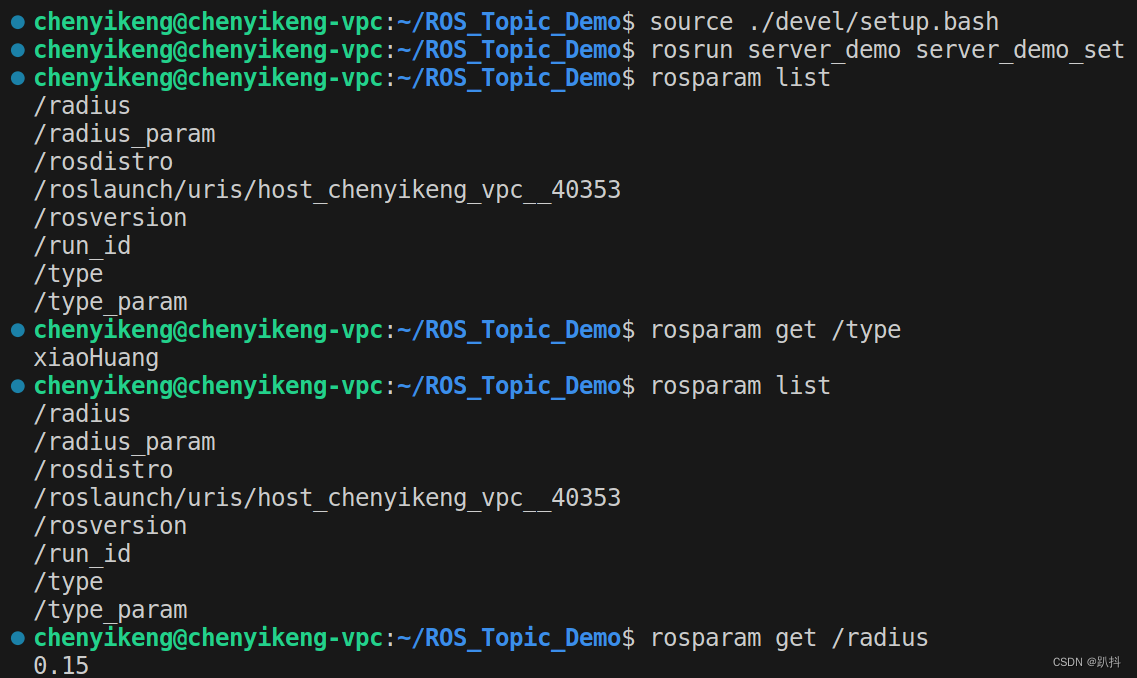
修改:$ rosparam get /radius- 1

可以看到参数radius已经修改过了参数服务器获取参数
#include "ros/ros.h" /* 实现参数的查询 */ int main(int argc, char *argv[]) { //设置编码 setlocale(LC_ALL,""); ros::init(argc,argv,"get_param_c"); ros::NodeHandle n; //ros::NodeHandle------------------------------ //1.param(键,默认值) //存在,返回对应结果,否则返回默认值 double radius = n.param("radius",0.5); ROS_INFO("radius = %.2f", radius); //2.getParam(键,存储结果的变量) //存在,返回 true,且将值赋值给参数2 //如果键不存在,那么返回值为 false,且不为参数2赋值 double radius2 = 0.0; bool result = n.getParam("radius2",radius2); if(result) ROS_INFO("获取的半径是: %.2f",radius2); else ROS_INFO("被查询的变量不存在"); //3.getParamCached(键,存储结果的变量)--提高变量获取效率 //存在,返回 true,且将值赋值给参数2 //如果键不存在,那么返回值为 false,且不为参数2赋值 double radius3 = 0.0; bool result2 = n.getParam("radius2",radius3); if(result2) ROS_INFO("获取的半径是: %.2f",radius3); else ROS_INFO("被查询的变量不存在"); //4.getParamNames(std::vector- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
参数服务器删除参数
#include "ros/ros.h" /* 演示参数删除 ros::NodeHandle delParam() ros::param del() */ int main(int argc, char *argv[]) { setlocale(LC_ALL,""); ros::init(argc,argv,"param_del_c"); ros::NodeHandle n; //删除:NodeHandle------------------------- bool flag1 = n.deleteParam("radius"); if(flag1) ROS_INFO("删除成功"); else ROS_INFO("删除失败"); //删除:ros::param------------------------- bool flag2 = ros::param::del("radius_param"); if(flag2) ROS_INFO("删除成功"); else ROS_INFO("删除失败"); return 0; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
-
相关阅读:
JS中的前后端交互技术ajax
多巴胺自律上瘾
GitLab搭建
从零开始:PRD产品需求文档怎么写
Linux-用户与用户组,权限
C专家编程 第6章 运行的诗章:运行时数据结构 6.13 只适用于高级学员阅读的材料
SpringBoot SpringBoot 原理篇 1 自动配置 1.17 自动配置原理【3】
Linux中断编程
U-Boot常用命令
智能小车—PWM方式实现小车调速和转向
- 原文地址:https://blog.csdn.net/PuddleRubbish/article/details/133305397