-
《计算机视觉中的多视图几何》笔记(11)
11 Computation of the Fundamental Matrix F F F
本章讲述如何用数值方法在已知若干对应点的情况下求解基本矩阵 F F F。
文章目录
- 11 Computation of the Fundamental Matrix F F F
- 11.1 Basic equations
- 11.2 The normalized 8-point algorithm
- 11.3 The algebraic minimization algorithm
- 11.4 Geometric distance
- 11.5 Experimental evaluation of the algorithms
- 11.6 Automatic computation of F F F
- 11.7 Special cases of F F F-computation
- 11.8 Correspondence of other entities
- 11.9 Degeneracies
- 11.10 A geometric interpretation of F F F-computation
- 11.11 The envelope of epipolar lines
- 11.12 Image rectification
11.1 Basic equations
基本矩阵定义如下:
x ′ T F x = 0 x'^{T} F x = 0 x′TFx=0
其中 x x x和 x ′ x' x′为两张图片中的任意一对对应点。
定义 x = ( x , y , 1 ) T \bold{x} = (x,y,1)^{T} x=(x,y,1)T, x ′ = ( x ′ , y ′ , 1 ) T \bold{x'} = (x',y',1)^{T} x′=(x′,y′,1)T。带入基本矩阵的定义并整理可以得到一个方程组,记为 A f = 0 Af = 0 Af=0。解析解: A A A的rank如果是8,那么直接求方程组的特解就可以。但是一般情况下有噪声,所以 A A A的rank有可能是9,那么就用SDV分解。可以表达成 A = U D V T A=UDV^{T} A=UDVT,那么 f f f就是 V V V的最后一列。

11.1.1 The singularity constraint
F F F是一个奇异矩阵,rank为2。利用这个性质,我们可以先用解析解求出一个 F F F,然后分解为 F = U D V T F=UDV^{T} F=UDVT,进一步写成 F = U d i a g ( r , s , t ) V T F=Udiag(r,s,t)V^{T} F=Udiag(r,s,t)VT,接着把 t t t换成0就可以了。利用解析解求 F F F的时候需要8组对应点,所以这个方法叫8点法。
11.1.2 The minimum case – seven point correspondences
求解 A f = 0 Af=0 Af=0,然后选基础解系中的两个特解 f 1 , f 2 f_1,f_2 f1,f2(书中叫零空间null space),然后构造一个方程 α f 1 + ( 1 − α ) f 2 \alpha f_1 + (1-\alpha )f_2 αf1+(1−α)f2,再利用 F F F是奇异矩阵的性质,得到 d e t ( α f 1 + ( 1 − α ) f 2 ) = 0 det(\alpha f_1 + (1-\alpha )f_2) = 0 det(αf1+(1−α)f2)=0,解这个方程就可以得到 α \alpha α。
11.2 The normalized 8-point algorithm
把8个点的质心平移到原点,把点看成一个向量,然后把向量模长归一化。
11.3 The algebraic minimization algorithm
优化目标:找到一个 F F F,使得 ∣ ∣ A f ∣ ∣ ||Af|| ∣∣Af∣∣最小,且满足 ∣ ∣ f ∣ ∣ = 1 ||f||=1 ∣∣f∣∣=1且 d e t F = 0 det F=0 detF=0。
步骤如下:
- 通过8点法找初始值 F 0 F_0 F0,然后找到 F 0 F_0 F0的零向量 e 0 e_0 e0
- 记
e
0
=
e
i
e_0 = e_i
e0=ei,通过
e
i
e_i
ei构造
E
i
E_i
Ei
E 0 = [ e 0 0 0 0 e 0 0 0 0 e 0 ] E_0 = \left[ \begin{matrix} e_0 & 0 & 0 \\ 0 & e_0 & 0 \\ 0 & 0 & e_0 \\ \end{matrix} \right] E0= e0000e0000e0 - 设 f i = E i m i f_i=E_i m_i fi=Eimi用P595的算法求解优化目标
- 计算误差 ϵ i = A f i \epsilon_i = A f_i ϵi=Afi
- 利用P600的Levenberg–Marquardt算法改变 e i e_i ei
- 重复1到5步直到算法收敛
11.4 Geometric distance
本节主要介绍如何用几何损失函数来计算基本矩阵。
11.4.1 黄金法则 (Gold Standard method)
我们假设图像噪声服从高斯分布,那么我们优化下式:
Σ i d ( x i , x ^ ) 2 + d ( x i ′ , x ^ ′ ) 2 \Sigma_i d(x_i,\hat{x})^2 + d(x_i^{'},\hat{x}^{'})^2 Σid(xi,x^)2+d(xi′,x^′)2x i ↔ x i ′ x_i \leftrightarrow x^{'}_i xi↔xi′是已知对应点。 x ^ , x ^ ′ \hat{x},\hat{x}^{'} x^,x^′是没有噪声的点。
优化步骤如下:
- 根据含有噪声的点 x i , x i ′ x_i,x'_i xi,xi′估计出一个初始的 F ^ \hat{F} F^
- 根据 F ^ \hat{F} F^求出 e ′ e^{'} e′(回忆基本矩阵定义 F = [ e ′ ] × P ′ P + F=[e']_{\times}P'P^{+} F=[e′]×P′P+),然后构造 P = [ I ∣ 0 ] , P ′ = [ [ e ′ ] × F ^ ∣ e ′ ] P=[I|0],P'=[[e']_{\times}\hat{F}|e^{'}] P=[I∣0],P′=[[e′]×F^∣e′]
- 根据 x i ↔ x i ′ x_i \leftrightarrow x'_i xi↔xi′ 还有 F ^ \hat{F} F^,用三角化求出空间点 X ^ \hat{X} X^
- 根据 X ^ \hat{X} X^有以下两式成立: x i ^ = P X ^ , x i ^ ′ = P ′ X ^ \hat{x_i} = P\hat{X}, \hat{x_i}' = P'\hat{X} xi^=PX^,xi^′=P′X^
- 把上两式带入优化目标
11.4.2 Parametrization of rank-2 matrices
非线性优化要求把 F F F参数化,下面介绍几种方法:
- Over-parametrization 把 F F F写成 F = [ t ] × M F=[t]_{\times}M F=[t]×M M是任意的 3 × 3 3 \times 3 3×3 矩阵
- Epipolar parametrization 把 F F F 第三列写成前两列的线性组合
- Both epipoles as parameters 参见书P286的11.8式
11.4.3 First-order geometric error (Sampson distance)
Sampson distance以 x ′ F x i = 0 x^{'} F x_{i}=0 x′Fxi=0为优化目标,将其写成:
( x ′ F x i ) 2 ( F x i ) 1 2 + ( F x i ) 2 2 + ( F x i ′ ) 1 2 + ( F x i ′ ) 1 2 \frac{(x^{'} F x_{i})^2}{(Fx_i)^2_1 + (Fx_i)^2_2 + (Fx^{'}_i)^2_1 + (Fx^{'}_i)^2_1} (Fxi)12+(Fxi)22+(Fxi′)12+(Fxi′)12(x′Fxi)2( F x i ) j 2 (Fx_i)^2_j (Fxi)j2 代表 F x i Fx_i Fxi的第 j j j个元素。
Symmetric epipolar distance
以 x ′ F x i = 0 x^{'} F x_{i}=0 x′Fxi=0为优化目标,那么我们可以让 x ′ x^{'} x′尽可能靠近 F x i F x_{i} Fxi.所以就有以下损失函数:
Σ d ( x ′ , F x i ) 2 + d ( x , F x i ′ ) 2 \Sigma d(x^{'},Fx_i)^2 + d(x,Fx_i^{'})^2 Σd(x′,Fxi)2+d(x,Fxi′)211.5 Experimental evaluation of the algorithms

本节选用3中不同的算法来进行对比:- 正则化的8点法
- 最小化代数误差
- 最小化几何误差
我们直接上结论:
- 不要使用没有正则化的8点法,换句话说,用8点法必须要把点的坐标正则化
- 8点法是最快最方便的
- 如果追求准确,用最小化代数误差
- 用Sampson distance也非常好
11.6 Automatic computation of F F F
使用RANSAC的算法
其步骤如下:-
先找出每幅图像中的特征点(SIFT, FAST, ORB)
-
计算特征点之间的对应
-
RANSAC采样:
- 任选7个点,用SVD解出一个 F F F
- 用 F F F和每一个点的坐标,计算一个距离 d ⊥ d_{\bot} d⊥. d ⊥ d_{\bot} d⊥可以选择重投影误差,或者Sampson。(多说一句,重投影误差就是指两次投影之间的差别,由于是同一个三维点的两次投影,这两次投影在理论上应该是一样的,所以误差应该为0.)
- 找出满足 d ⊥ < t d_{\bot} < t d⊥<t的点,其数量记为m,然后利用这些点重新计算 F F F,重复第二步,直到m足够多。
-
利用m对点,再选一个损失函数(比如说重投影和sampson),用Levenberg–Marquardt algorithm来优化这个损失函数
11.7 Special cases of F F F-computation
某些特殊的运动情况或部分已知的相机校准可以简化基本矩阵的计算。在每种情况下,基本矩阵的自由度数均小于一般运动情况下的7。我们举三个例子。
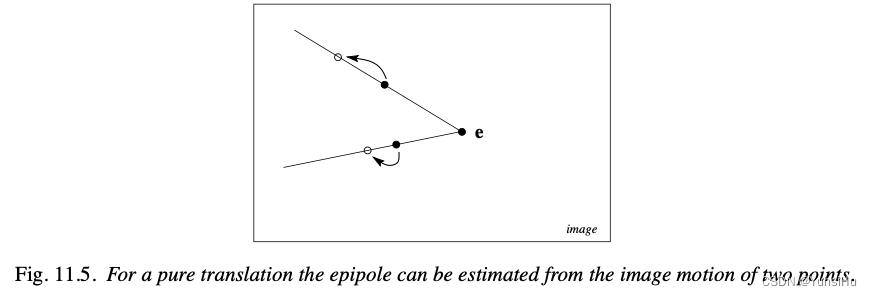
11.7.1 Pure translational motion
纯旋转情况下 F = [ e ′ ] × F = [e^{'}]_{\times} F=[e′]×这种情况下2对对应点就可以。
11.7.2 Planar motion
Planar motion意思是一个刚体沿着与某平面平行的方向( l s l_{s} ls)运动。在这种情况下 F F F满足 F = [ e ′ ] × [ l s ] × [ e ] × F=[e^{'}]_{\times} [l_{s}]_{\times} [e]_{\times} F=[e′]×[ls]×[e]×。
11.7.3 The calibrated case
如果相机已经标定了,那么我们可以在图像坐标系下计算本质矩阵 E E E,用 E E Ed代替 F F F,依旧是8点法。在E已知的情况下,把 E E E分解成 U D V T UDV^T UDVT,其中 D = d i a g ( a , b , c ) D = diag(a,b,c) D=diag(a,b,c),然后把 D D D换成 D ^ = d i a g ( ( a + b ) / 2 , ( a + b / 2 ) , 0 ) \hat{D} = diag((a+b)/2,(a+b/2),0) D^=diag((a+b)/2,(a+b/2),0),于是答案就是 E ^ = U D ^ V \hat{E} = U\hat{D}V E^=UD^V,知道了 E ^ \hat{E} E^和相机内参,就可以得出两个摄像机矩阵。
11.8 Correspondence of other entities
上文讲述的是我们用点对应的方法求解 F F F,本节我们介绍如何用其他对应方式来求解 F F F。
线段对应。线段对应不会给基本矩阵 F F F增加任何约束,因为线段重投影回去是平面,三维空间中平面一直会相交。
曲线对应。假设三维空间中有一条和极平面相切的曲线,该曲线投影在图像上的曲线一定和极线相切。这个性质就是一个约束:如果极线与图像中某曲线相切,则第二幅图像中对应的极线一定与某曲线相切。在这个结论里把曲线换成曲面也成立。
11.9 Degeneracies
退化的情况是指若干对对应点无法唯一确定基本矩阵 F F F,其具体细节如下:
定义 N N N为 A f = 0 Af=0 Af=0中 A A A的零空间,也就是该方程的特解。
补充一点基础知识:零空间的维度就是自由度。比如说解方程组 A f = 0 Af=0 Af=0的时候,方程的解里有3个自由变量,那么零空间的维数就是3( f f f本身是有9个变量)。
- dim(N) = 1,这种情况是对应点 n > 8 n>8 n>8,基本矩阵有唯一解
- dim(N) = 2,这种情况是对应点 n > 7 n>7 n>7,基本矩阵有1或3个解,主要会发生在对应点都落在某二次曲面上
- dim(N) = 3,这种情况是对应点 n > 6 n>6 n>6,基本矩阵有2个解系,主要会发生在两种情况:关于两个摄像机光心重合了,或者世界坐标中的点全部在一个平面上
11.10 A geometric interpretation of F F F-computation
几何解释就是 x ′ F x = 0 x'Fx = 0 x′Fx=0定义了四维空间中关于点 ( x , y , x ′ , y ′ ) (x,y,x',y') (x,y,x′,y′)的一个二次曲面。
11.11 The envelope of epipolar lines
基本矩阵的一个重要作用就是已知第一幅图中的某一点 x x x,找出第二幅图中该点对应的极线,那么第二幅途中 x x x的对应点 x ′ x^{'} x′肯定在极线上。如果我们考虑到噪声问题,那 x ′ x^{'} x′应该落在极线的附近。所以本节讲述如何用基本矩阵的协方差矩阵来决定 x ′ x^{'} x′的搜索区域。
我们直接上结论。 x x x代表一个点,对于基本矩阵 F F F,记其协方差矩阵 Σ F \Sigma_F ΣF, x x x对应的极线 l = F x l=Fx l=Fx, l l l的均值 m m m记为 l ˉ \bar{l} lˉ。
我们根据以上几项构建似然函数:
( l − m ) T Σ l ( l − m ) = k 2 (l-m)^T \Sigma_{l} (l-m) = k^2 (l−m)TΣl(l−m)=k2k k k是某一个常数。同时我们用 F 2 ( x ) F_2(x) F2(x)代表 χ 2 2 \chi_2^2 χ22 分布。我们只需要把 k 2 k^2 k2带入 χ 2 2 \chi_2^2 χ22 分布,就可以得到要搜索的点落在 C 代表的区域内的概率。C如下所示:
C = l ˉ l ˉ T − k 2 Σ 1 C=\bar{l} {\bar{l}}^T -k^2\Sigma_1 C=lˉlˉT−k2Σ111.11.1 Verification of epipolar line covariance
本节主要验证一下上一节介绍方法的有效性。先找出一些对应点,当成ground truth。然后给每个点加上高斯噪声,然后再计算一个 F F F,通过 F F F求出极线,并且用上一节方法计算ground truth落在 c c c中的概率。
11.12 Image rectification
校正的意思是说把两个图像旋转到同一个平面,这样就是一对双目立体图像,可以做双目立体匹配。校正分为以下几个部分。
11.12.1 Mapping the epipole to infinity
把极点映射到无穷远,如果两幅图的极点都映射到了无穷远,那么他们的极线就平行了。极点本来是 ( f , 0 , 1 ) (f,0,1) (f,0,1),无穷远处的点是 ( f , 0 , 1 ) (f,0,1) (f,0,1), 我们有以下矩阵可以做到这一点:
G = [ 1 0 1 0 1 0 − 1 / f 0 1 ] G=\left[ \begin{matrix} 1 & 0 & 1\\ 0 & 1 & 0\\ -1/f & 0 & 1 \\ \end{matrix} \right] G= 10−1/f010101
如果考虑任意一点 x 0 x_0 x0,那么 G G G应该变成 G R T GRT GRT。 T T T把 x 0 x_0 x0转换到原点, R R R把 e ′ e^{'} e′旋转到 ( f , 0 , 1 ) (f,0,1) (f,0,1)。
11.12.2 Matching transformations
在上一节我们把一个图像已经转选转了某一个角度 (矩阵 H H H做了这个事),使其极线平行与立体匹配的基线,接下来我们需要把另外一个图像也转一下 (矩阵 H ′ H^{'} H′做这事),使其极线也平行与基线。我们不是对第二幅图像重复上一节,而是寻找 H H H和 H ′ H^{'} H′的关系。该关系描述如下:
如果 l l lhe l ′ l^{'} l′是两幅图像中对应的极线,那么有下式成立: H − T l = H ′ − T l ′ H^{-T}l=H'^{-T}l' H−Tl=H′−Tl′( H H H如果是点变换 H − T H^{-T} H−T就是线变换)。根据该式我们有以下优化函数:
Σ i d ( H x i , H ′ x i ′ ) 2 \Sigma_{i} d(Hx_i,H'x'_{i})^2 Σid(Hxi,H′xi′)2同时, H H H和 H ′ H^{'} H′应当满足如下关系:
H = ( I + H ′ E ′ a T ) H ′ M H=(I+H^{'}E^{'}a^{T})H^{'}M H=(I+H′E′aT)H′M其证明参见P306。
如果我们考虑一个特殊的 H ′ H^{'} H′,它可以把 e ′ e^{'} e′变换到无穷远点 ( 1 , 0 , 0 ) T (1,0,0)^T (1,0,0)T,(上文提到的 H ′ H^{'} H′没有这个性质),那么 H H H和 H ′ H^{'} H′ 应该有如下性质:在已知 F = [ e ′ ] × M F=[e^{'}]_{\times}M F=[e′]×M的条件下, H = H A H 0 H=H_A H_0 H=HAH0, H 0 = H ′ M H_0=H^{'}M H0=H′M, H A H_A HA是一个仿射变换。
利用这个性质,我们做一点改写: X ^ ′ = H ′ X i ′ \hat{X}^{'} = H^{'}X_i^{'} X^′=H′Xi′, X i ^ = H 0 X i \hat{X_i} = H_0X_i Xi^=H0Xi,则优化目标可以变成:
Σ i d ( H A X i ^ , X i ′ ^ ) 2 \Sigma_i d(H_A\hat{X_i},\hat{X^{'}_i})^2 Σid(HAXi^,Xi′^)2接下来我们参数化,令 X i ^ = ( x i ^ , y i ^ , 1 ) \hat{X_i}=(\hat{x_i},\hat{y_i},1) Xi^=(xi^,yi^,1), X i ′ ^ = ( x i ′ ^ , y i ′ ^ , 1 ) \hat{X^{'}_i}=(\hat{x^{'}_i},\hat{y^{'}_i},1) Xi′^=(xi′^,yi′^,1),以上优化目标就变成了:
Σ i ( a x i ^ + b y i ^ + c − x i ′ ^ ) 2 + ( y i ^ − y ′ ^ ) \Sigma_i (a\hat{x_i}+b\hat{y_i}+c-\hat{x^{'}_i})^{2} + (\hat{y_i}-\hat{y^{'}}) Σi(axi^+byi^+c−xi′^)2+(yi^−y′^)
11.12.3 Algorithm outline
本节对算法本身做一个总体的描述:
- 找出至少7对对应点
- 计算基本矩阵 F F F和两个极点 e , e ′ e,e' e,e′
- 找出 H ′ H^{'} H′,该矩阵把 e ′ e' e′映射到 ( 1 , 0 , 0 ) T (1,0,0)^T (1,0,0)T
- 优化目标函数 Σ d ( H x i , H ′ x ′ ) \Sigma d(Hx_i,H'x') Σd(Hxi,H′x′)
- 利用 H H H和 H ′ H' H′分别将两幅图像转换
11.12.4 Affine rectification
如果摄像机本身可以本仿射摄像机近似,那么就直接用仿射变换来校正,把上文的基本矩阵换成仿射相机的基本矩阵就可以。
-
相关阅读:
写一篇nginx配置指南
FPGA project : volt
操作系统课后习题
windows server2016 配置JDK环境
如何用python写 翻译腔?天哪~这实在是太有趣了~
Python下sensor_msgs.msg.PointCloud2数据的高效读取
C++设计模式(工厂方法模式)
代码随想录算法训练营第23期day2 | 977.有序数组的平方 、209.长度最小的子数组、59.螺旋矩阵II
淘宝sku API接口实例代码
class MultiScaleRoIAlign(nn.Module):
- 原文地址:https://blog.csdn.net/YuhsiHu/article/details/133254431