-
驱动开发:STM32F7控制AD5663模拟量输出
AD5663是ADI公司的一款DAC模块,用以实现两路模拟量信号输出。该芯片通过SPI通信来驱动。下面讲解使用STM32F7主控芯片来控制AD5663模拟量输出的流程。
配置STM32F7 SPI通信管脚
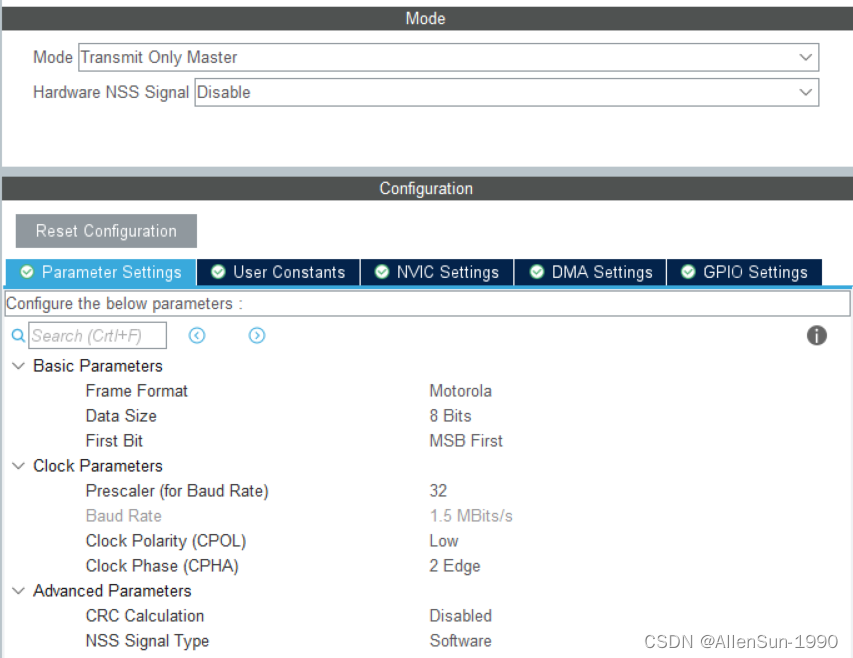
STM32CubeMX生成SPI驱动代码
- /* SPI3 init function */
- void MX_SPI3_Init(void)
- {
- /* USER CODE BEGIN SPI3_Init 0 */
- /* USER CODE END SPI3_Init 0 */
- /* USER CODE BEGIN SPI3_Init 1 */
- /* USER CODE END SPI3_Init 1 */
- hspi3.Instance = SPI3;
- hspi3.Init.Mode = SPI_MODE_MASTER;
- hspi3.Init.Direction = SPI_DIRECTION_2LINES;
- hspi3.Init.DataSize = SPI_DATASIZE_8BIT;
- hspi3.Init.CLKPolarity = SPI_POLARITY_LOW;
- hspi3.Init.CLKPhase = SPI_PHASE_2EDGE;
- hspi3.Init.NSS = SPI_NSS_SOFT;
- hspi3.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_32;
- hspi3.Init.FirstBit = SPI_FIRSTBIT_MSB;
- hspi3.Init.TIMode = SPI_TIMODE_DISABLE;
- hspi3.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
- hspi3.Init.CRCPolynomial = 7;
- hspi3.Init.CRCLength = SPI_CRC_LENGTH_DATASIZE;
- hspi3.Init.NSSPMode = SPI_NSS_PULSE_DISABLE;
- if (HAL_SPI_Init(&hspi3) != HAL_OK)
- {
- Error_Handler();
- }
- /* USER CODE BEGIN SPI3_Init 2 */
- /* USER CODE END SPI3_Init 2 */
- }
AD5663驱动代码开发
头文件io.h
- #ifndef __IO_H__
- #define __IO_H__
- #ifdef __cplusplus
- extern "C" {
- #endif
- /* Includes ------------------------------------------------------------------*/
- #include "gpio.h"
- /* USER CODE BEGIN Includes */
- /* USER CODE END Includes */
- /* USER CODE BEGIN Private defines */
- /* USER CODE END Private defines */
- /* USER CODE BEGIN Prototypes */
- /*ÃüÁÒå*/
- #define Write_to_Input_Register 0x000000
- #define Update_DAC_Register 0x080000
- #define Software_LDAC 0x100000
- #define WriteTo_Update_DAC_Channel 0x180000
- #define Power_Down 0x200000
- #define RESET 0x280000
- #define LDAC_Register_Setup 0x300000
- #define Reference_Set 0x380000
- /*µØַģʽ,Ñ¡ÔñDACͨµÀ*/
- #define DAC_Channel_A 0x000000
- #define DAC_Channel_B 0x010000
- #define DAC_Channel_All 0X070000
- //FOR POWER DOWN
- #define NORMAL 0X00
- #define K1Ohm 0X10
- #define K100Ohm 0X20
- #define ThreeState 0X30
- #define PDACA 0X01
- #define PDACB 0X02
- typedef enum
- {
- AOUT1 = 0,
- AOUT2 = 1,
- } AOUT_NAME;
- extern void IO_Initialize(void);
- extern void Set_AOUT_Level(AOUT_NAME aout, uint16_t level);
- extern void IO_Function_Test(void);
源文件io.c
- #include
- #include "io.h"
- #include "spi.h"
- #include "usart.h"
- /*Global variables*/
- uint16_t Aout1, Aout2;
- static void AD5663_PowerDown(void)
- {
- uint32_t inputShiftData = 0;
- uint8_t SendSPIByte[3];
- inputShiftData = Power_Down| NORMAL | PDACA | PDACB;
- SendSPIByte[0] = inputShiftData>>16;
- SendSPIByte[1] = inputShiftData>>8;
- SendSPIByte[2] = inputShiftData;
- HAL_GPIO_WritePin(DA_SYNC_GPIO_Port, DA_SYNC_Pin, GPIO_PIN_RESET);
- HAL_SPI_Transmit(&hspi3, SendSPIByte, sizeof(SendSPIByte), 100);
- HAL_GPIO_WritePin(DA_SYNC_GPIO_Port, DA_SYNC_Pin, GPIO_PIN_SET);
- }
- void IO_Initialize(void)
- {
- AD5663_PowerDown();
- }
- void Set_AOUT_Level(AOUT_NAME aout, uint16_t level)
- {
- uint32_t inputShiftData = 0;
- uint8_t SendSPIByte[3];
- if(aout == AOUT1)
- {
- Aout1 = level;
- inputShiftData = WriteTo_Update_DAC_Channel | DAC_Channel_A | level;
- }
- else if(aout == AOUT2)
- {
- Aout2 = level;
- inputShiftData = WriteTo_Update_DAC_Channel | DAC_Channel_B | level;
- }
- SendSPIByte[0] = inputShiftData>>16;
- SendSPIByte[1] = inputShiftData>>8;
- SendSPIByte[2] = inputShiftData;
- HAL_GPIO_WritePin(DA_SYNC_GPIO_Port, DA_SYNC_Pin, GPIO_PIN_RESET);
- HAL_SPI_Transmit(&hspi3, SendSPIByte, sizeof(SendSPIByte), 100);
- HAL_GPIO_WritePin(DA_SYNC_GPIO_Port, DA_SYNC_Pin, GPIO_PIN_SET);
- }
- void IO_Function_Test(void)
- {
- Set_AOUT_Level(AOUT1, 0x8000);
- Set_AOUT_Level(AOUT2, 0xEFFF);
- }
-
相关阅读:
使用Mybatis-plus清空表数据
Unity UnityWebRequest 带用户名密码
[python] 使用 Selenium 和 chromedirver 抓取网页
「Vue3系列」Vue3简介及安装
k8s配置集ConfigMap详解
ORB-SLAM
iMazing兼容Win和Mac2023免费版iOS设备管理器
中文核心论文写作经验总结和工具推荐
【机器学习】Q-Learning算法:在序列决策问题中的实践与探索
1688平台商品详情api接口
- 原文地址:https://blog.csdn.net/xikangsoon/article/details/133278308