-
FastestDet:比yolov5更快!更强!全新设计的超实时Anchor-free目标检测算法(附源代码下载)...
关注并星标
从此不迷路
计算机视觉研究院


公众号ID|ComputerVisionGzq
学习群|扫码在主页获取加入方式
计算机视觉研究院专栏
作者:Edison_G
本篇文章转自于知乎——qiuqiuqiu,主要设计了一个新颖的轻量级网络!
代码地址:https://github.com/dog-qiuqiu/FastestDet
01
概述
FastestDet是设计用来接替yolo-fastest系列算法,相比于业界已有的轻量级目标检测算法如yolov5n, yolox-nano, nanoDet, pp-yolo-tiny, FastestDet和这些算法压根儿不是一个量级,FastestDet无论在速度还是参数量上,都是要小好几个数量级的(不要在拿int8的模型和我fp32的模型比体积了,不公平),但是精度自然而然也比不过。FastestDet是针对计算资源紧缺的ARM平台设计的,突出单核效能,因为在实际业务场景中,不会把所有CPU资源都给推理框架做模型推理的,假如说你想在例如树莓派, RK3399, RK3568去跑实时目标检测,那么FastestDet是比较好的选择,或者移动端上不想占用太多cpu资源,也可以去用单核并设置cpu sleep去推理FastestDet,在低功耗的条件下运行算法。
02
新框架算法
先说下FastestDet的几个重要特性:
单轻量化检测头
anchor-free
跨网格多候选目标
动态正负样本分配
简单的数据增强
下面我就一个个去详细讲下吧:
单轻量化检测头
这个是对网络结构上对算法模型进行优化,主要是提升算法运行速度,简化后处理步骤,大家可以先看下这块的网络结构:

其实多检测头设计的是为了适应检测不同尺度物体目标,高分辨率的检测头负责检测小物体,低分辨的检测头负责检测大物体,一种分而治之的思想。
我个人觉得根因在于感知野,不同尺度的物体所需要的感知野是不同的,而模型每层的感知野都是不一样的,包括FPN也是对不同感知野特征的汇总融合。这块单检测头我也是参考的YOLOF的思想,在网络结构中,采用类似inception的5x5分组卷积并行网络结构,期待能融合不同感知野的特征,让单个检测头也能适应检测不同尺度的物体。
Anchor-Free
原先的anchor-base算法在训练模型都需要对数据集进行anchor-bias的运算,anchor-bias可以理解为对数据集中标注物体的宽高进行聚类,得到一组先验宽高,网络在这组先验宽高的基础上去优化预测框的宽高。FastestDet采用的是anchor-free算法,模型是直接回归gt于特征图宽高的scale值的,是没有先验宽高。这种方法可以简化模型后处理。而且对于anchor-base算法每个特征图的特征点是对应N个anchor候选框的,而这种anchor-free每个特征图的特征点只对应一个候选框,所以在推理速度上也是有优势的。
跨网格多候选目标
这块还是借鉴了yolov5,不单单只把gt中心点所在的网格当成候选目标,还把附近的三个也算进行去,增加正样本候选框的数量,如下图所示:

动态正负样本分配
所谓的动态正负样本分配其实就是在模型训练过程去动态分配正负样本,这是有别于以前yolo-fastest的,原先yolo-fastest的anchor-bias设置好以后, 通过计算anchor-bias与gt宽高的scale,对scale卡固定阈值分配正负样本(参考yolov5的做法),而anchor-bias和gt在训练过程中都是不变的,所以正负样本分配在训练过程中也是不变的。
而在FastestDet的正负样本分配参考的ATSS,通过设置预测框与GT计算的SIOU的均值作为分配正负样本的阈值,假如当前预测框与GT的SIOU阈值大于均值,那么为正样本,反之异然。(为什么没有参考simota?那是因为在构建cost矩阵时,不同loss的权重还得调超参,懒的调了)
简单的数据增强
对于轻量级的模型数据增强要慎重,本来学习能力差,脑子不怎么好使,上来给难题做可不拉跨,所以采用简单的数据增强如随机平移和随机缩放,并没有采用moscia和Mixup。
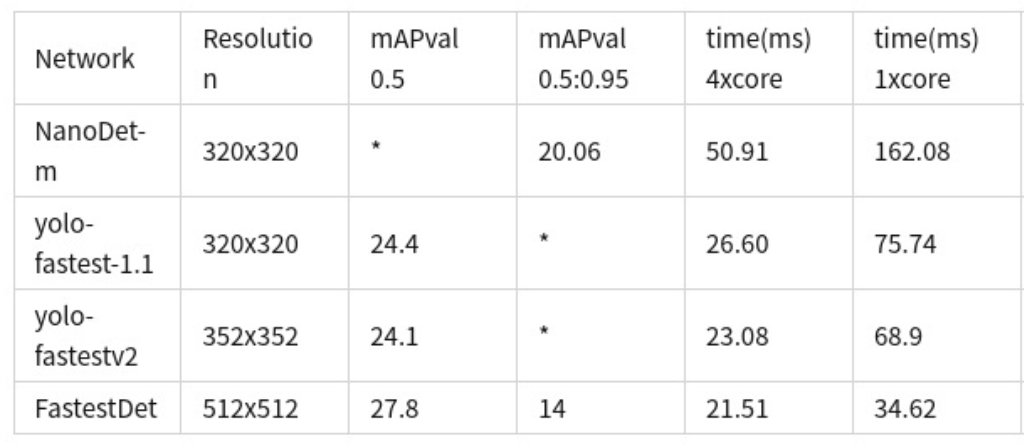
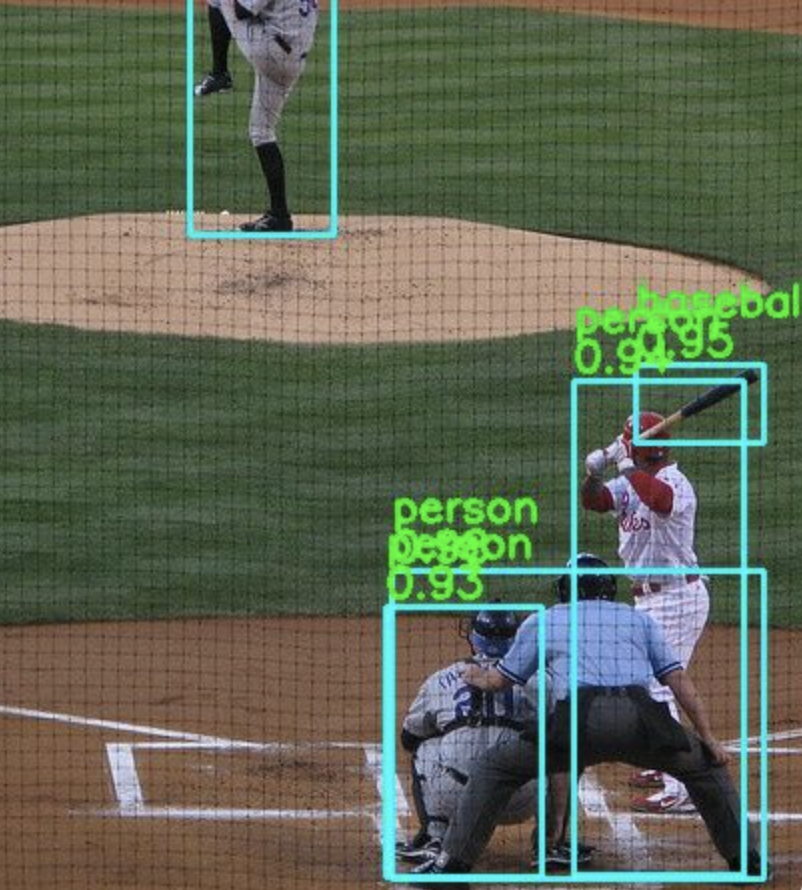
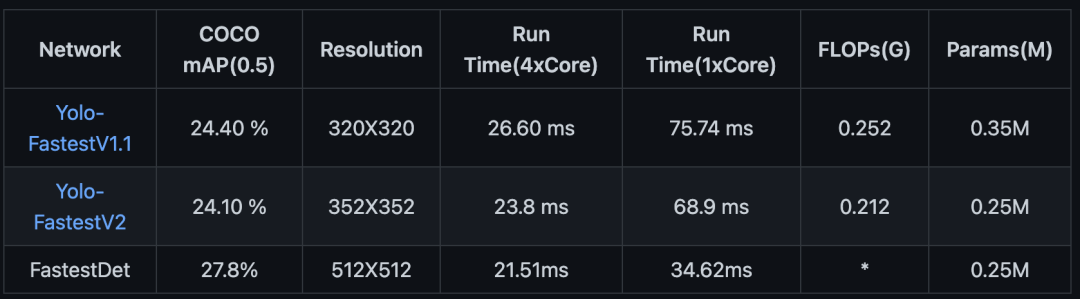
03
实验结果


© THE END
转载请联系本公众号获得授权

计算机视觉研究院学习群等你加入!
ABOUT
计算机视觉研究院
计算机视觉研究院主要涉及深度学习领域,主要致力于人脸检测、人脸识别,多目标检测、目标跟踪、图像分割等研究方向。研究院接下来会不断分享最新的论文算法新框架,我们这次改革不同点就是,我们要着重”研究“。之后我们会针对相应领域分享实践过程,让大家真正体会摆脱理论的真实场景,培养爱动手编程爱动脑思考的习惯!
VX:2311123606

往期推荐
🔗
-
相关阅读:
vuex模块化,以及如何借助mapActions,mapMutations生成对应的方法
netty系列之:在netty中使用native传输协议
2021-arXiv-The Power of Scale for Parameter-Efficient Prompt Tuning
vue中通过JavaScript实现web端鼠标横向滑动&触控板滑动效果-demo
win11改成win7界面的设置方法
如何将OAK集成到你的系统中?
ps神经网络滤镜安装包,ai神经网络滤镜安装包
mysql数据库增量备份方案、备份计划(InsCode AI 创作助手)
Python 基础问题
url请求头信息
- 原文地址:https://blog.csdn.net/gzq0723/article/details/133222891