-
两种常见矩形框旋转方法推导及其C++实现
在已知矩形中心点、长宽和旋转角度(定义为矩形最长边与X轴正方向的夹角),如何确定矩形四个顶点的坐标,通常有以下两种处理方法。
法一:直接对顶点进行旋转
比如下图虚线框矩形是实线框矩形绕矩形中心点旋转后得到。在已知矩形中心点坐标和长宽的前提下,实线框四顶点坐标可直接换算得到。然后就是分析计算经旋转后的虚线框矩形的四顶点坐标。
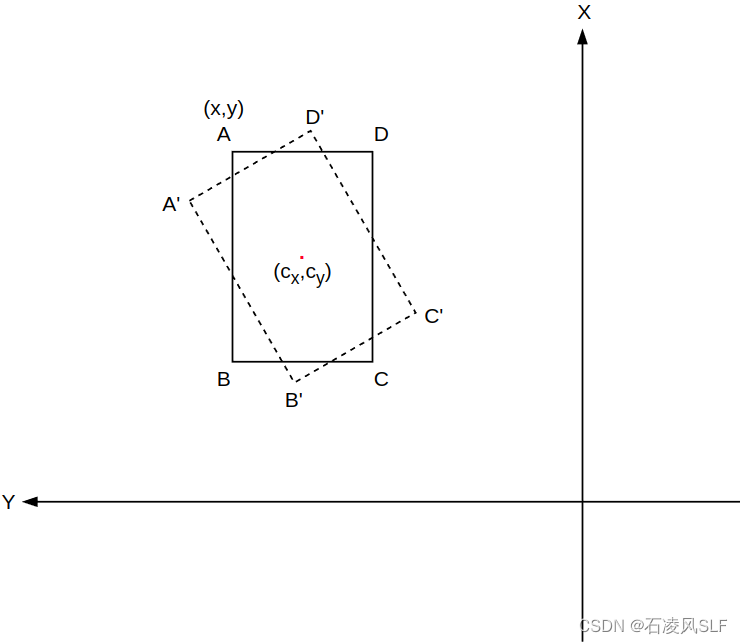
由于是绕矩形中心点旋转,因此可以将坐标系原点平移到矩形中心点位置。然后将矩形框四顶点用极坐标表示,并转换成直角坐标。

旋转前A顶点坐标:(其中
 表示矩形框四个顶点距离坐标原点的距离,α表示顶点与坐标原点连线与X轴的夹角)
表示矩形框四个顶点距离坐标原点的距离,α表示顶点与坐标原点连线与X轴的夹角)
则绕坐标原点旋转θ角度后A'顶点坐标:
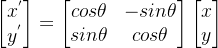
对A'顶点坐标按照三角函数的和差角公式展开:

将A顶点坐标代入A'顶点坐标则有:

用矩阵形式表示:

由于坐标系原点被平移到矩形中心点位置,因此最终还需将A'顶点坐标平移回去:

法二:根据三角形几何性质换算顶点坐标
针对四顶点分别绘制出下图所示辅助线,通过相似三角形不难得到下图中两相等辅助角。

矩形四顶点坐标分别为:




由于A与C、B与D分别是关于
 的对称点,所以各项正负号相反。
的对称点,所以各项正负号相反。法三:复数表示旋转
复数相乘可以描述平面上的旋转:乘以+i会逆时针旋转90°,乘以-i会顺时针旋转90°。要证明该几何法则,可先考虑变换
 ,如下图(a)所示,
,如下图(a)所示, 就是把z逆时针旋转了90°。而对于一般的复数A,为了直观的表示
就是把z逆时针旋转了90°。而对于一般的复数A,为了直观的表示 ,取
,取 ,如下图(b)所示:
,如下图(b)所示:
此时对于
 ,按照复数的运算法则括号可展开:
,按照复数的运算法则括号可展开: ,由前可知就是把z逆时针旋转90°。利用复数与向量之间一一对应的关系,上图(c)刻画了这一变换过程。将A用更一般的表达式表示:
,由前可知就是把z逆时针旋转90°。利用复数与向量之间一一对应的关系,上图(c)刻画了这一变换过程。将A用更一般的表达式表示: ,其中
,其中 ,则就是将z旋转
,则就是将z旋转 角度再缩放
角度再缩放 倍。
倍。将A用复变函数中欧拉公式的三角函数表示,并且出于简化计算的目的,取单位长度(旋转不改变大小)的复数,即:

则有:

将该等式用矩阵形式表示:
其中含正余弦的系数矩阵就是二维旋转矩阵(可见与法一的系数矩阵一致)。
用R表示系数矩阵,并对其求逆:
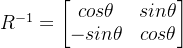
然后给用矩阵形式表示的等式两边同时左乘
 :
:将该矩阵形式恢复成复数形式:

其中:
 ,也就是复数的共轭表示一个相反的旋转(请牢记这一条性质,尤其是在推导四元数表示三维旋转时非常有用)。
,也就是复数的共轭表示一个相反的旋转(请牢记这一条性质,尤其是在推导四元数表示三维旋转时非常有用)。C++代码实现
- #include
- #include
- #include
- // #include
- #include
- #define MATH_PI 3.14159265358979323846264338327950288419716939937510L
- template <typename T>
- struct Point2D {
- T x = 0;
- T y = 0;
- };
- typedef Point2D<float> Point2DF;
- typedef Point2D<double> Point2DD;
- typedef struct {
- Point2DF center;
- float length;
- float width;
- float theta; //rad, (-pi,pi]
- } ST_BOX_INFO;
- typedef struct {
- Point2DF a;
- Point2DF b;
- Point2DF c;
- Point2DF d;
- } ST_BOX_FOUR_VERTICES;
- void RotateBoxVerticesMethod1(const ST_BOX_INFO& origin_box, ST_BOX_FOUR_VERTICES& rotated_box);
- void RotateBoxVerticesMethod2(const ST_BOX_INFO& origin_box, ST_BOX_FOUR_VERTICES& rotated_box);
- int main(void) {
- ST_BOX_INFO origin_box;
- origin_box.center.x = 4;
- origin_box.center.y = 3;
- origin_box.length = 4;
- origin_box.width = 2;
- origin_box.theta = 0.5 * MATH_PI;
- // origin_box.theta = 0.5 * 0.5 * MATH_PI;
- ST_BOX_FOUR_VERTICES rotated_box1, rotated_box2;
- RotateBoxVerticesMethod1(origin_box, rotated_box1);
- RotateBoxVerticesMethod2(origin_box, rotated_box2);
- return 0;
- }
- void RotateBoxVerticesMethod1(const ST_BOX_INFO& origin_box, ST_BOX_FOUR_VERTICES& rotated_box) {
- Eigen::MatrixXd R = Eigen::MatrixXd::Zero(8, 8);
- Eigen::VectorXd t(8);
- Eigen::VectorXd vertices(8);
- const auto l_half = 0.5 * origin_box.length;
- const auto w_half = 0.5 * origin_box.width;
- auto theta = origin_box.theta;
- if (1.0e-6 > (MATH_PI - std::fabs(theta))) {
- theta = 0.0;
- } else if (1.0e-6 > std::fabs((0.5 * MATH_PI) - std::fabs(theta))) {
- ;
- } else if ((0.5 * MATH_PI) < theta) {
- theta = theta - MATH_PI;
- } else if ((-0.5 * MATH_PI) > theta) {
- theta = theta + MATH_PI;
- }
- rotated_box.a.x = origin_box.center.x + l_half;
- rotated_box.a.y = origin_box.center.y + w_half;
- rotated_box.b.x = origin_box.center.x - l_half;
- rotated_box.b.y = origin_box.center.y + w_half;
- rotated_box.c.x = origin_box.center.x - l_half;
- rotated_box.c.y = origin_box.center.y - w_half;
- rotated_box.d.x = origin_box.center.x + l_half;
- rotated_box.d.y = origin_box.center.y - w_half;
- std::cout << "before rotated: (" << rotated_box.a.x << ',' << rotated_box.a.y << ')'
- << '(' << rotated_box.b.x << ',' << rotated_box.b.y << ')'
- << '(' << rotated_box.c.x << ',' << rotated_box.c.y << ')'
- << '(' << rotated_box.d.x << ',' << rotated_box.d.y << ')' << std::endl;
- R(0, 0) = R(1, 1) = R(2, 2) = R(3, 3) = R(4, 4) = R(5, 5) = R(6, 6) = R(7, 7) = std::cos(theta);
- R(1, 0) = R(3, 2) = R(5, 4) = R(7, 6) = std::sin(theta);
- R(0, 1) = R(2, 3) = R(4, 5) = R(6, 7) = -R(1, 0);
- t << origin_box.center.x, origin_box.center.y, origin_box.center.x, origin_box.center.y,
- origin_box.center.x, origin_box.center.y, origin_box.center.x, origin_box.center.y;
- vertices << rotated_box.a.x, rotated_box.a.y,
- rotated_box.b.x, rotated_box.b.y,
- rotated_box.c.x, rotated_box.c.y,
- rotated_box.d.x, rotated_box.d.y;
- const Eigen::VectorXd rslt = R * (vertices - t) + t;
- rotated_box.a.x = rslt(0);
- rotated_box.a.y = rslt(1);
- rotated_box.b.x = rslt(2);
- rotated_box.b.y = rslt(3);
- rotated_box.c.x = rslt(4);
- rotated_box.c.y = rslt(5);
- rotated_box.d.x = rslt(6);
- rotated_box.d.y = rslt(7);
- std::cout << "after rotated: (" << rotated_box.a.x << ',' << rotated_box.a.y << ')'
- << '(' << rotated_box.b.x << ',' << rotated_box.b.y << ')'
- << '(' << rotated_box.c.x << ',' << rotated_box.c.y << ')'
- << '(' << rotated_box.d.x << ',' << rotated_box.d.y << ')' << std::endl;
- }
- void RotateBoxVerticesMethod2(const ST_BOX_INFO& origin_box, ST_BOX_FOUR_VERTICES& rotated_box) {
- auto theta = origin_box.theta;
- if (1.0e-6 > (MATH_PI - std::fabs(theta))) {
- theta = 0.0;
- } else if (1.0e-6 > std::fabs((0.5 * MATH_PI) - std::fabs(theta))) {
- ;
- } else if ((0.5 * MATH_PI) < theta) {
- theta = theta - MATH_PI;
- } else if ((-0.5 * MATH_PI) > theta) {
- theta = theta + MATH_PI;
- }
- Eigen::Vector2d direction(std::cos(theta), std::sin(theta));
- Eigen::Vector2d orthog_dir(-direction.y(), direction.x());
- Eigen::Vector2d delta_x = 0.5 * origin_box.length * direction;
- Eigen::Vector2d delta_y = 0.5 * origin_box.width * orthog_dir;
- Eigen::Vector2d center = Eigen::Vector2d(origin_box.center.x, origin_box.center.y);
- std::vector
- vertices[0] = center + (delta_x + delta_y);
- vertices[1] = center + (-delta_x + delta_y);
- vertices[2] = center + (-delta_x - delta_y);
- vertices[3] = center + (delta_x - delta_y);
- rotated_box.a.x = vertices[0](0);
- rotated_box.a.y = vertices[0](1);
- rotated_box.b.x = vertices[1](0);
- rotated_box.b.y = vertices[1](1);
- rotated_box.c.x = vertices[2](0);
- rotated_box.c.y = vertices[2](1);
- rotated_box.d.x = vertices[3](0);
- rotated_box.d.y = vertices[3](1);
- std::cout << "after rotated: (" << rotated_box.a.x << ',' << rotated_box.a.y << ')'
- << '(' << rotated_box.b.x << ',' << rotated_box.b.y << ')'
- << '(' << rotated_box.c.x << ',' << rotated_box.c.y << ')'
- << '(' << rotated_box.d.x << ',' << rotated_box.d.y << ')' << std::endl;
- }
若是要计算三维长方体的的八个顶点(已知中心点、长宽高和旋转角度,且pitch、roll角恒为0°),则用以上同样的方法先计算底部长方形的四顶点坐标,然后再将长方体的高累加到四顶点坐标对应轴上,即可得到顶部长方形四顶点的坐标。
其它方法可在评论区留言补充。
-
相关阅读:
[附源码]JAVA毕业设计个性化推荐的扬州农业文化旅游管理平台(系统+LW)
Matlab之当前路径与上一级路径的符号使用
Linux之LNMP离线安装
列表推导式,Python中最好的特性?可读性?
神经网络梯度是什么意思,卷积神经网络梯度下降
C#日志简单框架及实际测试
数据分析常见的业务面试题
23.3 Bootstrap 框架4
go 地址 生成唯一索引v2 --chatGPT
java-net-php-python-jspm校园闲置物品拍卖系统计算机毕业设计程序
- 原文地址:https://blog.csdn.net/jiqiren_dasheng/article/details/132423669
