-
【ROS入门】使用 ROS 话题(Topic)机制实现消息发布与订阅及launch文件的封装
任务要求
使用 ROS 话题(Topic)机制实现消息发布与订阅:
- 创建一个发布者,每隔 100ms 依次发送斐波拉契数列的数字到话题/fibonacci 中;
- 创建一个订阅者,订阅该话题,输出订阅结果。如,订阅者依次输出: 1 1 2 3 5 8…
- 将发布者和订阅者分别封装成launch文件,并能成功实现上述功能
话题模型

实现步骤
创建工作空间并初始化
$ mkdir -p ROS_Topic_Demo/src $ cd ROS_Topic_Demo $ catkin_make- 1
- 2
- 3
上述命令,首先会创建一个工作空间以及一个 src 子目录,然后再进入工作空间调用 catkin_make命令编译。
创建功能包并添加依赖
在工作空间的src文件夹的目录下打开终端并创建功能包
$ catkin_create_pkg ROS_Topic_Demo roscpp rospy std_msgs- 1
创建发布者代码(C++)
如何实现一个发布者:
- 初始化ROS节点
- 向 ROS Master注册节点信息,包括发布的话题名和话题中的消息类型
- 创建消息数据
- 按照一定频率循环发布消息
在ROS_Topic_Demo下的src文件夹中创建一个cpp文件:
$ touch topic_demo_pub_c.app- 1
/*创建一个发布者,每隔 100ms 依次发送斐波拉契数列的数字到话题/fibonacci 中*/ //1.头文件 #include "ros/ros.h" //万能头 // #include "iostream" #include "std_msgs/String.h" //普通文本类型的消息 int main(int argc, char *argv[]) { //设置编码(其实这行在这个任务里头没啥用,只不过拿来凑行数而已,应要说的话就是能在打印的时候看的更加清楚而已)。 setlocale(LC_ALL,""); //2.初始化ROS节点 //ros::init()函数需要查看 argc 和 argv,以便执行命令行提供的任何 ROS 参数和名称重映射。 //参数1和参数2用于传参,参数3为节点名称,需要保持名称唯一 ros::init(argc,argv,"Publisher"); //3.实例化ROS节点句柄 //节点句柄用来管理ROS相关的api资源。调用api时,经常需要使用节点句柄进行调用。 ros::NodeHandle n; //4.实例化发布者对象 //advertise()函数用于告诉ROS需要发布的主题名称。这将调用ROS Master节点,该节点将会记录谁在发布,谁在订阅。 //调用 advertise() 后,Master节点会通知任何试图订阅该主题名称的节点,并进行配对。 //advertise() 返回一个发布者对象,它允许您使用该对象通过调用 publish() 在该主题上发布消息。 //一旦返回的 Publisher 对象的所有副本都被销毁后,该主题将自动销毁。 //第一个参数为话题名称,第二个参数为发布消息队列缓冲区的大小。 ros::Publisher fibonacci_pub = n.advertise<std_msgs::String>("/fibonacci",100); //5.组织被发布的数据,并编写逻辑发布数据 //数据(动态组织) std_msgs::String msg; int num = 1; int temp = 0; //设置循环频率 ros::Rate time(10); ros::Rate time1(1); time1.sleep(); //确保发布的代码比订阅的代码晚运行,保证订阅者可以完整的订阅到发布者的信息,防止漏掉一开始的信息。 while(ros::ok()) { //发布消息 std::stringstream ss; ss<<num; msg.data = ss.str(); fibonacci_pub.publish(msg); //打印发送的消息 ROS_INFO("发送数据:%s",msg.data.c_str()); int former = num; num+=temp; temp=former; //设置休眠时间 time.sleep(); } return 0; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
创建订阅方代码(C++)
在ROS_Topic_Demo下的src文件夹中创建一个cpp文件:
$ touch topic_demo_sub_c.app- 1
//1.头文件 #include "ros/ros.h" #include "std_msgs/String.h" //5.利用回调函数读取数据 void callBack(const std_msgs::String::ConstPtr &msg) { //通过msg获取并操作订阅到的数据 ROS_INFO("订阅到的数:%s",msg->data.c_str()); } int main(int argc, char *argv[]) { setlocale(LC_ALL,""); //2.初始化ROS节点 ros::init(argc,argv,"Subscriber"); //3.实例化ROS节点句柄 ros::NodeHandle n; //4.实例化发布者对象 ros::Subscriber fibonacci_sub = n.subscribe<std_msgs::String>("/fibonacci",100,callBack); //6.设置循环调用回调函数 ros::spin(); //循环读取接收的数据,并调用回调函数处理 return 0; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
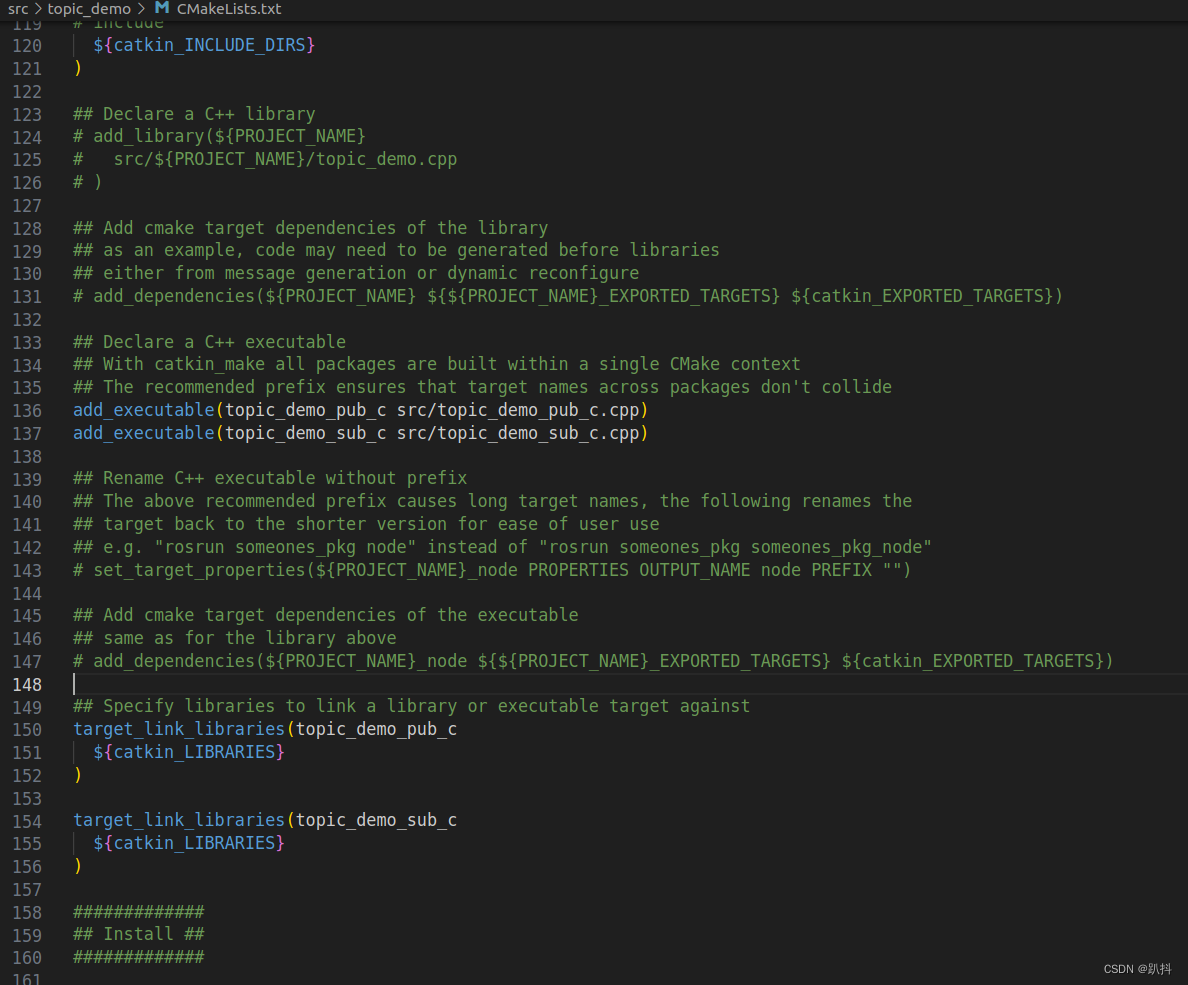
配置CMakeLists.txt
add_executable(topic_demo_pub_c src/topic_demo_pub_c.cpp) add_executable(topic_demo_sub_c src/topic_demo_sub_c.cpp) target_link_libraries(topic_demo_pub_c ${catkin_LIBRARIES} ) target_link_libraries(topic_demo_sub_c ${catkin_LIBRARIES} )- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
位置如图所示:
执行
启动roscore
$ roscore- 1
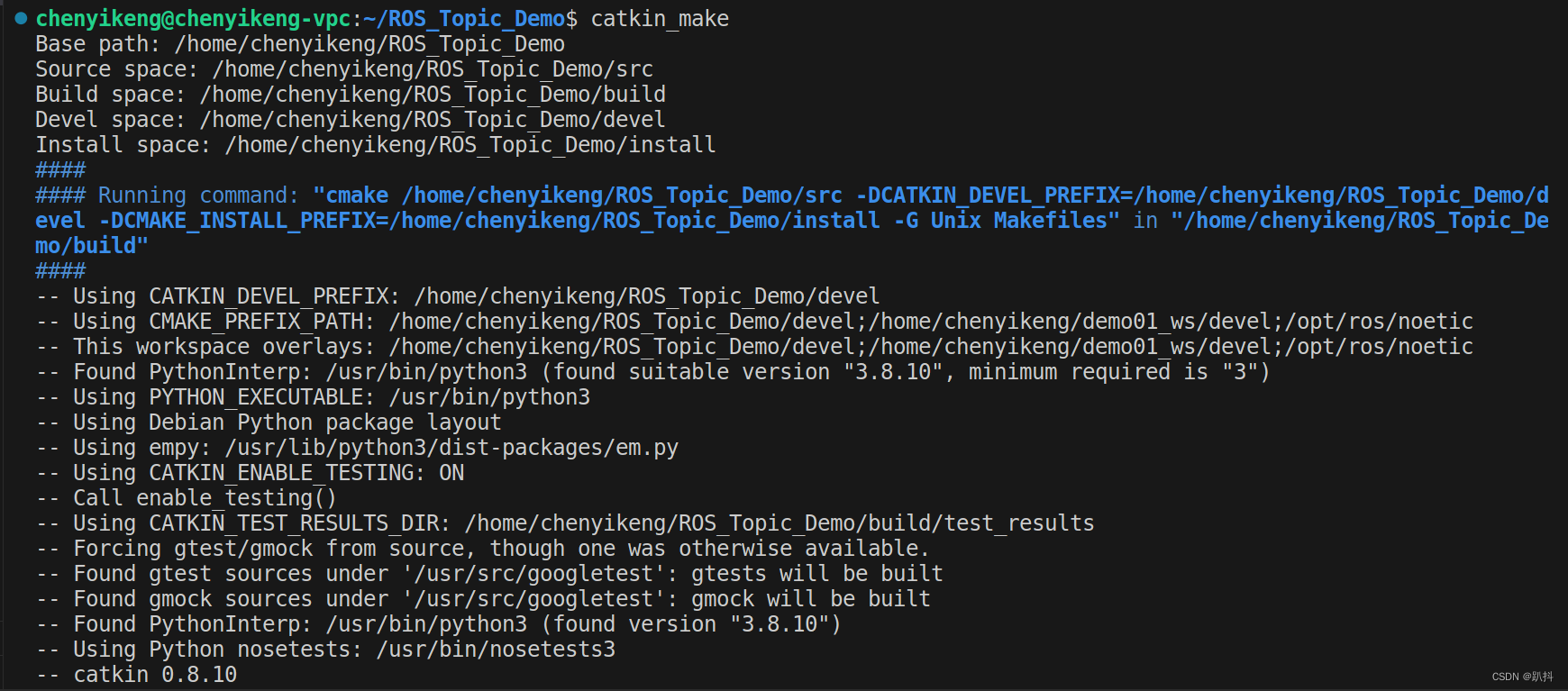
编译
$ catkin_make- 1
启动发布和订阅节点
$ source ./devel/setup.bash $ rosrun rosrun topic_demo topic_demo_sub_c- 1
- 2
再开一个终端
$ source ./devel/setup.bash $ rosrun rosrun topic_demo topic_demo_pub_c- 1
- 2
效果如下:

launch封装
在功能包添加 launch 文件夹,并添加 launch 文件
<launch> <node pkg="topic_demo" type="topic_demo_pub_c" name="Subscriber" output="screen"/> <node pkg="topic_demo" type="topic_demo_sub_c" name="Publisher" output="screen"/> launch>- 1
- 2
- 3
- 4
- node: 包含的某个节点
- pkg: 功能包
- type: 被运行的节点文件
- name: 为节点命名
- output: 设置日志的输出目标
执行
$ roslaunch topic_demo topic_demo_launch.launch- 1
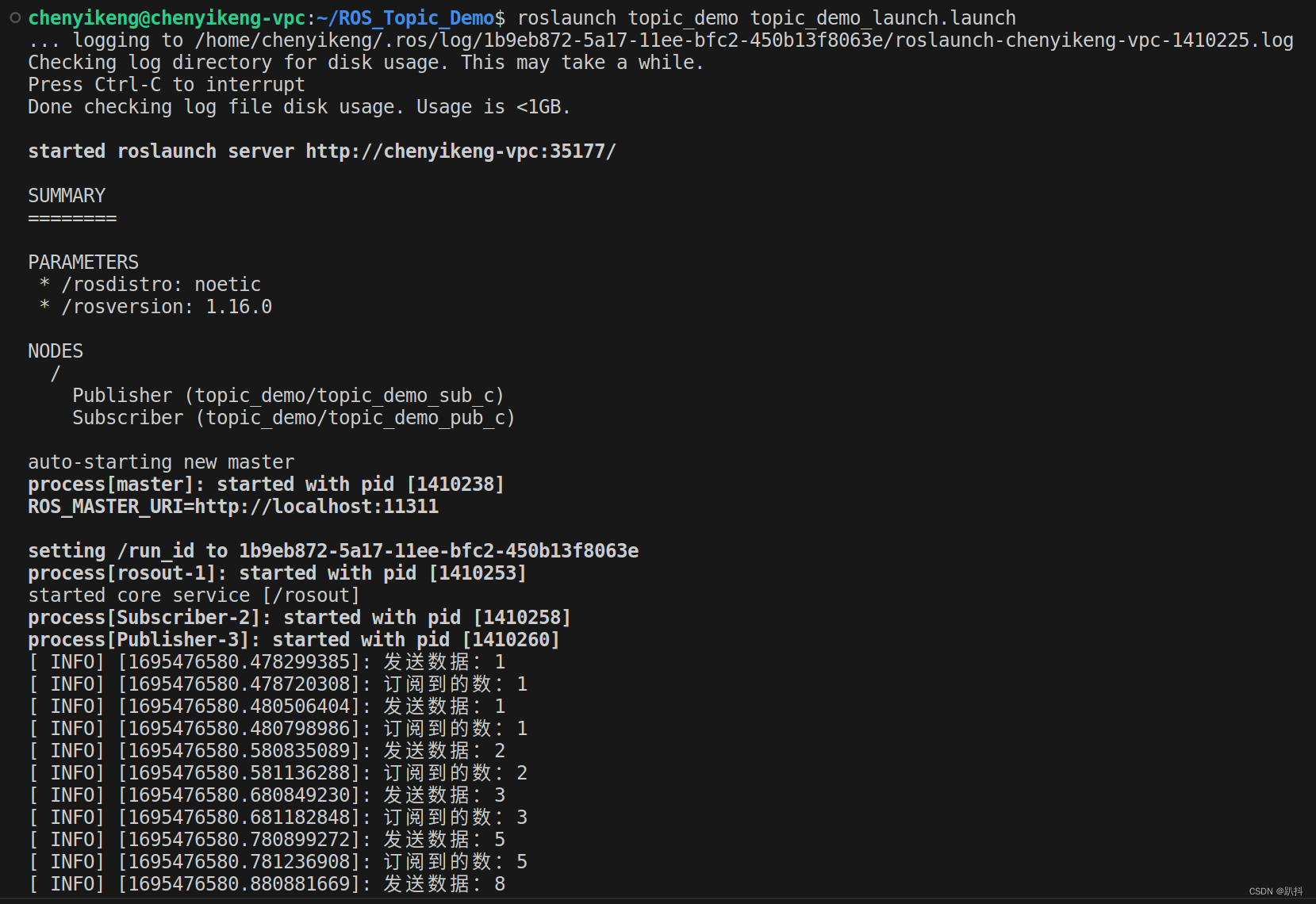
-
相关阅读:
Install Ansible on CentOS 8
RK3568开发板评测篇(二):开发环境搭建
唱衰这么多年,PHP 仍然还是你大爷!
祝大家都能找到心仪的工作
MC Instruction Decoder
数据库更新没有反映在前端页面
跨环境同步数据的操作方式:使用mysqldump 远程执行备份与还原
java毕业设计景区管理系统mybatis+源码+调试部署+系统+数据库+lw
【Git】如何在Vscode中使用码云(Gitee)实现远程代码仓库与本地同步?(新手图文教程)
matlab RBF语音识别
- 原文地址:https://blog.csdn.net/PuddleRubbish/article/details/133148613