-
ROS 基础教程
欢迎访问我的博客首页。
1.urdf 文件
假设我们的工作空间是 ws_ros。我们自己实现的包将会放在 ws_ros/src/toturial。首先创建一个 ROS 功能包 urdf_pkg:
# 在 ws_ros/src/toturial 下执行: catkin_create_pkg urdf_pkg urdf xacro gazebo_ros gazebo_ros_control gazebo_plugins- 1
- 2
该功能包有 5 个依赖 urdf xacro gazebo_ros gazebo_ros_control gazebo_plugins:urdf 和 xacro 让我们能使用 urdf 和 xacro 文件定义机器人模型;后面三个依赖让我们能使用 Gazebo 仿真。
1.1 在 Rviz 中显示 urdf
使用 urdf 文件定义一个仅有两个坐标系的机器人模型,并在 Rviz 中显示。
1.1.1 定义 urdf
创建文件 ws_ros/src/toturial/urdf_pkg/urdf/urdf1.urdf。
<robot name="urdf1"> <link name="base_link"> <visual> <geometry> <box size="0.5 0.2 0.1" /> geometry> <origin xyz="0 0 0" rpy="0 0 0.785" /> <material name="green"> <color rgba="0 1 0 0.5" /> material> visual> link> <link name="laser_link"> <visual> <geometry> <cylinder radius="0.05" length="0.01" /> geometry> <origin xyz="0 0 0.05" rpy="0 0 0" /> <material name="blue"> <color rgba="0 0 1 1" /> material> visual> link> <joint name="laser_link_to_base_link" type="fixed"> <parent link="base_link" /> <child link="laser_link" /> <origin xyz="0 0 0" /> <axis xyz="0 1 0" /> joint> robot>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
该模型有两个坐标系组成。第一个坐标系是名为 base_link 的长方体:标签 geometry 定义了尺寸;标签 origin 定义了几何中心的坐标和欧拉角 Roll-Pitch-Yaw,0.785 为 π / 4 \pi/4 π/4;标签 color 定义了颜色。
当 urdf 文件中定义的坐标系超过 1 个时,必须定义坐标系间的变换:定义了 n 个坐标系,需要定义 n-1 个变换。
1.1.2 在 Rviz 中查看 urdf
创建文件 ws_ros/src/toturial/urdf_pkg/launch/urdf1.launch。
<launch> <node pkg="rviz" type="rviz" name="rviz" args="-d $(find urdf_pkg)/config/urdf1.rviz" /> <param name="robot_description" textfile="$(find urdf_pkg)/urdf/urdf1.urdf" /> <node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" output="screen" /> launch>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
该文件启动两个结点。rviz 结点用于可视化,urdf1.rviz 是 Rviz 的配置文件,需要我们启动后配置并保存,下次再启动时才能使用;robot_state_publisher 结点发布坐标系变换,必需为其指定 robot_description 参数。
Rviz 启动时,默认只有 Global Options、Global Status 和 Gird 三项。Global Options/Fixed Frame 默认坐标系是 map,而我们的 urdf1.urdf 中只定义了坐标系 base_link 和 laser_link,所以会报错 Global Status/Fixed Frame/Unknown frame map。
解决方法是在 Global Options/Fixed Frame 的下拉选框中选择 base_link 或 laser_link。因为我们的 urdf1.urdf 中只定义了坐标系 base_link 和 laser_link,所以下拉选框只有这两个。然后点击 Add,添加 RobotModel 就可以在 Rviz 中看到我们定义的机器人了。点击 File/Save Config As,保存 ws_ros/src/toturial/urdf_pkg/config/urdf1.rviz,下次就无需配置 Rviz 了。
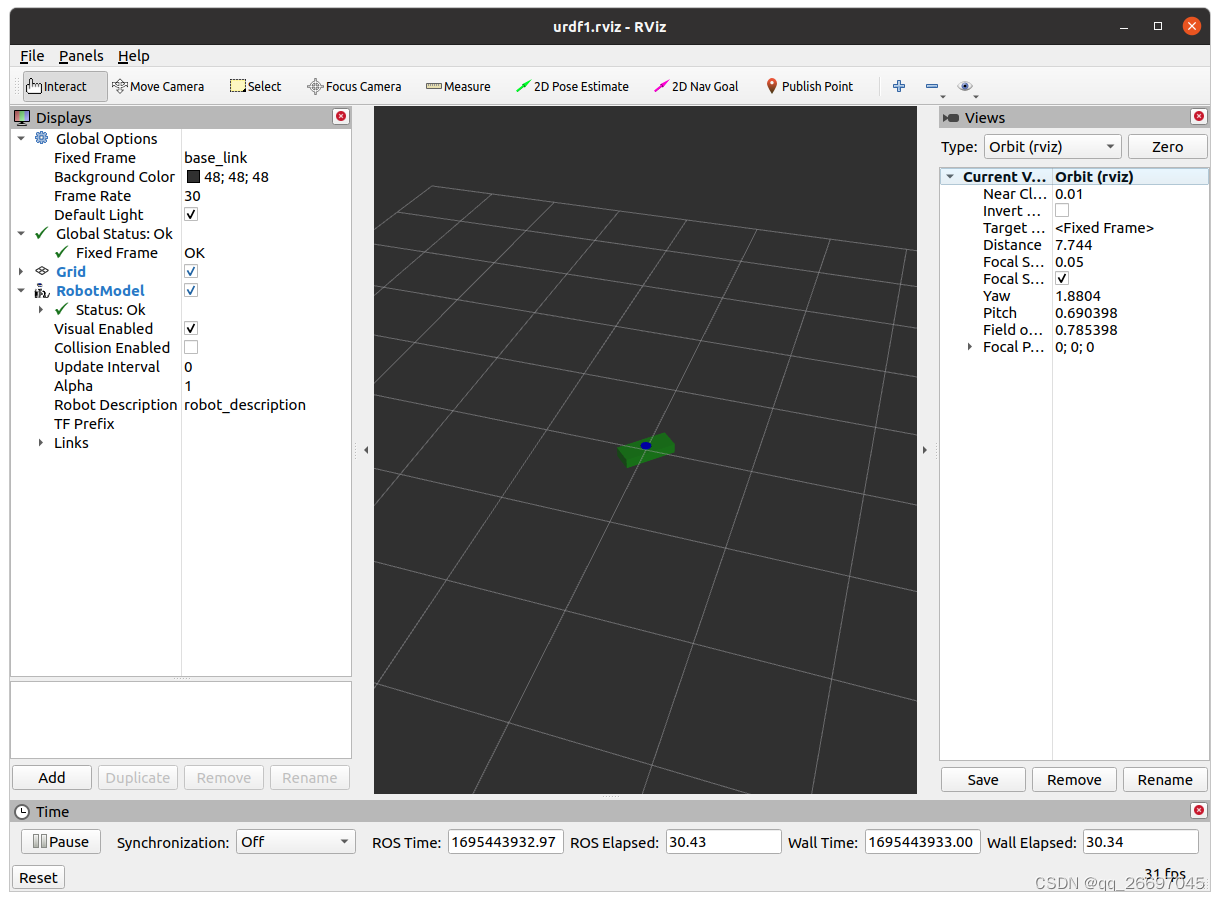
图 1.1 在 Rviz 中显示 urdf
1.2 在 Gazebo 中显示 urdf
在 urdf1.urdf 的基础上定义 urdf2.urdf,并在 Gazebo 中显示。
1.2.1 定义 urdf
创建文件 ws_ros/src/toturial/urdf_pkg/urdf/urdf2.urdf。
<robot name="urdf2"> <material name="green"> <color rgba="0 1 0 0.5" /> material> <material name="blue"> <color rgba="0 0 1 1" /> material> <link name="base_link"> <visual> <geometry> <box size="0.5 0.2 0.1" /> geometry> <origin xyz="0 0 0" rpy="0 0 0.785" /> <material name="green" /> visual> <collision> <geometry> <box size="0.5 0.2 0.1" /> geometry> collision> <inertial> <mass value="6" /> <inertia ixx="1" ixy="0" ixz="0" iyy="1" iyz="0" izz="1" /> inertial> link> <link name="laser_link"> <visual> <geometry> <cylinder radius="0.05" length="0.01" /> geometry> <origin xyz="0 0 0.05" rpy="0 0 0" /> <material name="blue" /> visual> link> <joint name="laser_link_to_base_link" type="fixed"> <parent link="base_link" /> <child link="laser_link" /> <origin xyz="0 0 0" rpy="0 0 0" /> <axis xyz="0 1 0" /> joint> <gazebo reference="base_link"> <material>Gazebo/Greenmaterial> gazebo> <gazebo reference="laser_link"> <material>Gazebo/Bluematerial> gazebo> robot>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
和 urdf1 一样,该模型有两个坐标系组成。为了能在 Gazebo 中显示机器人,必须有一个坐标系定义了碰撞标签 collision 和惯性标签 inertial。此外,为了在 Gazebo 中显示颜色,必须在标签 gazebo 下使用标签 material 指定。
1.2.2 在 Gazebo 中查看 urdf
创建文件 ws_ros/src/toturial/urdf_pkg/launch/urdf2.launch。
<launch> <include file="$(find gazebo_ros)/launch/empty_world.launch" /> <param name="robot_description" textfile="$(find urdf_pkg)/urdf/urdf2.urdf" /> <node pkg="gazebo_ros" type="spawn_model" name="robot_urdf_tutorial" args="-urdf -model robot_urdf_tutorial -param robot_description" /> launch>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
该 launch 文件使用官方 ROS 包 gazebo_ros,这是安装 ROS 是自动安装的。使用 empty_world.launch 显示仿真环境,使用 spawn_model 显示我们的 urdf 文件。与 Rviz 不同的是,Gazebo 不需配置文件。
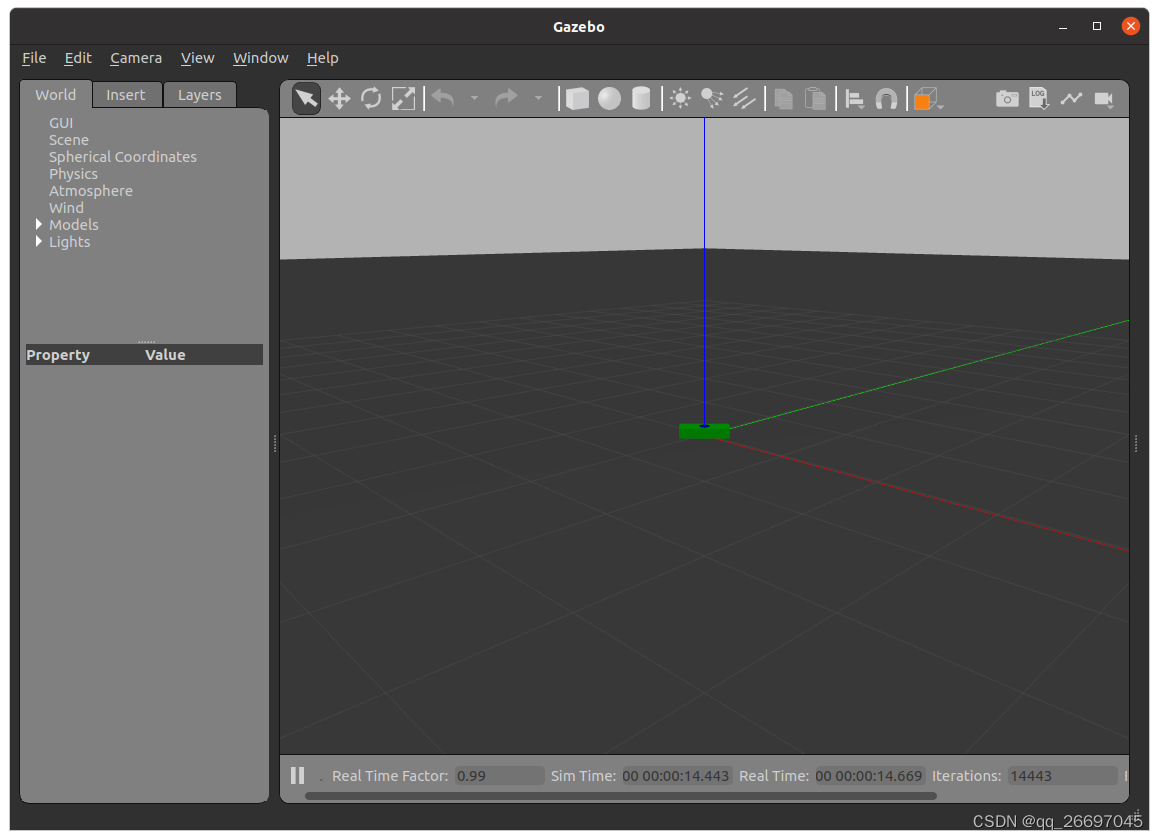
图 1.2 在 Gazebo 中显示 urdf
2.建图-仿真
在仿真环境下,使用 gmapping 建图。
2.1 模型
由于要使用带有差速轮的机器人模型,所以我们直接使用别人定义好的模型文件 ws_ros/src/toturial/navigation_pkg/urdf/agv.urdf。
<robot name="agv"> <link name="base_coordinate"> <visual> <geometry> <sphere radius="0.001" /> geometry> visual> link> <link name="base_link"> <visual> <geometry> <mesh filename="package://navigation_pkg/meshes/agv.stl"/> geometry> <origin xyz="0 0 0" rpy="0 0 1.57" /> <material name="blue"> <color rgba="0 0.25 0.5 0.8" /> material> visual> <collision> <geometry> <box size="0.34 0.34 0.34" /> geometry> <origin xyz="-0.8 0.0 0.0" rpy="0.0 0.0 1.57" /> collision> <inertial> <origin xyz="0 0 0" /> <mass value="1" /> <inertia ixx="0.2" ixy="0" ixz="0" iyy="0.2" iyz="0" izz="0.2" /> inertial> link> <gazebo reference="base_link"> <material>Gazebo/Bluematerial> gazebo> <joint name="base_link_to_base_coordinate" type="fixed"> <parent link="base_coordinate" /> <child link="base_link"/> <origin xyz="0 0 0.205" /> joint> <link name="right_wheel"> <visual> <geometry> <cylinder radius="0.09" length="0.06" /> geometry> <origin xyz="0 0 0" rpy="1.57 0 0" /> <material name="black"> <color rgba="0.0 0.0 0.0 1.0" /> material> visual> <collision> <geometry> <cylinder radius="0.09" length="0.06" /> geometry> <origin xyz="0 0 0" rpy="1.57 0 0" /> collision> <inertial> <origin xyz="0 0 0" /> <mass value="2" /> <inertia ixx="0.02" ixy="0" ixz="0" iyy="0.02" iyz="0" izz="0.04" /> inertial> link> <gazebo reference="right_wheel"> <material>Gazebo/Blackmaterial> gazebo> <joint name="base_r_wheel_joint" type="continuous"> <parent link="base_link" /> <child link="right_wheel" /> <origin xyz="0.13 -0.1575 -0.115" /> <axis xyz="0 1 0" /> joint> <link name="left_wheel"> <visual> <geometry> <cylinder radius="0.09" length="0.06" /> geometry> <origin xyz="0 0 0" rpy="1.57 0 0" /> <material name="black"> <color rgba="0.0 0.0 0.0 1.0" /> material> visual> <collision> <geometry> <cylinder radius="0.09" length="0.06" /> geometry> <origin xyz="0 0 0" rpy="1.57 0 0" /> collision> <inertial> <origin xyz="0 0 0" /> <mass value="2" /> <inertia ixx="0.02" ixy="0" ixz="0" iyy="0.02" iyz="0" izz="0.04" /> inertial> link> <gazebo reference="left_wheel"> <material>Gazebo/Blackmaterial> gazebo> <joint name="base_l_wheel_joint" type="continuous"> <parent link="base_link" /> <child link="left_wheel" /> <origin xyz="0.13 0.1575 -0.115" /> <axis xyz="0 1 0" /> joint> <link name="universal_wheel"> <visual> <geometry> <sphere radius="0.035" /> geometry> <origin xyz="0 0 0" rpy="0 0 0" /> <material name="black"> <color rgba="0.0 0.0 0.0 1.0" /> material> visual> <collision> <geometry> <sphere radius="0.035" /> geometry> <origin xyz="0 0 0" rpy="0 0 0" /> collision> <inertial> <origin xyz="0 0 0" /> <mass value="0.5" /> <inertia ixx="0.0002" ixy="0" ixz="0" iyy="0.0002" iyz="0" izz="0.0002" /> inertial> link> <gazebo reference="universal_wheel"> <material>Gazebo/Whitematerial> gazebo> <joint name="universal_wheel_to_base_link" type="continuous"> <parent link="base_link" /> <child link="universal_wheel" /> <origin xyz="-0.135 0 -0.17" /> <axis xyz="1 1 1" /> joint> <link name="laser"> <visual> <geometry> <box size="0.05 0.05 0.05" /> geometry> <origin xyz="0 0 0" rpy="0 0 0" /> <material name="red"> <color rgba="1.0 0.0 0.0 1.0" /> material> visual> <collision> <geometry> <box size="0.05 0.05 0.05" /> geometry> <origin xyz="0 0 0" rpy="0 0 0" /> collision> <inertial> <origin xyz="0 0 0" /> <mass value="0.2" /> <inertia ixx="0.00008" ixy="0" ixz="0" iyy="0.00008" iyz="0" izz="0.00008" /> inertial> link> <gazebo reference="laser"> <material>Gazebo/Redmaterial> gazebo> <joint name="laser_to_base_link" type="fixed"> <parent link="base_link" /> <child link="laser" /> <origin xyz="0.12 0 0.195" /> joint> <link name="camera"> <visual> <geometry> <cylinder radius="0.02" length="0.01" /> geometry> <origin xyz="0 0 0" rpy="0 1.57 0" /> <material name="yellow"> <color rgba="1.0 1.0 0.0 1.0" /> material> visual> <collision> <geometry> <cylinder radius="0.02" length="0.01" /> geometry> <origin xyz="0 0 0" rpy="0 1.57 0" /> collision> <inertial> <origin xyz="0 0 0" /> <mass value="0.1" /> <inertia ixx="0.00001" ixy="0" ixz="0" iyy="0.00001" iyz="0" izz="0.00002" /> inertial> link> <gazebo reference="camera"> <material>Gazebo/Yellowmaterial> gazebo> <joint name="camera_to_base_link" type="fixed"> <parent link="base_link" /> <child link="camera" /> <origin xyz="0.23 0 0.145" /> joint> <gazebo> <plugin name="differential_drive_controller" filename="libgazebo_ros_diff_drive.so"> <rosDebugLevel>DebugrosDebugLevel> <publishWheelTF>truepublishWheelTF> <robotNamespace>/robotNamespace> <publishTf>1publishTf> <publishWheelJointState>truepublishWheelJointState> <alwaysOn>truealwaysOn> <updateRate>100.0updateRate> <legacyMode>truelegacyMode> <leftJoint>base_l_wheel_jointleftJoint> <rightJoint>base_r_wheel_jointrightJoint> <wheelSeparation>0.315wheelSeparation> <wheelDiameter>0.18wheelDiameter> <broadcastTF>1broadcastTF> <wheelTorque>30wheelTorque> <wheelAcceleration>1.8wheelAcceleration> <commandTopic>cmd_velcommandTopic> <odometryFrame>odomodometryFrame> <odometryTopic>odomodometryTopic> <robotBaseFrame>base_coordinaterobotBaseFrame> plugin> gazebo> <gazebo reference="laser"> <sensor type="ray" name="rplidar"> <pose>0 0 0 0 0 0pose> <visualize>truevisualize> <update_rate>5.5update_rate> <ray> <scan> <horizontal> <samples>360samples> <resolution>1resolution> <min_angle>-3min_angle> <max_angle>3max_angle> horizontal> scan> <range> <min>0.10min> <max>30.0max> <resolution>0.01resolution> range> <noise> <type>gaussiantype> <mean>0.0mean> <stddev>0.01stddev> noise> ray> <plugin name="gazebo_rplidar" filename="libgazebo_ros_laser.so"> <topicName>/scantopicName> <frameName>laserframeName> plugin> sensor> gazebo> robot>- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
3.建图-实况
3.参考
-
相关阅读:
SOFAStack软件供应链安全产品解析——SCA软件成分分析
Python 多线程与多进程
XUnit数据共享与并行测试
【重温基础算法】内部排序之希尔排序法
智慧环卫管理系统解决方案(垃圾分类)
python基础:字符串方法灵活应用
SAP Commerce Cloud Accelerator 的响应式 Theme 介绍
【C++】STL容器——vector类的使用指南(含代码演示)(11)
SpringBoot SpringBoot 原理篇 3 核心原理 3.1 SpringBoot程序启动过程思想解析
【送书活动1】强势挑战Java,Kotlin杀回TIOBE榜单Top 20!
- 原文地址:https://blog.csdn.net/qq_26697045/article/details/133202169
