-
RK3568驱动指南|第五篇 中断-第42章 软中断实验
瑞芯微RK3568芯片是一款定位中高端的通用型SOC,采用22nm制程工艺,搭载一颗四核Cortex-A55处理器和Mali G52 2EE 图形处理器。RK3568 支持4K 解码和 1080P 编码,支持SATA/PCIE/USB3.0 外围接口。RK3568内置独立NPU,可用于轻量级人工智能应用。RK3568 支持安卓 11 和 linux 系统,主要面向物联网网关、NVR 存储、工控平板、工业检测、工控盒、卡拉 OK、云终端、车载中控等行业。
【公众号】迅为电子【粉丝群】824412014(加群获取驱动文档+例程)
【视频观看】嵌入式学习之Linux驱动(第五期_中断_全新升级)_基于RK3568
【购买链接】迅为RK3568开发板瑞芯微Linux安卓鸿蒙ARM核心板人工智能AI主板
第42章 软中断实验
在上个章节我们学习了中断下文的一种实验方式——tasklet,本章节我们来学习中断下文的另一种实现方式——软中断。软中断的资料有限,对应的中断号不多,一般用在网络设备驱动,块设备驱动当中。这时本章节要学习的软中断就闪耀登场了。
42.1 什么是软中断
打开Linux源码linux_sdk/kernel/include/linux/interrupt.h文件,如下所示:
- enum
- {
- HI_SOFTIRQ=0,
- TIMER_SOFTIRQ,
- NET_TX_SOFTIRQ,
- NET_RX_SOFTIRQ,
- BLOCK_SOFTIRQ,
- IRQ_POLL_SOFTIRQ,
- TASKLET_SOFTIRQ,
- SCHED_SOFTIRQ,
- HRTIMER_SOFTIRQ, /* Unused, but kept as tools rely on the numbering. Sigh! */
- RCU_SOFTIRQ, /* Preferable RCU should always be the last softirq */
- NR_SOFTIRQS
- };
以上代码定义了一个枚举类型,用于标识软中断的不同类型或优先级。每个枚举常量对应一个特定的软中断类型。
以下是每个枚举常量的含义:
HI_SOFTIRQ:高优先级软中断
TIMER_SOFTIRQ:定时器软中断
NET_TX_SOFTIRQ:网络传输发送软中断
NET_RX_SOFTIRQ:网络传输接收软中断
BLOCK_SOFTIRQ:块设备软中断
IRQ_POLL_SOFTIRQ:中断轮询软中断
TASKLET_SOFTIRQ:任务软中断
SCHED_SOFTIRQ:调度软中断
HRTIMER_SOFTIRQ, /* Unused, but kept as tools rely on the numbering. Sigh! */
RCU_SOFTIRQ, /* Preferable RCU should always be the last softirq */
NR_SOFTIRQS:表示软中断的总数,用于指示软中断类型的数据
中断号的优先级越小,代表优先级越高。在驱动代码中,我们可以使用Linux驱动代码中上述的软中断,当然我们也可以自己添加软中断。我们添加一个自定义的软中断,如下所示,TEST_SOFTIRQ为自定义添加的软中断。
- enum
- {
- HI_SOFTIRQ=0,
- TIMER_SOFTIRQ,
- NET_TX_SOFTIRQ,
- NET_RX_SOFTIRQ,
- BLOCK_SOFTIRQ,
- IRQ_POLL_SOFTIRQ,
- TASKLET_SOFTIRQ,
- SCHED_SOFTIRQ,
- HRTIMER_SOFTIRQ, /* Unused, but kept as tools rely on the
- numbering. Sigh! */
- RCU_SOFTIRQ, /* Preferable RCU should always be the last softirq */
- TEST_SOFTIRQ, //添加的自定义软中断
- NR_SOFTIRQS
- };
这里要注意:尽管我们添加一个自定义的软中断非常简单,但是Linux内核的开发者并不希望我们这样去做,如果我们要用软中断,建议使用tasklet。虽然Linux内核开发者不建议自定义软中断,但是我们抱着学习的态度,了解学习下软中断还是很有必要的。上述修改之后,重新编译内核源码,接下来我们来学习下软中断的使用方法。
42.2 软中断接口函数
软中断的接口函数非常简单,介绍如下所示:
1 注册软中断,使用open_softirq函数,函数原型如下所示:
void open_softirq(int nr,void (*action)(struct softirq_action *));函数的参数如下所示:
nr: 软中断的编号或优先级。它是一个整数,表示要注册的软中断的标识符。
action: 指向一个函数的指针,这个函数将作为软中断的处理程序。该函数接受一个struct softirq_action类型的参数。
2 触发软中断,使用 raise_softirq函数,函数原型如下所示:
void raise_softirq(unsigned int nr);函数的参数如下所示:
nr: 软中断的编号或优先级。它是一个整数,表示要注册的软中断的标识符。
3 在禁用硬件中断的情况下,触发软中断使用raise_softirq_irqoff函数,函数原型如下所示:
void raise_softirq_irqoff(unsigned int nr);函数的参数如下所示:
nr: 软中断的编号或优先级。它是一个整数,表示要注册的软中断的标识符。
在下一小节中将使用上述软中断API进行相应的实验。
42.3 实验程序的编写
42.3.1 驱动程序编写
本实验对应的网盘路径为:iTOP-RK3568开发板【底板V1.7版本】\03_【iTOP-RK3568开发板】指南教程\02_Linux驱动配套资料\04_Linux驱动例程\33_softirq\module。
本实验将实现注册显示屏触摸中断,每按当触摸LCD显示屏就会触发中断服务函数,在中断服务函数中触发软中断,打印“This id test_interrupt”和“This is testsoft_func”。
在驱动程序中的模块初始化函数中,我们将GPIO转换为中断号,并使用request_irq函数请求中断,然后注册软中断函数。在中断处理函数中,我们触发软中断,使得当中断触发时,软中断处理函数会被调度执行。
接下来我们编写驱动代码,使用软中断来实现中断的下半部分。编写完成的interrupt.c代码如下所示:
- #include
- #include
- #include
- #include
- // #include
- int irq;
- // 软中断处理程序
- void testsoft_func(struct softirq_action *softirq_action)
- {
- printk("This is testsoft_func\n");
- }
- irqreturn_t test_interrupt(int irq, void *args)
- {
- printk("This is test_interrupt\n");
- raise_softirq(TEST_SOFTIRQ); // 触发软中断
- return IRQ_RETVAL(IRQ_HANDLED);
- }
- static int interrupt_irq_init(void)
- {
- int ret;
- irq = gpio_to_irq(101); // 将GPIO映射为中断号
- printk("irq is %d\n", irq);
- // 请求中断
- ret = request_irq(irq, test_interrupt, IRQF_TRIGGER_RISING, "test", NULL);
- if (ret < 0)
- {
- printk("request_irq is error\n");
- return -1;
- }
- // 注册软中断函数
- open_softirq(TEST_SOFTIRQ, testsoft_func);
- return 0;
- }
- static void interrupt_irq_exit(void)
- {
- free_irq(irq, NULL); // 释放中断
- printk("bye bye\n");
- }
- module_init(interrupt_irq_init);
- module_exit(interrupt_irq_exit);
- MODULE_LICENSE("GPL");
- MODULE_AUTHOR("topeet");
42.4 运行测试
42.4.1 编译驱动程序
在上一小节中的interrupt.c代码同一目录下创建 Makefile 文件,Makefile 文件内容如下所示:\
- export ARCH=arm64#设置平台架构
- export CROSS_COMPILE=aarch64-linux-gnu-#交叉编译器前缀
- obj-m += interrupt.o #此处要和你的驱动源文件同名
- KDIR :=/home/topeet/Linux/linux_sdk/kernel #这里是你的内核目录
- PWD ?= $(shell pwd)
- all:
- make -C $(KDIR) M=$(PWD) modules #make操作
- clean:
- make -C $(KDIR) M=$(PWD) clean #make clean操作
对于Makefile的内容注释已在上图添加,保存退出之后,来到存放interrupt.c和Makefile文件目录下,如下图(图42-1)所示:

图 42-1
然后使用命令“make”进行驱动的编译,编译如下图(图42-2)所示:
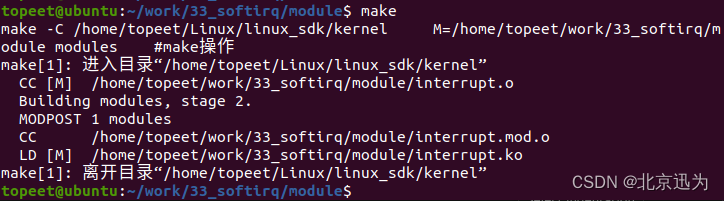
图 42-2
上图中提示open_softirq和raise_softirq没有被定义,但是为什么还会提示这样的错误呢?
这是因为Linux内核开发者不希望驱动工程师擅自在枚举类型中添加软中断。我们将这俩个函数导出到符号表,修改linux_sdk/kernel/kernel/softirq.c,修改内容如下(图42-3)所示:

图42-3
修改完成后,重新编译内核源码,编译源码通过后,再次编译驱动模块,如下图(图 42-4)所示:
图 42-4
编译完生成interrupt.ko目标文件,如下图(图42-5)所示:
 图 42-5
图 42-542.4.2 运行测试
开发板启动之后,使用以下命令进行驱动模块的加载,如下图(图42-6)所示:
insmod interrupt.ko

图42-6
驱动加载成功之后,可以看到申请的中断号被打印了出来,然后用手触摸连接的LVDS 7寸屏幕,触发中断服务程序,打印如下图(42-7)所示:

图 42-7
在上图中,可以看到打印中断处理函数中添加的打印“This is test_interrupt”和软中断处理函数中添加的打印“This is testsoft_func”
最后可以使用以下命令进行驱动的卸载,如下图(图42-8)所示:
rmmod interrupt
图 42-8
至此,软中断实验就完成了。

-
相关阅读:
Go语言适用场景
深入解析React DnD拖拽原理,轻松掌握拖放技巧!
拼接SQL语句的优雅姿势
MySQL-事务
HTML期末作业 蛋糕bootstrap响应式网站html+css+javascript+jquery+bootstarp
无监督学习
Go语言学习笔记—golang函数
如何克服答辩恐惧:从心理准备到实际应对
大二Web课程设计 HTML+CSS制作苹果商城网站 Apple商城 8个页面
【面试】——Java面试重难点剖析
- 原文地址:https://blog.csdn.net/BeiJingXunWei/article/details/133160865
