-
散列(哈希)查找的定义,常见的散列函数设计以及处理哈希冲突方法
1.散列表
1.散列表的定义
散列表(Hash Table),又称哈希表。
是一种数据结构,特点是:数据元素的关键字与其存储地址直接相关。特点:
- 若不同的关键字通过散列函数映射到同一个值,则称它们为“同义词”。
- 通过散列函数确定的位置已经存放了其他元素,则称这种情况为“冲突”。
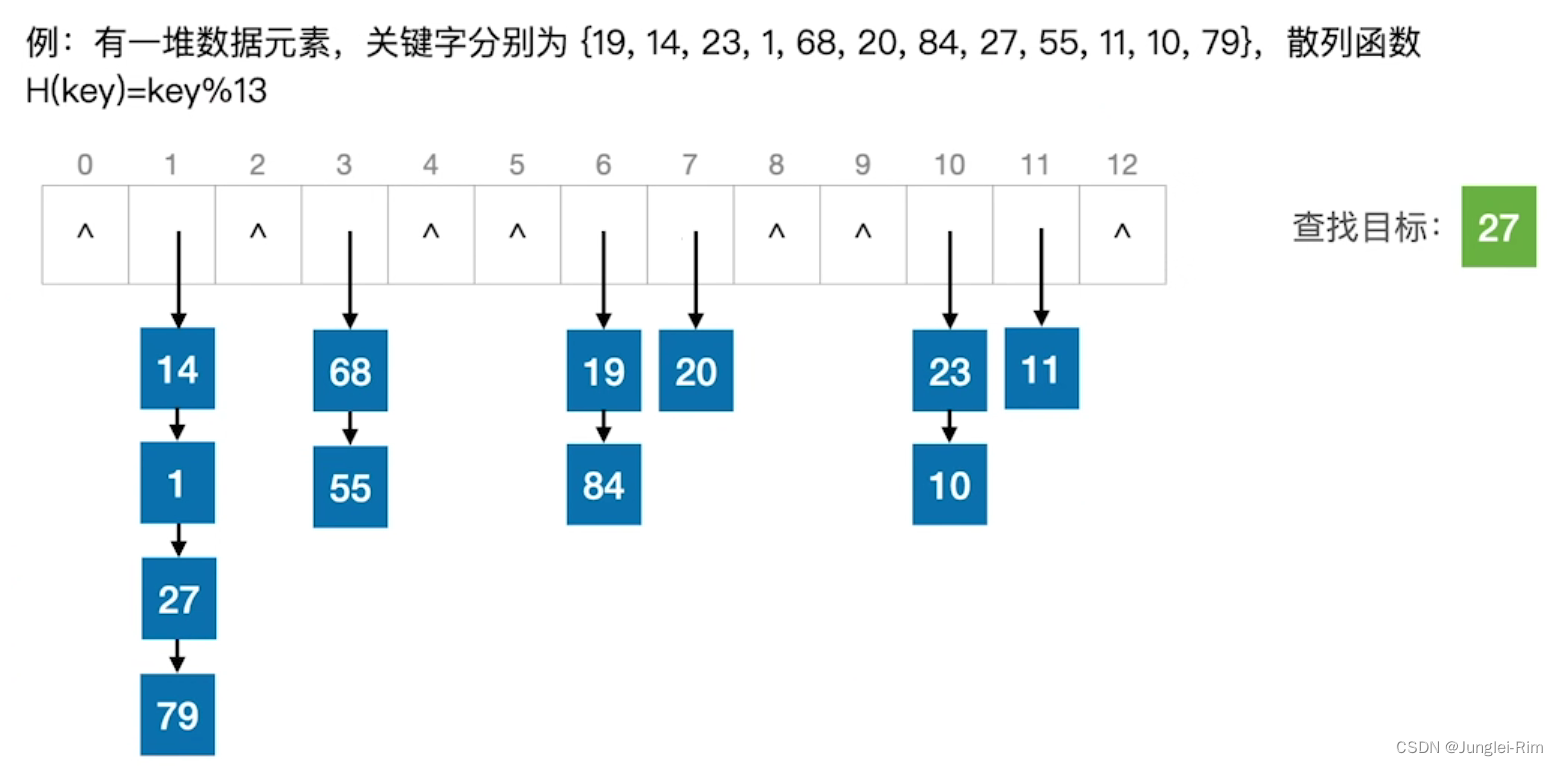
2.处理冲突的方法1:拉链法(链地址法)
用拉链法(又称链接法、链地址法)处理“冲突”:把所有“同义词”存储在一个链表中。
例如:
优化:在插入新元素时,保持关键字有序,可微微提高查找效率。2.散列查找
- 最理想情况:散列查找时间复杂度可到达O(1)。
- 装填因子α=表中记录数/散列表长度。
- 装填因子会直接影响散列表的查找效率。
3.常见散列函数的设计
散列函数的设计要结合实际的关键字分布特点来考虑,不要教条化。
对给定的关键字集合,应尽可能均匀地散列到各个地址,使冲突更少。
1.除留余数法
H ( k e y ) = ( k e y ) m o d ( p ) H(key) =( key)mod(p) H(key)=(key)mod(p)
散列表表长为m,取一个不大于m但最接近或等于m的质数p.- 质数又称素数。指除了1和此整数自身外,不能被其他自然数整除的数.
- 用质数取模。分布更均匀,冲突更少。
2.直接定址法
H ( k e y ) = k e y 或 H ( k e y ) = a ∗ k e y + b H(key) = key或H(key) = a*key + b H(key)=key或H(key)=a∗key+b
- 其中,a和b是常数。这种方法计算最简单,且不会产生冲突。
- 它适合关键字的分布基本连续的情况,
- 若关键字分布不连续,空位较多,则会造成存储空间的浪费。
3.数字分析法
选取数码分布较为均匀的若干位作为散列地址.
- 设关键字是r进制数〈如十进制数),而r个数码在各位上出现的频率不一定相同,可能在某些位上分布均匀一些,每种数码出现的机会均等;
- 而在某些位上分布不均匀,只有某几种数码经常出现,此时可选取数码分布较为均匀的若干位作为散列地址。
- 这种方法适合于已知的关键字集合,若更换了关键字,则需要重新构造新的散列函数。
4.平方取中法
取关键字的平方值的中间几位作为散列地址.
- 具体取多少位要视实际情况而定。
- 这种方法得到的散列地址与关键字的每位都有关系,因此使得散列地址分布比较均匀,
- 适用于关键字的每位取值都不够均匀或均小于散列地址所需的位数。
散列查找是典型的“用空间换时间”的算法,只要散列函数设计的合理,则散列表越长,冲突的概率越低。
4.处理冲突的方法2:开放地址法
所谓开放定址法,是指可存放新表项的空闲地址既向它的同义词表项开放,又向它的非同义词表项开放。其数学递推公式为∶
H i = ( H ( k e y ) + d i ) m o d ( m ) Hi= (H(key) + di) mod (m) Hi=(H(key)+di)mod(m)
i = 0 , 1 , 2... , k ( k ≤ m − 1 ) i = 0,1,2...,k (k≤m - 1) i=0,1,2...,k(k≤m−1),m表示散列表表长;di为增量序列;
i可理解为“第i次发生冲突”关于增量序列 d i di di的设计有:
1.线性探测法
d i = 0 , 1 , 2 , 3 , . . . , m − 1 ; di=0,1,2,3,..., m-1; di=0,1,2,3,...,m−1;
即发生冲突时,每次往后探测相邻的下一个单元是否为空 .1.查找操作
空位置的判断也要算作一次比较。
越早遇到空位置,就可以越早确定查找失败。2.删除操作
注意:采用“开放定址法"时,删除结点不能简单地将被删结点的空间置为空,否则将截断在它之后填入散列表的同义词结点的查找路径,可以做一个“删除标记”,进行逻辑删除。3.查找效率分析
弊端:当第一次冲突位置离目标较远时,看起来很满,实际上很空,花费较长的时间。初次探测的地址 Ho只有可能在 [ 0 , 12 ] [0,12] [0,12]
线性探测法很容易造成同义词、非同义词的“聚集(堆积)”现象,严重影响查找效率。
产生原因——冲突后再探测一定是放在某个连续的位置。2.平方探测法
当 d i = 0 2 , 1 2 , − 1 2 , 2 2 , − 2 2 , . . . . k 2 , − k 2 di= 0^2,1^2,-1^2,2^2,-2^2, .... k^2,-k^2 di=02,12,−12,22,−22,....k2,−k2时,称为平方探测法,
又称二次探测法其中 k ≤ m / 2 k≤m/2 k≤m/2- 平方探测法:比起线性探测法更不易产生“聚集(堆积)”问题。
- 非重点小坑:散列表长度m必须是一个可以表示成4j+3的素数,才能探测到所有位置。(数论)
3.伪随机序列法
di是一个伪随机序列,如di= 0,5,24,11,…
5.处理冲突的方法3:再散列法
再散列法(再哈希法)︰除了原始的散列函数H(key)之外,
多准备几个散列函数,当散列函数冲突时,
用下一个散列函数计算一个新地址,直到不冲突为止:
H = R H i ( K e y ) i = 1 , 2 , 3.... , k H= RHi(Key) i=1,2,3....,k H=RHi(Key)i=1,2,3....,k -
相关阅读:
Valine表白动态心跳源码
【Linux】完美解决ubuntu18.04下vi不能使用方向键和退格键
图新地球:如何导入修改了高程基准(椭球)的CAD文件
MYSQL调优之思路----sql语句和索引调优
进程的管理
设计模式-代理模式Proxy
编程之路:C++旅程回顾
java果蔬在线销售系统计算机毕业设计MyBatis+系统+LW文档+源码+调试部署
使用Mybatis-plus清空表数据
esp c3下载程序一直重启
- 原文地址:https://blog.csdn.net/qq_61888137/article/details/133132295