-
codesys虚轴
虚轴:
- Act 回馈
- Offset 末端设置
- SM_Drive_Virtual_1.fActPosition '电机反馈位置'
- SM_Drive_Virtual_1.fLastActVelocity '电机反馈速度'
- SM_Drive_Virtual_1.fLastPositionOffset '刀具末端位置偏置'
- SM_Drive_Virtual_1.fSetPosition '设置虚轴位置 LF' 危
SM3_Basic.AXIS_REF_VIRTUAL_SM3
AXIS_REF_SM3【父类】
- 【虚轴】是codesys的标准参考轴。
- 就跟房子的单位【平方】一样。
- 手轮/计数io/【自由编码器】--------|-----【虚轴】【凸轮】-----|--【自由编码器】
- 【虚轴】-------------| |--【虚轴】
- 【实轴ECAT】---------| |--【实轴ECAT】
- 【实轴CAN】----------| |--【实轴CAN】
- 【位置控制驱动器】----| |--【位置控制驱动器】
- 【虚轴】》齿轮比,凸轮等》【虚轴】
- 【虚轴】》【实轴】 //这个一般用于一拖多
- 【虚轴】》【脉冲轴】 //这个要看固件功能
- SMC_AXIS_STATE (ENUM) 状态:
- power_off 0 PLCopen calls this state: “Disabled”
- errorstop 1
- stopping 2
- standstill 3 '准备'
- discrete_motion 4
- continuous_motion 5
- synchronized_motion 6
- homing 7
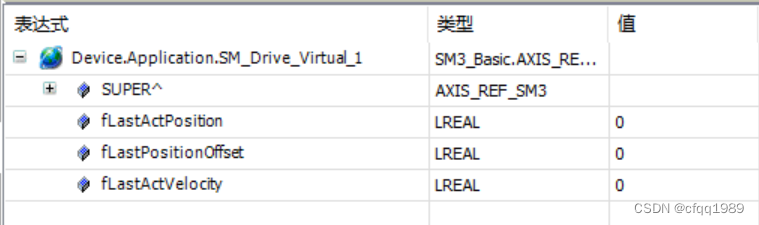 成员:
成员:SM_Drive_Virtual_1.fLastActPosition 最后电机反馈位置 12.3456
SM_Drive_Virtual_1.fLastPositionOffset 【刀具末端位置偏移】【父1215参数】
SM_Drive_Virtual.fLastActVelocity 最后电机反馈速度 0.00
修改虚轴坐标:
SM_Drive_Virtual_1.AXIS_REF_SM3.fActPosition

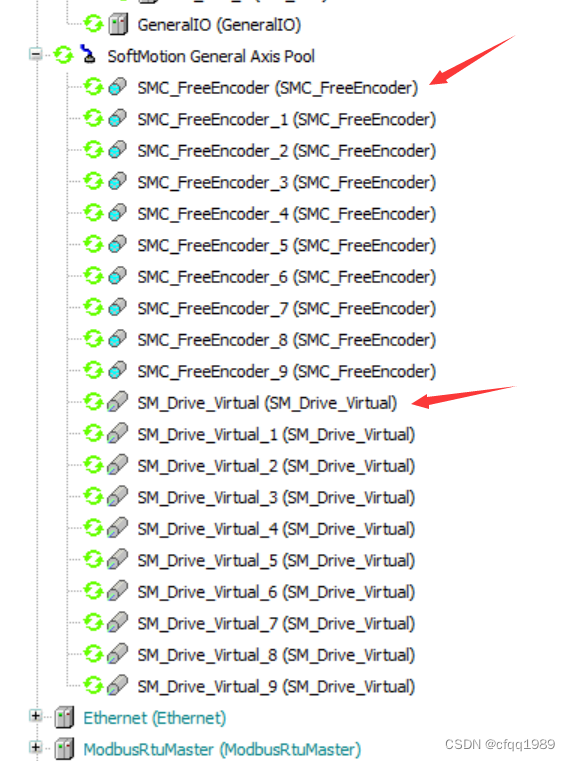
概述:codesys里有3个轴:
- 自由编码器 SM3_Basic.FREE_ENCODER_REF
- 【位置】.diEncoderPosition
- 禾川编码器 hsi_cnt.diCurCountValue; //编码器位置
- 虚轴 SM3_Basic.AXIS_REF_VIRTUAL_SM3
- 【位置】.fLastActPosition 'fActPosition'
- 【速度】.fLastActVelocity
- 实轴ECAT SM3_Drive_ETC_DS402_CyclicSync.AXIS_REF_ETC_DS402_CS;
- 【位置】.fLastActPosition fActPosition
- 【速度】.fLastActVelocity
- 实轴CAN _3SCOS.CANRemoteDevice
流程:【高速输入:采集AB脉冲】带》【自由编码器】带》【虚轴】带》【实轴】
1虚轴:
- 用法和实轴一样。一般用于,一拖多。
- 【手轮/高速输入/自由编码器】--------|-----【虚轴】-----|--【自由编码器】
- 【虚轴】-------------| |--【虚轴】
- 【实轴ECAT】---------| |--【实轴ECAT】
- 【实轴CAN】----------| |--【实轴CAN】
- 【位置控制驱动器】----| |--【位置控制驱动器】
2编码器带虚轴:
3虚轴带实轴:
GearIn和JOG必须在ecat线程内运行。【因为采集周期】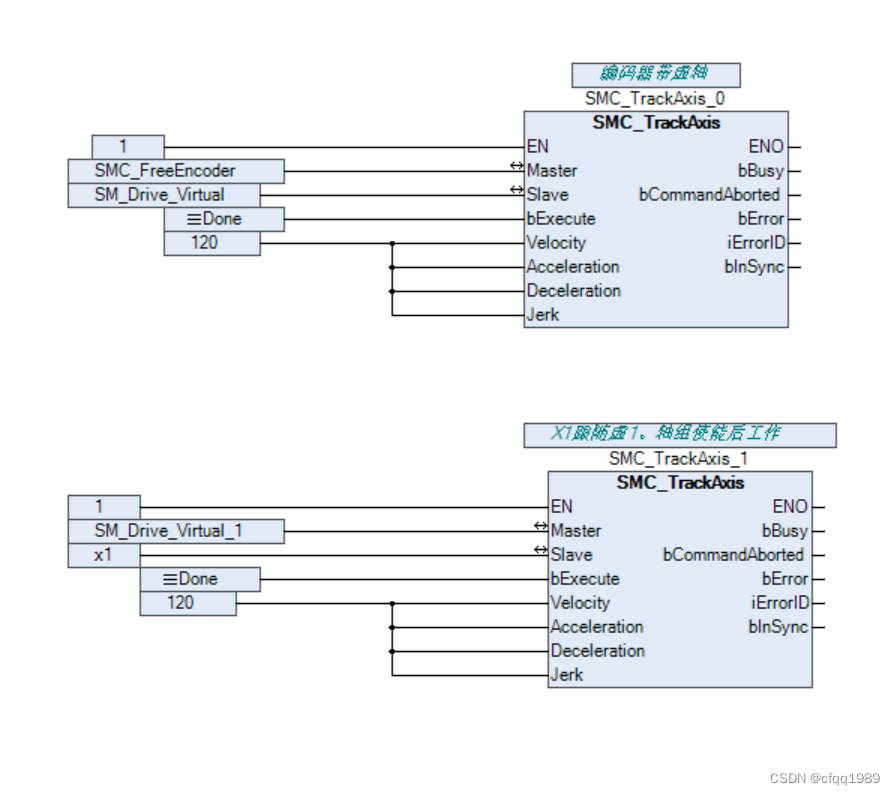
【1】计数io---位置:
【计数采集》自由编码器》虚轴》实轴】
采集的值由硬件完成,所以放哪个线程内不会影响采集精度。
- // QQ750273008 // 禾川Q---高速计数器
- // 硬件引脚:【A】【B】【Z】【锁存】 // Falling下降沿
- // 功能:【比较】【脉冲密度】【锁存】【重载】 //[Z]引脚用于重载值刷新
- // 输出:【密度值】【当前计数值】【锁存值】【计数器状态字】
- hsi_cnt(
- //【1】通道
- wDriveID:= 0, //【WORD】通道0~7,hsi_cnt到【hsi_cnt_7】
- //【2】计数总开关
- bCounterEnable:= 1 , //【BOOL】计数器功能使能位,高电平有效
- diCntMinValue:= -10000, //【DINT】 【当前计数值最小值 】
- diCntMaxValue:= 10000, //【DINT】 【当前计数值最大值 】
- // 计数模式
- wCountMode:= 2#0000,//【模式0】 //【WORD】计数模式与计数极性设置, bit[3] : 计数极性配置 ,bit[2:0] : 计数模式配置
- //[0]AB脉冲1倍速【A高电平时:B上升沿加,B下降沿减】
- //[1]AB脉冲2倍速
- //[2]AB脉冲4倍速
- //[3]【B脉冲加,A脉冲减 】 // 1相位2输入脚【上升沿】
- //[4]B脉冲,【引脚A低加高减】 // 1相位1硬件模式输入脚【B负责脉冲,A负责加减方向】
- //[5]B脉冲,【bSoftDirection标志位,低加高减】 // 1相位1软件模式输入脚
- bSoftDirection:= , //【BOOL】计数模式[5]时有效,低加高减
- //【3】比较值事件
- bEventEnable:=0 , //【BOOL】比较事件触发使能位,高电平有效 【产品打包计数】
- diEventCmpValue:= , //【DINT】比较值【比较计数值】,diEventCmpValue==diCurCountValue时, 将触发计数器比较一致事件
- //【4】脉冲密度
- bDspdEnable:=1 , //【BOOL】脉冲密度使能位,高电平有效,,,脉冲密度测量,单位时间设置【单位ms】
- wMeasureUnitTime:=1000 , //【WORD】脉冲密度测量,单位时间设置【单位ms】 // 单位时间内,获取脉冲数量
- //【5】锁存引脚 【和】Z脉冲脚
- bLatchEnable:=1 , //【BOOL】锁存开关,高电平有效,硬件脚触发,标记计数位置
- wHardTrgMethod:=2#00010001 , //【WORD】硬件触发端子,bit[6:4]: Latch【锁存端子】检查设置 ,bit[2:0]: 【Z相端子】检查设置
- // [0]边沿检测失能 【关闭】
- // [1]上升沿触发有效 【0001】
- // [2]下降沿触发有效 【0010】
- // [3]升降沿触发有效
- //【注:】Z脉冲用于刷新重载值
- bSoftPreTrg:= , //【BOOL】触发【重载】 当该位由0->1时,diSoftPreValue将被写入到diCurCountValue
- //【重载值】:填编码器圈脉冲 // [0]校零,解决脉冲干扰
- diSoftPreValue:=0 , //【DINT】计数【重载值】 ,当前计数预置值,Z相或【bSoftPreTrg】预置触发后, 该数值将被写入diCurCountValue
- BZport_sel:= 6, //【BYTE】 Z相端子选择
- // 0 : X0将被选择作为Z相端子
- // 1 : X1将被选择作为Z相端子
- // ........
- // 15 : X15将被选择作为Z相端子
- Blatch_sel:= 7, //【BYTE】 锁存端子选择
- // 0 : X0将被选择作为【锁存】端子
- // 1 : X1将被选择作为【锁存】端子
- // ........
- // 15 : X15将被选择作为【锁存】端子 // 16为其他端子
- //【6】备用
- wCmpoutCtrlword:= , //【WORD】 // 预留,v103版本支持
- //【7】状态字
- wStatus_clr:= , //【WORD】状态位清除字
- // bit0 预留
- // bit1 预留
- // bit2 锁存完成标记清除
- // bit3 硬件预置数触发完成标记清除
- // bit4 软件预置数触发完成标记清除
- // bit5 计数器下溢标记清除
- // bit6 计数器上溢标记清除
- // bit7 预留
- // bit8 比较中断触发标记清除
- // bit9 脉冲密度测量完成标记清除
- //
- bTabCmpEnable:= , //【BOOL】
- wStartNum:= , //【WORD】
- wEndNum:= , //【WORD】
- //========================================
- // C1脉冲密度:DINT;
- // C2当前计数值:DINT;
- // C3锁存值:DINT;
- // C4计数器状态字:WORD;
- diDspdFreqValue=> C1脉冲密度, //【DINT】 脉冲密度测量值
- diCurCountValue=> C2当前计数值 , //【DINT】 当前计数值
- diLatchData=> C3锁存值, //【DINT】 锁存值
- wCounterStatus=> C4计数器状态字); //【WORD】 计数器状态字
- //bit0: 计数器工作状态
- //bit1: 预留
- //bit2: 锁存完成标记
- //bit3: 硬件预置数触发完成
- //bit4: 软件预置数触发完成
- //bit5: 计数器下溢标记
- //bit6: 计数器上溢标记
- //bit7: 当前计数方向
- //bit8: 比较中断触发标记
- //bit9: 脉冲密度测量完成标记
- //
- SMC_FreeEncoder.diEncoderPosition:=hsi_cnt.diCurCountValue; //编码器位置
- //SMC_FreeEncoder.diEncoderPosition:=GVL.电位器1;
- // IoConfig_Globals.hsi_cnt.bSoftPreTrg ; // 编码器手动校零【 := True 】 // 解决编码器干扰
【2】位置---自由编码器:
SMC_FreeEncoder.diEncoderPosition:=hsi_cnt.diCurCountValue; //编码器位置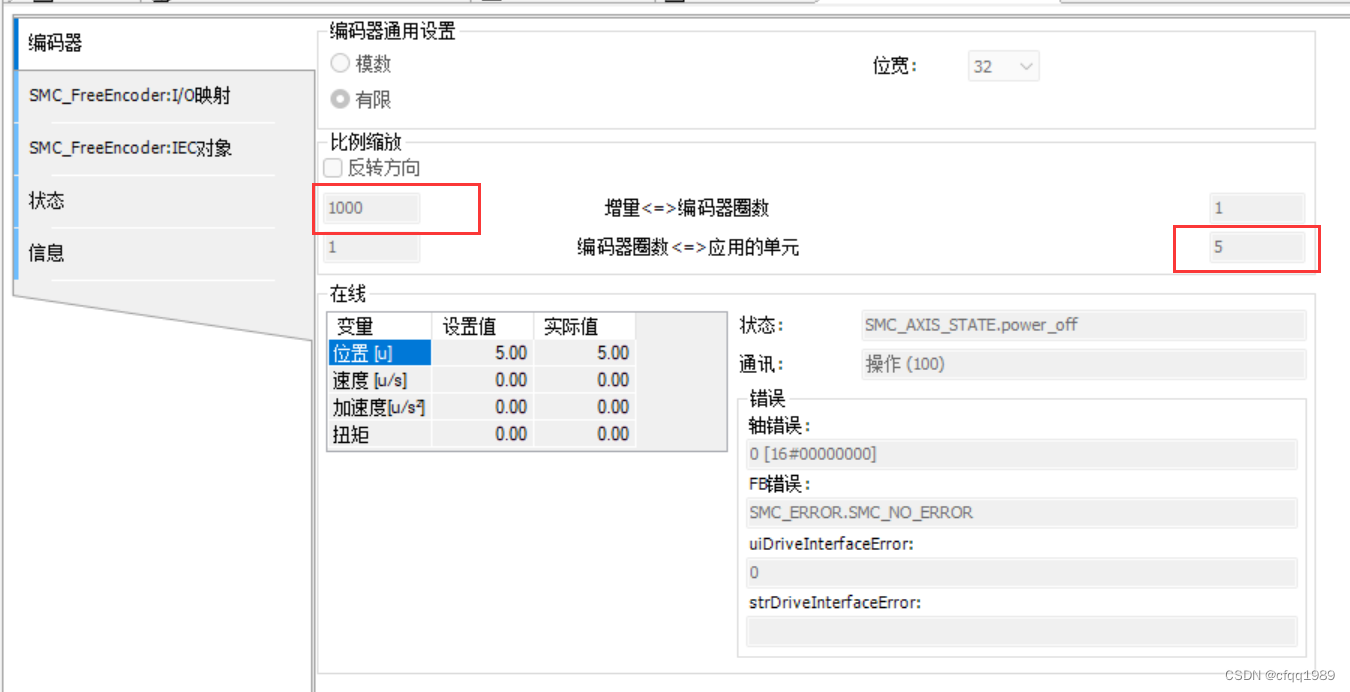
- 【增量】比【应用单元】
- 1000 : 5 // 作用是给编码器赋值1000,编码器导程是5mm
- 【模数】这个不起作用,只是用于可视化,转多少mm后,电机转一圈。默认360mm后转一圈。
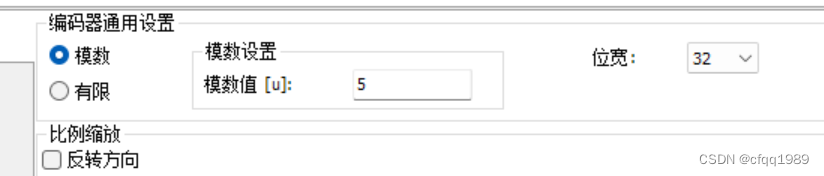
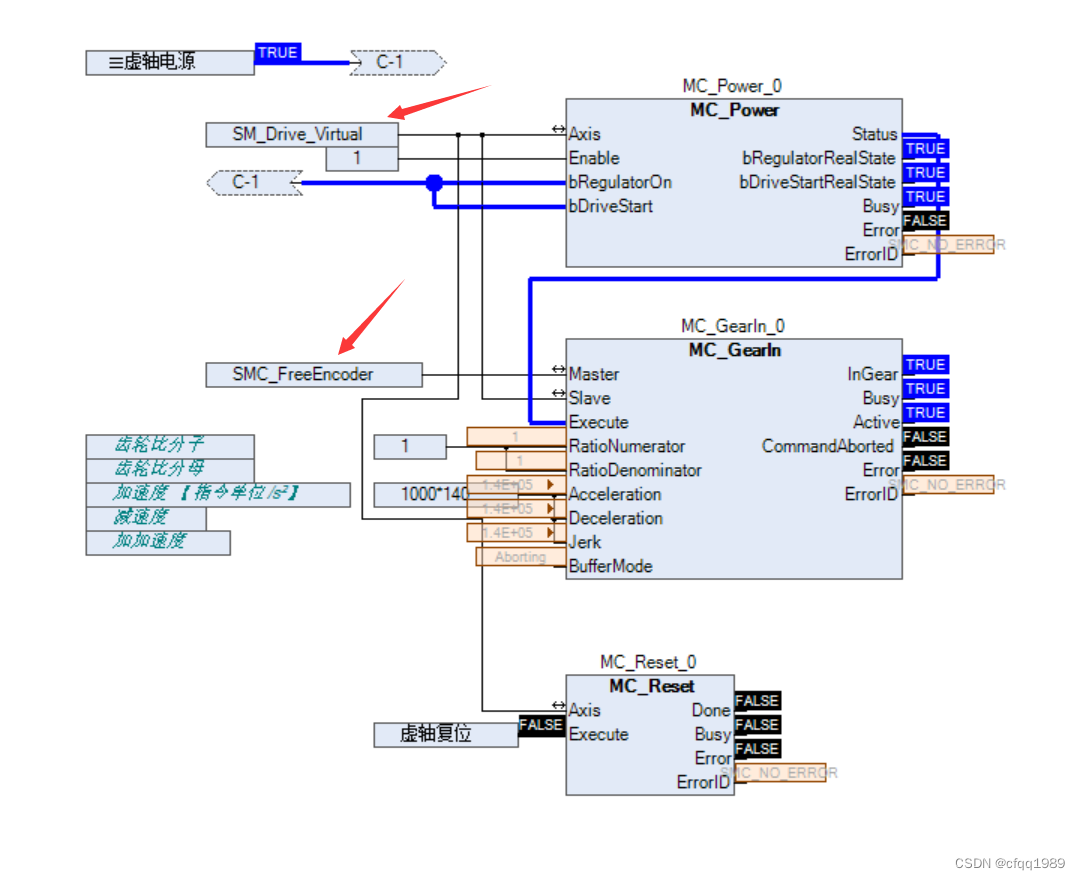
【3】自由编码器---虚轴:
- 虚轴【JOG】等函数,不能放在ecat线程内????? '放在MainTask'
- 同样只有【模数】这一个选项,用于导程mm
- 虚轴的作用是【一拖多】
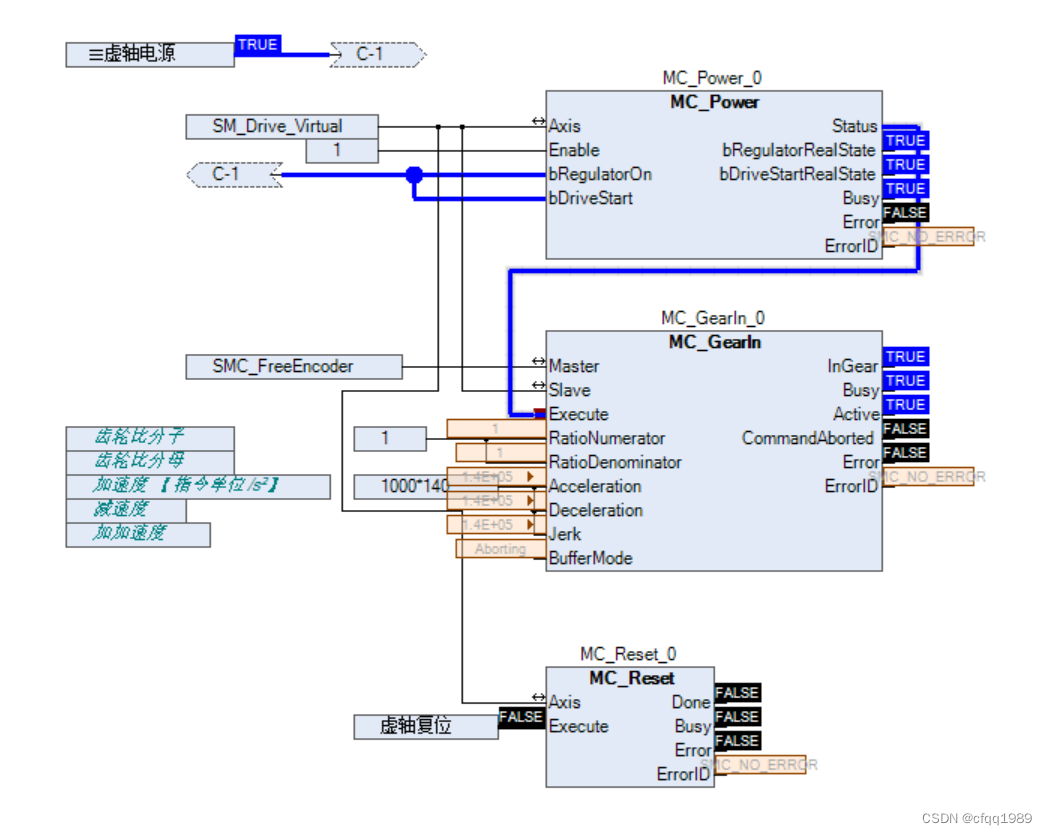
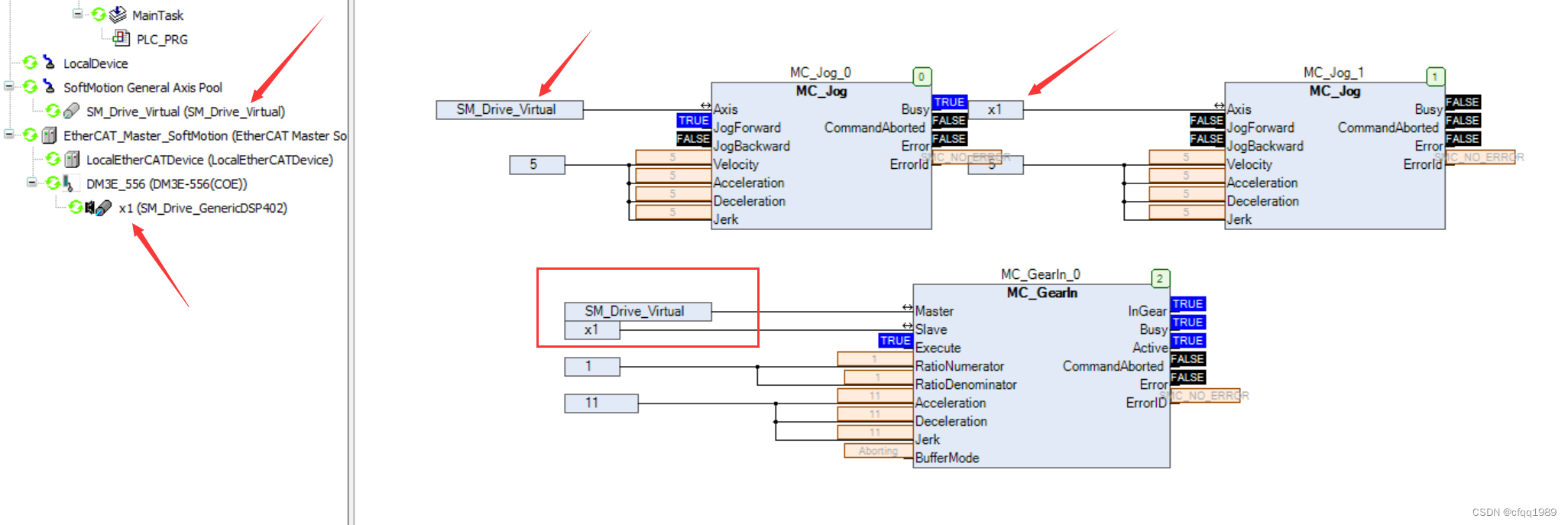
【4】虚轴---实轴Ecat:
每秒转速 := 每分钟转速 x 导程5 ÷ 60秒
125对应1500转 500对应6000转
- SMC_TrackAxis '跟随'
- MC_CamIn '电子凸轮'
- MC_GearIn '电子齿轮'
- 没加ecat总线时,【JOG】【POWER】函数在main线程内。
- 加了ecat后,【JOG】只能在ecat线程内运行
- Master/Slave '主/从 轴'
- MC_CamIn (FB) '电子凸轮'
- MC_CamOut (FB)
- MC_GearIn (FB) '电子齿轮'
- MC_GearInPos (FB) 指定位置切入同步
- MC_GearOut (FB)
- MC_Phasing (FB) 修改主从轴【相位】
- Direct '直接'
- SMC_FollowPosition (FB)
- SMC_FollowPositionVelocity (FB)
- SMC_FollowSetValues (FB)
- SMC_FollowVelocity (FB)
- SMC_SetTorque (FB)
- SMC_TrackAxis (FB)
- SMC_TrackSetValues (FB)
- Direct Axis Control '直接轴控制'
- SMC_ControlAxisByPos (FB) 位置
- SMC_ControlAxisByPosVel (FB) 位置速度
- SMC_ControlAxisByVel (FB) 速度
【5】位置---脉冲轴
- 编码器采集【位置】带【脉冲轴】无法实现,可变齿轮。
- 解决思路是:
- 【编码器】【自由编码器】【虚轴】{齿轮比}【虚轴】【脉冲轴】
【6】虚轴带---can轴:
回零后,再按下stop
先按stop后,再按【点动】
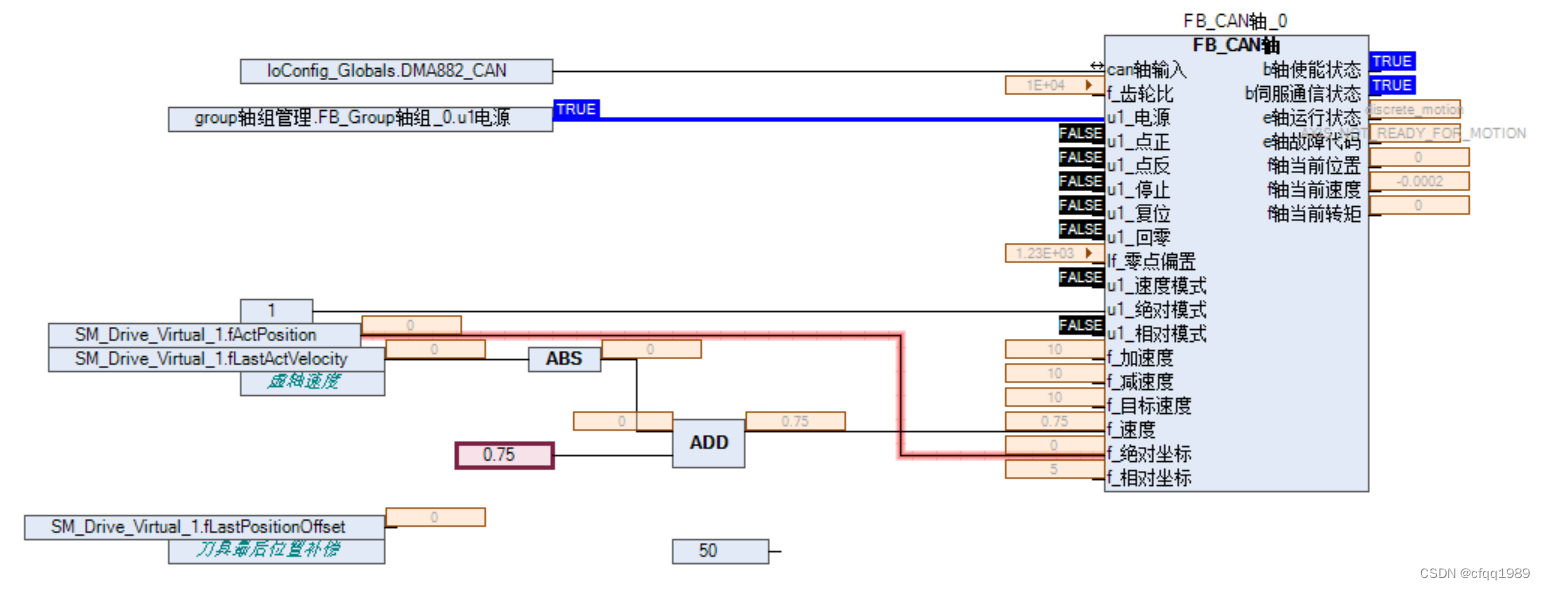
变量:
- FUNCTION_BLOCK FB_CAN轴
- VAR_IN_OUT
- can轴输入: _3SCOS.CANRemoteDevice;
- //ecat实轴输入:SM3_Drive_ETC_DS402_CyclicSync.AXIS_REF_ETC_DS402_CS;
- //axis: _3SCOS.CANRemoteDevice;//
- //编码器轴:SM3_Basic.FREE_ENCODER_REF;
- END_VAR
- VAR_INPUT
- f_齿轮比:REAL:=10000;// 齿轮比【圈脉冲】
- u1_电源:BOOL:=FALSE;// h6040
- u1_点正:BOOL:=FALSE;
- u1_点反:BOOL:=FALSE;
- u1_停止:BOOL:=FALSE;
- u1_复位:BOOL:=FALSE;
- u1_回零:BOOL:=FALSE;
- lf_零点偏置:LREAL:=1234;
- u1_速度模式:BOOL:=FALSE;
- u1_绝对模式:BOOL:=FALSE;
- u1_相对模式:BOOL:=FALSE;
- f_速度:REAL:=10;// h6081
- f_加速度:REAL:=10;// h6083
- f_减速度:REAL:=10;// h6084
- f_目标速度:REAL:=10;// h60FF
- f_绝对坐标:REAL:=5;// h607A
- f_相对坐标:REAL:=5;// h607A
- //=====================================
- // g6041:UINT:=16#250;//状态字
- // g6061:SINT;//模式
- // g6064:DINT;//位置
- // g606C:DINT;//速度
- // g6077:UINT;//力矩
- END_VAR
- VAR_OUTPUT
- //=============================================
- b伺服通信状态 :BOOL;
- e轴运行状态 :SMC_AXIS_STATE;
- e轴故障代码 :MC_ERROR_CO;
- f轴当前位置 :LREAL;
- f轴当前速度 :lREAL;
- f轴当前转矩 :REAL;
- END_VAR
- VAR
- //=======================
- x6041:UINT;// 状态字
- x6061:SINT;// 模式
- x6064:DINT;// 电机位置
- x606C:DINT;// 电机速度
- x6077:INT;// 电机力矩
- y6040:UINT;//控制字
- y6060:SINT;//模式
- y6081:UDINT;//速度
- y6083:UDINT;//加速
- y6084:UDINT;//减速
- y607A:DINT;//绝对坐标
- y60FF:DINT;//模式:速度
- y6071:INT;//模式:力矩
- y607C:DINT;//原点【偏置】
- //=====================================
- //AXIS: _3SCOS.CANRemoteDevice;// :=ADR(DMA882_CAN);
- Axis1: AXIS_REF_CO ; // 局部变量
- //==============================================
- MC_Power_CO :MC_Power_CO;
- MC_Home_CO :MC_Home_CO;
- MC_Reset_CO :MC_Reset_CO;
- MC_Stop_CO :MC_Stop_CO;
- MC_MoveVelocity_CO :MC_MoveVelocity_CO;//【速度模式】
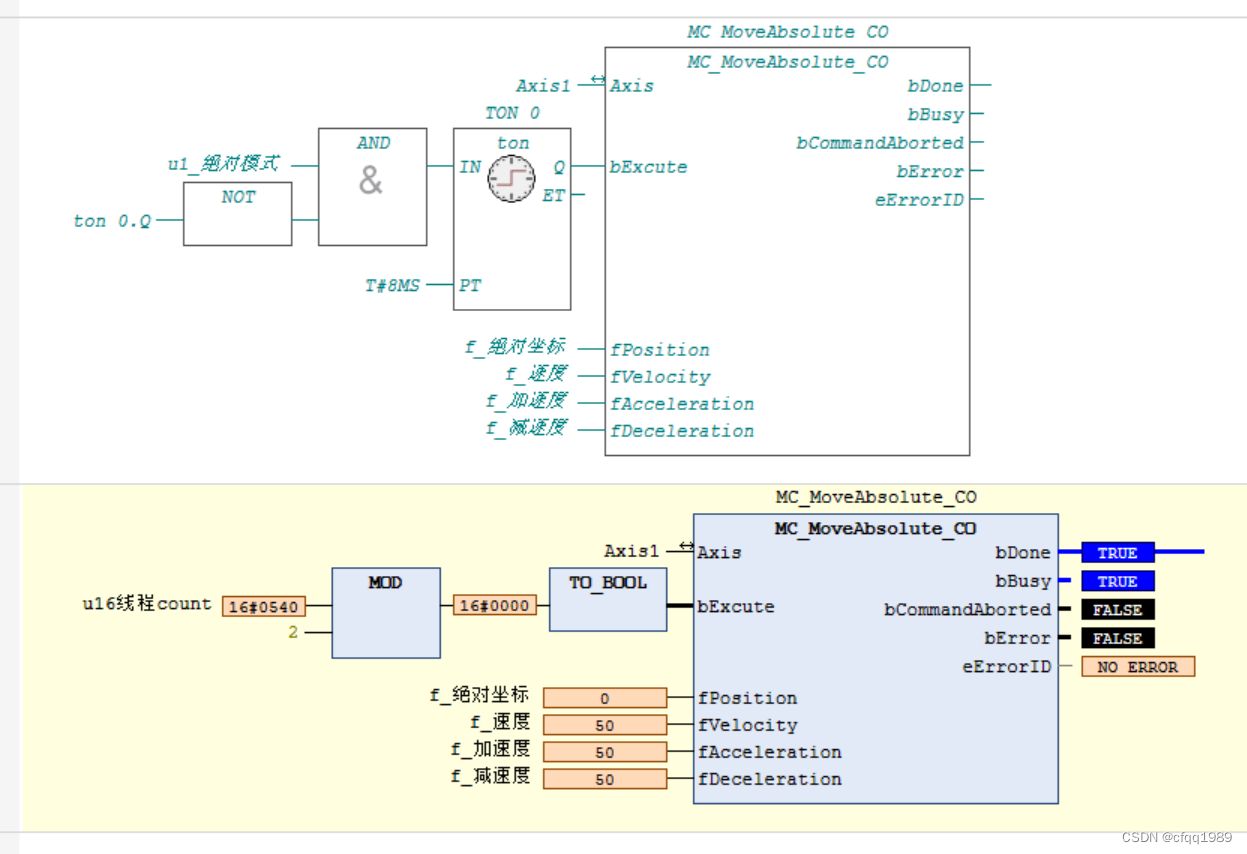
- MC_MoveAbsolute_CO :MC_MoveAbsolute_CO;//【绝对定位】
- MC_MoveRelative_CO :MC_MoveRelative_CO;//【相对定位】
- MC_Jog_CO :MC_Jog_CO;//【点动】
- TON_0: ton;//【刷新定位】
- u16线程count: UINT;
- END_VAR
程序:
- u16线程count:=u16线程count+1;
- axis1.pDevice:= ADR(can轴输入); //axis1.pDevice:= ADR(axis);
- axis1.In.wStatusWord:=x6041; // 状态字
- axis1.In.sActMode:=x6061; // 模式
- axis1.In.dActPosition:=x6064;// 电机位置
- axis1.In.dActVelocity:=x606C;// 电机速度
- axis1.In.dActTorque:=x6077; // 电机力矩
- // 修改0x6041默认值0x0250
- // IF gvl.h6041 = 16#0200
- // OR gvl.h6041 = 16#8270
- // OR gvl.h6041 = 16#0270
- //axis1.In.wStatusWord
- IF Axis1.In.wStatusWord =16#200 //【雷赛】默认0x0200,要改成 0x0250
- OR (Axis1.In.wStatusWord AND 16#0F) =16#00 // 8670,【xxx0】
- THEN
- Axis1.In.wStatusWord := 16#250;
- END_IF
- A00_功能块调用();
- y6040:=axis1.Out.wControlWord;
- y6060:=axis1.Out.sSetMode;
- y6083:=axis1.Out.dProfileAcc;
- y6084:=axis1.Out.dProfileDec;
- y607A:=axis1.Out.dTargetPos;
- y6081:=axis1.Out.dProfileVel;
- y60ff:=axis1.Out.dTargetVel;
- y6071:=axis1.Out.dTargetTor;//【力矩】
- y607C:=axis1.Out.dHomeOffset;// 原点偏置
- // 显示结果
- b伺服通信状态 :=Axis1.bCommunication; //---读取从站通信状态
- e轴运行状态 :=Axis1.nAxisState; //---读取轴运行状态
- e轴故障代码 :=Axis1.eErrorID[0]; //---读取当前的轴故障代码
- f轴当前位置 :=Axis1.fActPosition; //---读取伺服 反馈位置
- f轴当前速度 :=Axis1.fActVelocity; //---读取伺服 反馈速度
- f轴当前转矩 :=Axis1.fActTorque; //---读取伺服 反馈转矩
-
相关阅读:
【技术积累】HTML+CSS+JavaScript中的基础知识【四】
力扣解法汇总593-有效的正方形
pycharm+python研究生招生智能问答系统django+vue
mysql存储引擎
LeetCode 24.两两交换链表中的结点
网络编程
Spring AOP以及统一处理
vue 验证码 图片点击
蓝桥杯C/C++B组历届真题刷题【合集】
S环形避障装置研究与设计(solidworks)
- 原文地址:https://blog.csdn.net/cfqq1989/article/details/133131292
