-
STM32单片机——IIC概念与协议软件模及固件库配置
IC2协议简介
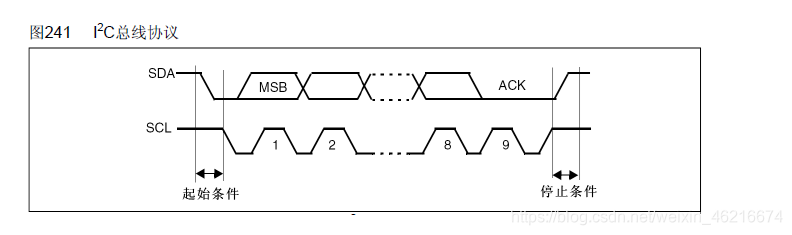
I2C 是很常见的一种总线协议,I2C 是飞利浦公司在80年代开发的两线式串行总线,用于连接微控制器及其外围设备。IIC属于半双工同步通信方式。I2C 使用两条线在主控制器和从机之间进行数据通信。
I2C协议总线构成
I2C 总线在物理连接上非常简单,分别由SDA(双向串行数据线)和SCL(串行时钟线)及上拉电阻组成。通信原理是通过对SCL和SDA线高低电平时序的控制,来产生I2C总线协议所需要的信号进行数据的传递。I2C通信方式为半双工,只有一根SDA线,同一时间只可以单向通信。每个连接到总线的设备都有一个独立的地址,主机可以利用这个地址进行不同设备直接的访问。下图是I2C总线系统结构具体电路原理图。

I2C总线物理层特点
- 总线通过上拉电阻接到电源。当IIC设备空闲时,会输出高阻态,而当所有设备都空闲,都输出高阻态,由上拉电阻把总线拉成高电平。
- 多个主机同时使用总线时,为了防止数据冲突,会利用仲裁方式决定哪个设备占用总线。
- 具有三种传输模式:标准模式传输速率为100kbit/s,快速模式为400kbit/s,高速模式下可达3.4M/s,但目前大多IIC设备尚不支持高速模式。
软硬件I2C比较
硬件IIC:对应芯片上的IIC外设,有相对应的IIC驱动电路,其所使用的IIC管教也是专用的;
软件IIC:一般是用GPIO管教,用软件控制管脚状态以及模拟IIC通信波形;
区别:
1. 硬件IIC的效率要远高于软件的,而软件IIC不受引脚限制,接口比较灵活。
2. 软件IIC是通过GPIO,软件模拟寄存器的工作方式,而硬件IIC是直接调用内部寄存器进行配置。如何区分?
1.硬件IIC用法复杂,模拟IIC流程更加清楚
2.硬件IIC速度比模拟快,并且可以用DMA
3.模拟IIC可以在任何管脚上,硬件IIC在固定管脚上I2C协议通信方式
- 宏定义
#define SCLK_Set() GPIO_SetBits(GPIOB, GPIO_Pin_0) //PB0(SCL)输出高 #define SCLK_CLr() GPIO_ResetBits(GPIOB, GPIO_Pin_0) //PB0(SCL)输出低 #define SDIN_Set() GPIO_SetBits(GPIOB, GPIO_Pin_1) //PB1(SDA)输出高 #define SDIN_CLr() GPIO_ResetBits(GPIOB, GPIO_Pin_1) //PB1(SDA)输出低 #define READ_SDIN() GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) //读取PB1(SDA)电平 #define IIC_ACK 0 //应答 #define IIC_NO_ACK 1 //不应答 //对应模拟I2C引脚IO口初始化 static void OLED_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStructure; //定义一个GPIO_InitTypeDef类型的结构体 RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE); //打开GPIOC的外设时钟 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1; //选择控制的引脚 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD; //设置为通用开漏输出 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置输出速率为50MHz GPIO_Init(GPIOB,&GPIO_InitStructure); //调用库函数初始化GPIOA SCLK_Set(); //设PC2(SCL)为高电平 SDIN_Set(); //设PC3(SDA)为高电平 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
空闲状态
- IIC总线的SDA和SCL两条信号线同时处于高电平时,规定位总线的空闲状态。
开始信号
- 当SCL为高电平期间,SDA由高到低的跳变;启动信号是一种电平跳变时序信号,而不是一个电平信号。
static void IIC_Start(void) { SCLK_Set(); //时钟线置高 SDIN_Set(); //数据线置高 delay_us(1); SDIN_CLr(); //数据线置低,数据发送从高到低跳变 delay_us(1); SCLK_CLr(); //时钟线置低 delay_us(1); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
停止信号
- 当SCL为高电平期间,SDA由低到高的跳变;停止信号也是一种高电平跳变时序信号,而不是一个电平信号。起始信号和停止信号一般由主机产生
static void OLED_IIC_Stop(void) { //时钟线高时,数据从低到高跳变 SDIN_CLr(); //数据线置低 delay_us(1); SCLK_Set(); //时钟线置高 delay_us(1); SDIN_Set(); //数据线置高 delay_us(1); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
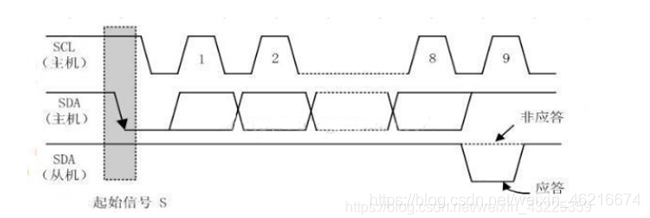
应答信号
- 发送器每发送一个字节,就在时钟脉冲9期间释放数据线,由接收器反馈一个应答信号。
- 应答信号为低电平时,规定为有效应答位(ACK简称应答位)表示接收器已经成功地接收了该字节;
- 应答信号为高电平时,规定为非应答位(NACK),一般表示接收器接收该字节没有成功。
- 对于反馈有效应答位ACK的要求是,接收器在第九个时钟脉冲之前的低电平期间将SDA线拉低,并且确保在该时钟的高电平期间为稳定的低电平。
//模拟I2C读取从机应答信号 static unsigned char IIC_Wait_Ack(void) { unsigned char ack; SCLK_CLr(); //时钟线置低 delay_us(1); SDIN_Set(); //信号线置高 delay_us(1); SCLK_Set(); //时钟线置高 delay_us(1); if(READ_SDIN()) //读取SDA的电平 ack = IIC_NO_ACK; //如果为1,则从机没有应答 else ack = IIC_ACK; //如果为0,则从机应答 SCLK_CLr();//时钟线置低 delay_us(1); return ack; //返回读取到的应答信息 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
数据的有效性
- IIC总线进行数据传输时
- 时钟信号为高电平,数据线上的数据必须保持稳定
- 时钟线上为低电平,数据线上电平状态才允许变化
- SDA数据线在SCL的每个时钟周期传输一位数据
即:数据在SCL的上升沿到来之前就需准备好。并在下降沿到来之前必须稳定

数据传输
- 在IIC总线上传送的每一位数据都有一个时钟脉冲相对应(或同步控制),即在SCL串行时钟的配合下,在SDA上逐位地串行传送每一位数据,高位先行。数据位的传输是边沿触发。
I2C读写数据函数
- I2C读取一个字节Byte
//I2C读取一个字节Byte static void Write_IIC_Byte(unsigned char IIC_Byte) { unsigned char i; //定义变量 for(i=0;i<8;i++) //for循环8次 { SCLK_CLr(); //时钟线置低,为传输数据做准备 delay_us(1); if(IIC_Byte & 0x80) //读取最高位 SDIN_Set(); //最高位为1 else SDIN_CLr(); //最高位为0 IIC_Byte <<= 1; //数据左移1位 delay_us(1); SCLK_Set(); //时钟线置高,产生上升沿,发送数据 delay_us(1); } SCLK_CLr(); //时钟线置低 delay_us(1); while(IIC_Wait_Ack());//从机应答 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- I2C写命令
//I2C写命令 static void Write_IIC_Command(unsigned char IIC_Command) { OLED_IIC_Start(); Write_IIC_Byte(0x78); //写入从机地址,SD0 = 0 Write_IIC_Byte(0x00); //写入命令 Write_IIC_Byte(IIC_Command);//数据 OLED_IIC_Stop(); //发送停止信号 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- I2C写入数据
static void Write_IIC_Data(unsigned char IIC_Data) { OLED_IIC_Start(); Write_IIC_Byte(0x78); //写入从机地址,SD0 = 0 Write_IIC_Byte(0x40); //写入数据 Write_IIC_Byte(IIC_Data);//数据 OLED_IIC_Stop(); //发送停止信号 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
I2C标准库结构体解析及程序设计
-
STM32 I2C的结构体
typedef struct { uint32_t I2C_ClockSpeed; //设置SCL时钟频率,不得高于4000000 uint16_t I2C_Mode; //指定I2C工作模式,可选I2C模式及SMBUS模式 uint16_t I2C_DutyCycle; //时钟占空比,可选low/high = 2:0 或 16:9 uint16_t I2C_OwnAddress1; //自身的I2C设备地址 uint16_t I2C_Ack; //使能或关闭相应,一般是使能 uint16_t I2C_AcknowledgedAddress; //指定地址长度,可为7或10 }I2C_InitTypeDef;- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
-
STM32 I2C常用库函数
//配置自身设备地址2 void I2C_OwnAddress2Config(I2C_TypeDef* I2Cx, uint8_t Address); //发送设备地址 void I2C_Send7bitAddress(I2C_TypeDef* I2Cx, uint8_t Address, uint8_t I2C_Direction); //接收数据 uint8_t I2C_ReceiveData(I2C_TypeDef* I2Cx); //停止接收 void I2C_AcknowledgeConfig(I2C_TypeDef* I2Cx, FunctionalState NewState); //外设开始正常工作 void I2C_Cmd(I2C_TypeDef* I2Cx, FunctionalState NewState);- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
-
I2C1 使能配置
void I2C_Configuration(void) { I2C_InitTypeDef I2C_InitStructure; GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB , ENABLE); //使能GPIOB时钟 RCC_APB1PeriphClockCmd( RCC_APB1Periph_I2C1, ENABLE ); //使能I2C1时钟 //PB6 --SCL ;PB7 --SDA GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD; //复用开漏 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7; //I2C1 SCL:PB6 SDA: PB7 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化GPIOB结构体 I2C_DeInit(I2C1); //初始化I2C1 I2C_InitStructure.I2C_Ack = I2C_Ack_Enable; //使能应答 I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit; //7位地址 I2C_InitStructure.I2C_ClockSpeed = 400000 ; //时钟速度 400K I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2 ; //2分频 16:9 I2C_InitStructure.I2C_Mode = I2C_Mode_I2C; //I2C模式 I2C_InitStructure.I2C_OwnAddress1 = 0X30 ; //主机地址 随便写 不影响 I2C_Init(I2C1,&I2C_InitStructure ); //初始化结构体 I2C_Cmd(I2C1,ENABLE); //使能I2C1 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
-
I2C写一个字节
//I2C写一个字节 void I2C_WriteByte(uint8_t addr,uint8_t data) { while (I2C_GetFlagStatus(I2C1, I2C_FLAG_BUSY)); //检查I2C总线是否繁忙 I2C_GenerateSTART(I2C1, ENABLE); //开启I2C1 while( !I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_MODE_SELECT)); //EV5,主模式 I2C_Send7bitAddress(I2C1,OLED_ADDRESS, I2C_Direction_Transmitter); //发送器件地址 while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED)); I2C_SendData(I2C1, addr); //寄存器地址 while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTING)); I2C_SendData(I2C1, data); //发送数据 while(!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTING)); I2C_GenerateSTOP( I2C1, ENABLE); //关闭I2C总线 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
-
I2C写命令
//写命令 void WriteCmd(unsigned char I2C_Command) { I2C_WriteByte(0X00,I2C_Command); }- 1
- 2
- 3
- 4
- 5
-
I2C写数据
//写数据 void WriteData(unsigned char I2C_Data) { I2C_WriteByte(0x40,I2C_Data); }- 1
- 2
- 3
- 4
- 5
-
相关阅读:
酷睿i9-13900K性能出炉Steam游戏开发首选驰网独家i9-13900K服务器水冷定制高主频游戏服务器
Unity之ShaderGraph如何实现飘动的红旗
2024年,提升Windows开发和使用体验实践 - 终端&命令行篇
java通过钉钉机器人发消息
Mysql和ES、Redis数据同步方案汇总
ctfshow web29-web40
RKMPP库快速上手--(四)MPP编码入门
数据结构 || 字符串匹配 BK KMP
Sigma 规则如何帮助解决网络安全技能短缺问题
Selenium:上传文件组件处理总结
- 原文地址:https://blog.csdn.net/weixin_46216674/article/details/133046257
