-
q-learning强化学习使用基础
强化学习
通过策略的方式来学习,q-learing(马尔科夫链模型)
马尔科夫链:奖励*折扣因子,R(t)=reward(1)+yR(t+1),马尔可夫链多次迭代后分布趋于稳定所以可以得到最优解
q-learning
- 构建qtable,二维数组包含两个维度,state、action,qtable迭代过程中值不大于1
- action1 action2 action3 state1 state2 state3 action更新公式:Q(s,a)←Q(s,a)+α[reward+γmax′Q(s′,a′)−Q(s,a)]
给每个action打分,最后使用numpy的argmax得到最大值索引
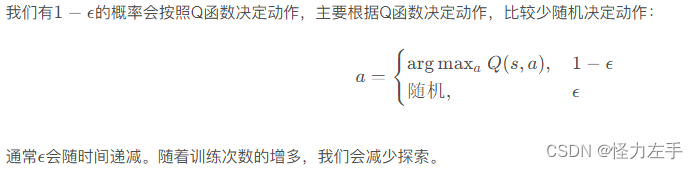
γ折扣因子,值越大,当前action权重越大,否者历史action权重大训练过程引入贪心算法
gym使用
import gym quit = False env = gym.make("CartPole-v1", render_mode="human") print(env.observation_space,env.action_space) state = env.reset() #reset返回env内在的状态4参数,qtable的state=4个参数组成一个state值,再根据state的参数范围,划分出n个状态,action=0,1左右2个值 while not quit: env.render() env.step(1)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
官方demo
env = gym.make('CartPole-v0') for i_episode in range(20): observation = env.reset() #初始化环境每次迭代 for t in range(100): env.render() #显示 print(observation) action = env.action_space.sample() #随机选择action observation, reward, done, info = env.step(action) if done:#判断游戏是否结束 print("Episode finished after {} timesteps".format(t+1)) break env.close()- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
q-learning
官方demo,gym的reward奖励不需要自己构建,gym会根据用户操作给出相应的reward值,step函数返回
alpha = 0.8 nstate = 50 #划分状态区间,平衡游戏只在初始位置有效,平均划分状态值不好训练 gamma = 1 #衰减因子 env = gym.make("CartPole-v0", render_mode="human") table = np.zeros((nstate,nstate,nstate,nstate,env.action_space.n))#左右两个action print(env.observation_space,env.action_space) for i in range(10000): t=0 observation = env.reset() high = env.observation_space.high low = env.observation_space.low high[1]=high[3]=10 #重新定义取值范围,否则state索引位置不变化 low[1]=low[3]=-10 #重新定义取值范围,否则state索引位置不变化 while True: env.render() div = (high-low)/nstate state = tuple(((observation[0]-env.observation_space.low)/div).astype(int)) if np.random.random() < 0.3:#随机选择 action = env.action_space.sample() else: action = np.argmax(table[state]) t+=1 observation = env.step(action) table[state][action] += (alpha*(observation[1]+ gamma * np.max(table[state])-table[state][action])) if observation[2]: print("{} Episode finished after {} timesteps".format(state,t+1)) break;- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
小车爬山的例子
env = gym.make("MountainCar-v0", render_mode="human") n_states = 40 iter_max = 10000 gamma = 1.0 epsilon = 0.3 alpha = 0.5 def obs_to_state(obs): #把参数范围划分40个状态,求当前值在哪个状态区间 env_low = env.observation_space.low env_high = env.observation_space.high env_dx = (env_high - env_low) / n_states state_index = tuple(((obs - env_low) / env_dx).astype(int)) return state_index Q = np.zeros((n_states, n_states, env.action_space.n)) obs = env.reset() s = obs_to_state(obs[0]) while True: env.render() if np.random.uniform(0, 1) < epsilon: a = env.action_space.sample() else: a = np.argmax(Q[s]) obs = env.step(a) if obs[2]: break next_s = obs_to_state(obs[0]) td_target = obs[1] + gamma * np.max(Q[next_s]) td_error = td_target - Q[s][a] Q[s][a] += alpha * td_error s = next_s print(Q)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
保存参数值
numpy.save(“1”,qtable)
numpy.load(“1”)qtable保存,每次使用qtable的结果执行,训练过程中保存state的多维数组的索引都有遍历到,去掉随机因子就可以使用qtable决策了,qtable需要遍历所有的qtable得到一个稳定的结果,训练太慢可以是DQN网络
在gym以外的其他游戏,需要自定义reward奖励,每个状态的奖励值差别越大学习越快。
q-learning适用于离散的运动,连续的状态变换效果不是很好
-
相关阅读:
如何在复现LaneNet车道线检测项目时,采用网上博主制作数据集的方法来只做自己的数据集,当把此数据集投喂进网络训练时(采用Pytorch库)会报如下的错误?
Redis集群的三种配置方式案例
请查收 | Navicat 热门技术问答
栈、队列和数组
第七章 Spring依赖注入(注解方式)与整合MyBatis
Linux--多线程(一)
软件工程方法论
【树莓派】windows和树莓派之间文件共享(Samba)
使用Go语言测试Redis性能
JS 流行框架(六):Animate
- 原文地址:https://blog.csdn.net/daoer_sofu/article/details/133013871
