-
STM32的HAL库SPI操作(master 模式)-根据时序图配置SPI
SPI相关基础知识
SPI基本概念请自行百度,参考:百度百科SPI简介.我们讲重点和要注意的地方。
master模式下要关注的地方
接线一一对应
也就是说主控的MISO,MOSI,SCLK,[CSn]分别和设备的MISO,MOSI,SCLK,[CSn]一一对应相连,不交叉,不交叉,不交叉…(重要的事情说三遍)。
从设备的时序图
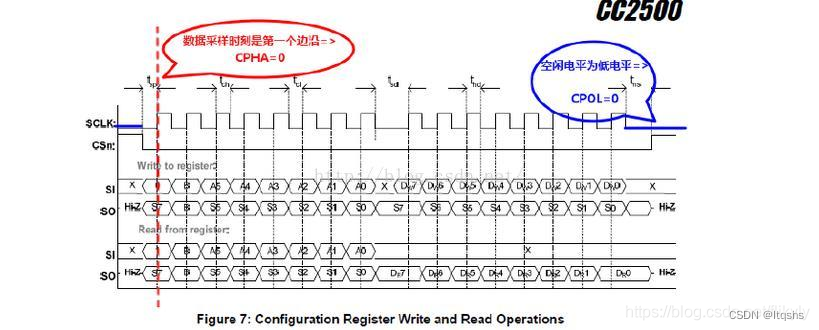
这是无线模块CC2500的SPI接口时序,这里可以看到,从设备要求,1、时钟空闲时为低电平;2、数据在时钟下降沿跳变,上升沿稳定,第1个沿为数据采样点;3、高位先发送;4、数据长度8位;
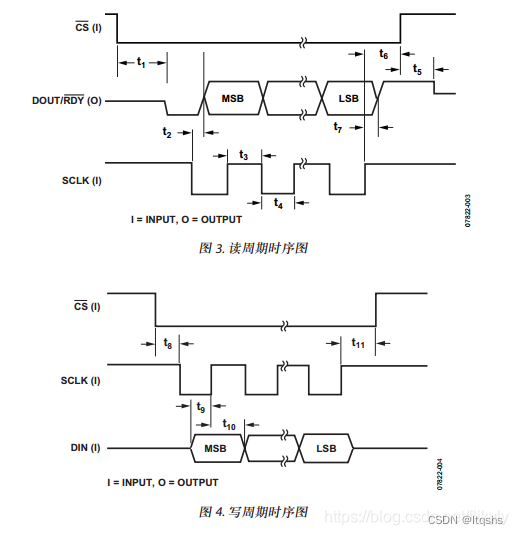
这是AD7192的SPI接口时序,这里可以看到从设备要求,1、时钟空闲时为高电平;2、数据在时钟下降沿跳变,上升沿稳定,第2个沿为数据采样点;3、高位先发送;4、数据长度8位;
我们的master模式要根据从设备的时序要求来设置参数,才能正常访问设备。初始化参数
STM32CubeMX是一个比较好用的可视化工具,具体使用方法参考官方文档,这里看重点:
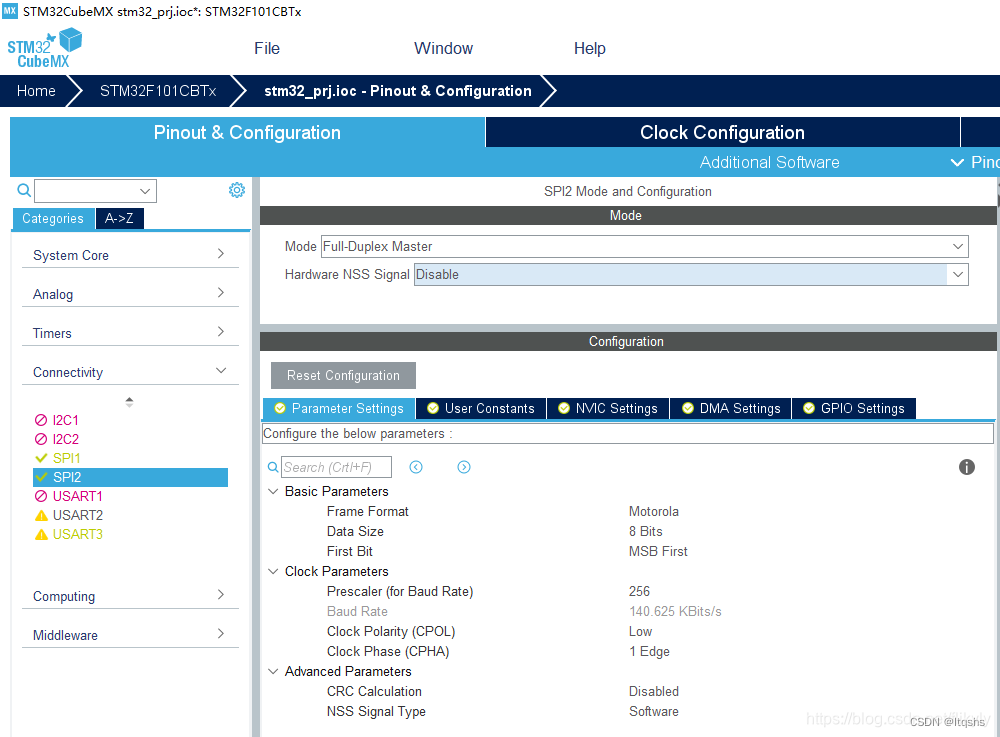
这是连接上面那个AD7192芯片的配置,生成代码后,我们看它的设置:
/* SPI2 init function */ void MX_SPI2_Init(void) { hspi2.Instance = SPI2; hspi2.Init.Mode = SPI_MODE_MASTER; //MASTER模式 hspi2.Init.Direction = SPI_DIRECTION_2LINES; hspi2.Init.DataSize = SPI_DATASIZE_8BIT; //一个数据8位 hspi2.Init.CLKPolarity = SPI_POLARITY_HIGH; //时钟空闲为高电平 hspi2.Init.CLKPhase = SPI_PHASE_2EDGE; //第二个跳变采样数据 hspi2.Init.NSS = SPI_NSS_SOFT; //软件设置CS hspi2.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_256; hspi2.Init.FirstBit = SPI_FIRSTBIT_MSB; //高位在前 hspi2.Init.TIMode = SPI_TIMODE_DISABLE; //禁用TI模式 hspi2.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE; //禁用CRC校验 hspi2.Init.CRCPolynomial = 10; if (HAL_SPI_Init(&hspi2) != HAL_OK) { Error_Handler(); } } //引脚配置,自动生成,一般不用修改 void HAL_SPI_MspInit(SPI_HandleTypeDef* spiHandle) { GPIO_InitTypeDef GPIO_InitStruct = {0}; if(spiHandle->Instance==SPI2) { /* SPI2 clock enable */ __HAL_RCC_SPI2_CLK_ENABLE(); __HAL_RCC_GPIOB_CLK_ENABLE(); /**SPI2 GPIO Configuration PB13 ------> SPI2_SCK PB14 ------> SPI2_MISO PB15 ------> SPI2_MOSI */ GPIO_InitStruct.Pin = ADC_SCLK_Pin|ADC_MOSI_Pin; GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); GPIO_InitStruct.Pin = ADC_MISO_Pin; GPIO_InitStruct.Mode = GPIO_MODE_INPUT; GPIO_InitStruct.Pull = GPIO_NOPULL; HAL_GPIO_Init(ADC_MISO_GPIO_Port, &GPIO_InitStruct); } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
查询、中断还是DMA?
总的来说一句话就是,根据需要来决定,因为我们是接的低速AD芯片,所以直接用查询方式就够了,函数定义:
//SPI2,master模式,读写一个字节操作 //TxData:要写入的字节 //返回值:读取到的字节 uint8_t SPI2_ReadWriteByte(uint8_t TxData) { uint8_t Rxdata; HAL_SPI_TransmitReceive(&hspi2,&TxData,&Rxdata,1, 1000); return Rxdata; //返回收到的数据 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
-
相关阅读:
centos安装kingbase(人大进仓)数据库
面向对象分析与设计_用例图
计算机公共课面试常见问题:线性代数篇
java基于springboot+vue+elementui的会员制在线读书图书购物管理平台
golang优雅退出
软件产品确认测试包括哪些方面
fastjson漏洞复现
机器学习-集成学习LightGBM
IPV4的未来替代品!一文读懂IPV6的优势特点和地址类型
【最佳实践】CentOS7.9 下绿色安装最新版本的 Tomcat-10.1.2 以及最新的 Java19
- 原文地址:https://blog.csdn.net/qq_21794157/article/details/132974415
