-
广义模态控制实例
在广义模态控制一文中,笔者介绍了广义模态控制的思路以及算法。本文将举一个简单的广义模态控制的例子,以加深理解。
1. 原系统
取原开环系统的传递函数为
G ( s ) = 2 15 s 2 + s G ( {\rm s} ) = \frac{2}{15 {\rm s}^2 + {\rm s} } G(s)=15s2+s2可见其有一个零极点,处于临界稳定,当外界输入为阶跃信号时,系统将直接变成不稳定系统。因此,不妨直接来看其闭环单位负反馈系统 W ( s ) W ( {\rm s} ) W(s):
W ( s ) = G ( s ) 1 + G ( s ) = 2 15 s 2 + s + 2 W ( {\rm s} ) = \frac{G ({\rm s}) }{1 + G( {\rm s}) } = \frac{2}{15 {\rm s}^2 + {\rm s} + 2} W(s)=1+G(s)G(s)=15s2+s+22其阶跃响应为: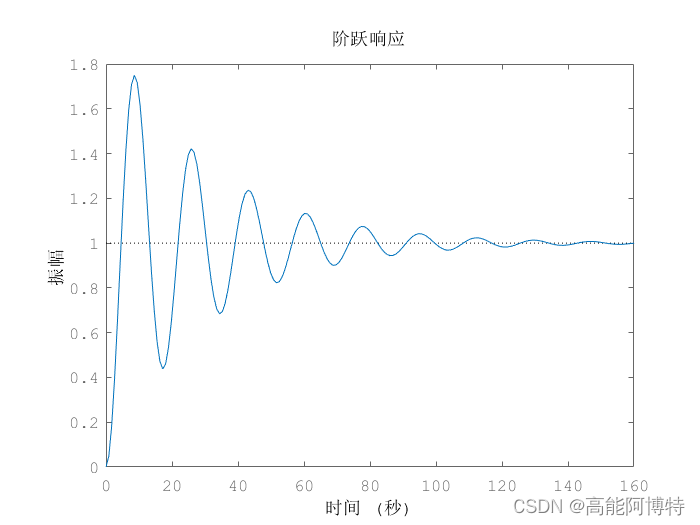
可以看出,原闭环系统是趋于稳定的,但其缺点很明显:振荡过多,超调十分大,调节时间过长,整个系统的谐振性很明显,显然是不能应用于实际的。2. 调节器设计
原系统为2阶系统,则调节器的最低阶数应当为 ν = n − 1 = 1 \nu = n-1 = 1 ν=n−1=1阶。不妨就设计一阶调节器:
R ( s ) = Q ( s ) P ( s ) = q 1 s + q 0 s + p 0 R({\rm s}) = \frac{Q({\rm s})} {P({\rm s})} = \frac{q_1 {\rm s} + q_0}{{\rm s} + p_0} R(s)=P(s)Q(s)=s+p0q1s+q0在把调节器传入前馈通路后,得到的系统的闭环传函为
W c ( s ) = R ( s ) G ( s ) 1 + R ( s ) G ( s ) = q 1 s + q 0 s + p 0 2 15 s 2 + s 1 + q 1 s + q 0 s + p 0 2 15 s 2 + s = 2 ( q 1 s + q 0 ) s ( 15 s + 1 ) ( s + p 0 ) + 2 ( q 1 s + q 0 ) = 2 ( q 1 s + q 0 ) 15 s 3 + ( 15 p 0 + 1 ) s 2 + ( p 0 + 2 q 1 ) s + 2 q 0Wc(s)=1+R(s)G(s)R(s)G(s)=1+s+p0q1s+q015s2+s2s+p0q1s+q015s2+s2=s(15s+1)(s+p0)+2(q1s+q0)2(q1s+q0)=15s3+(15p0+1)s2+(p0+2q1)s+2q02(q1s+q0)设期望得到的系统拥有3个极点: − 0.1 , − 0.2 , − 0.2 -0.1, -0.2, -0.2 −0.1,−0.2,−0.2,则期望系统的特征方程(即传函分母)为:W c ( s ) = R ( s ) G ( s ) 1 + R ( s ) G ( s ) = q 1 s + q 0 s + p 0 2 15 s 2 + s 1 + q 1 s + q 0 s + p 0 2 15 s 2 + s = 2 ( q 1 s + q 0 ) s ( 15 s + 1 ) ( s + p 0 ) + 2 ( q 1 s + q 0 ) = 2 ( q 1 s + q 0 ) 15 s 3 + ( 15 p 0 + 1 ) s 2 + ( p 0 + 2 q 1 ) s + 2 q 0
( s + 0.1 ) ( s + 0.2 ) 2 ( {\rm s} + 0.1 ) ( {\rm s} + 0.2 )^2 (s+0.1)(s+0.2)2于是,为使调节后的系统达到期望的系统指标,应当使调节后的系统具有所期望的极点分布,即:传递函数的分母应当相同:
15 s 3 + ( 15 p 0 + 1 ) s 2 + ( p 0 + 2 q 1 ) s + 2 q 0 = ( s + 0.1 ) ( s + 0.2 ) 2 15{\rm s}^3 + \left( 15p_0 + 1 \right){\rm s}^2 + \left( p_0 + 2q_1 \right){\rm s} + 2q_0 = ( {\rm s} + 0.1 ) ( {\rm s} + 0.2 )^2 15s3+(15p0+1)s2+(p0+2q1)s+2q0=(s+0.1)(s+0.2)2对照系数可以直接得到
p 0 = 13 30 , q 1 = 23 60 , q 0 = 3 100 , p_0 = \frac{13}{30}, \quad q_1 = \frac{23}{60}, \quad q_0 = \frac{3}{100}, p0=3013,q1=6023,q0=1003, R ( s ) = q 1 s + q 0 s + p 0 = 11.5 s + 0.9 30 s + 13 R({\rm s}) = \frac{q_1 {\rm s} + q_0}{{\rm s} + p_0} = \frac{11.5 {\rm s} + 0.9}{30{\rm s} + 13} R(s)=s+p0q1s+q0=30s+1311.5s+0.93. 加入调节器后的系统
加入调节器后的闭环传函为
W c ( s ) = 2 ( q 1 s + q 0 ) 15 s 3 + ( 15 p 0 + 1 ) s 2 + ( p 0 + 2 q 1 ) s + 2 q 0 = 23 s + 1.8 450 s 3 + 225 s 2 + 36 s + 1.8 W_c({\rm s}) = \frac{2 \left( q_1 {\rm s} + q_0 \right)}{ 15{\rm s}^3 + \left( 15p_0 + 1 \right){\rm s}^2 + \left( p_0 + 2q_1 \right){\rm s} + 2q_0 } = \frac{ 23{\rm s} +1.8 }{ 450{\rm s}^3 +225{\rm s}^2 + 36{\rm s} + 1.8 } Wc(s)=15s3+(15p0+1)s2+(p0+2q1)s+2q02(q1s+q0)=450s3+225s2+36s+1.823s+1.8该系统的阶跃响应与原系统的阶跃响应对比图如下:

上图中红线为调节后闭环系统,蓝线为原闭环系统。可以看出,加入所设计的一阶调节器后,系统的振荡消失,调节时间大大减小,超调几乎为零,响应速度加快,有很好的控制效果,已经可以应用于实际。
-
相关阅读:
一款超好用的开源密码管理器?
如何使用 人像比对API
CSS3 新增属性-边框圆角-文字阴影-盒子阴影
网络安全(黑客)自学
正则表达式提取返回报文data里面的\“id\“:312254,的值
【Web】NodeJs相关例题wp
仿真1. 什么是仿真系统
如何开发LAXCUS分布式应用软件
【Linux】 df命令使用
【GAN对抗性损失函数】以CycleGAN和PIX2PIX算法的对抗性损失的代码为例进行讲解
- 原文地址:https://blog.csdn.net/weixin_58399148/article/details/132956452