-
ELAS库计算双目视差图
ELAS源码下载:https://www.cvlibs.net/download.php?file=libelas.zip
代码结构目录
修改/src/main.cpp如下:/* Copyright 2011. All rights reserved. Institute of Measurement and Control Systems Karlsruhe Institute of Technology, Germany This file is part of libelas. Authors: Andreas Geiger libelas is free software; you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation; either version 3 of the License, or any later version. libelas is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details. You should have received a copy of the GNU General Public License along with libelas; if not, write to the Free Software Foundation, Inc., 51 Franklin Street, Fifth Floor, Boston, MA 02110-1301, USA */ // Demo program showing how libelas can be used, try "./elas -h" for help #include#include "elas.h" #include "image.h" #include #include #include #include #include #include "opencv2/imgproc/imgproc_c.h" using namespace std; // compute disparities of pgm image input pair file_1, file_2 void process (const char* file_1,const char* file_2) { cout << "Processing: " << file_1 << ", " << file_2 << endl; // load images image *I1,*I2; I1 = loadPGM(file_1); I2 = loadPGM(file_2); // check for correct size if (I1->width()<=0 || I1->height() <=0 || I2->width()<=0 || I2->height() <=0 || I1->width()!=I2->width() || I1->height()!=I2->height()) { cout << "ERROR: Images must be of same size, but" << endl; cout << " I1: " << I1->width() << " x " << I1->height() << ", I2: " << I2->width() << " x " << I2->height() << endl; delete I1; delete I2; return; } // get image width and height int32_t width = I1->width(); int32_t height = I1->height(); // allocate memory for disparity images const int32_t dims[3] = {width,height,width}; // bytes per line = width float* D1_data = (float*)malloc(width*height*sizeof(float)); float* D2_data = (float*)malloc(width*height*sizeof(float)); // process Elas::parameters param; param.postprocess_only_left = false; Elas elas(param); elas.process(I1->data,I2->data,D1_data,D2_data,dims); // find maximum disparity for scaling output disparity images to [0..255] float disp_max = 0; for (int32_t i=0; i *D1 = new image (width,height); image *D2 = new image (width,height); for (int32_t i=0; i (0), disp_right.ptr (0), dim); clock_t end = clock(); cout << "running time: " << (double)(1000 * (end - start) / CLOCKS_PER_SEC) << endl; disp_left = disp_left * 3; string name = argv1.substr(argv1.find_last_of('/')+1, argv1.length()); name = name.substr(0, name.find_last_of('.')) + "_disp"; cout << "../img/" + name + ".png" << endl; cv::imwrite("../img/" + name + ".png", disp_left); cout << "... done!" << endl; } // display help } else { cout << endl; cout << "ELAS demo program usage: " << endl; cout << "./elas demo ................ process all test images (image dir)" << endl; cout << "./elas left.pgm right.pgm .. process a single stereo pair" << endl; cout << "./elas -h .................. shows this help" << endl; cout << endl; cout << "Note: All images must be pgm greylevel images. All output" << endl; cout << " disparities will be scaled such that disp_max = 255." << endl; cout << endl; } return 0; } - 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
打开终端
cd ~/Documents/projects/libelas/ mkdir build cd /build cmake .. make- 1
- 2
- 3
- 4
- 5
编译通过后
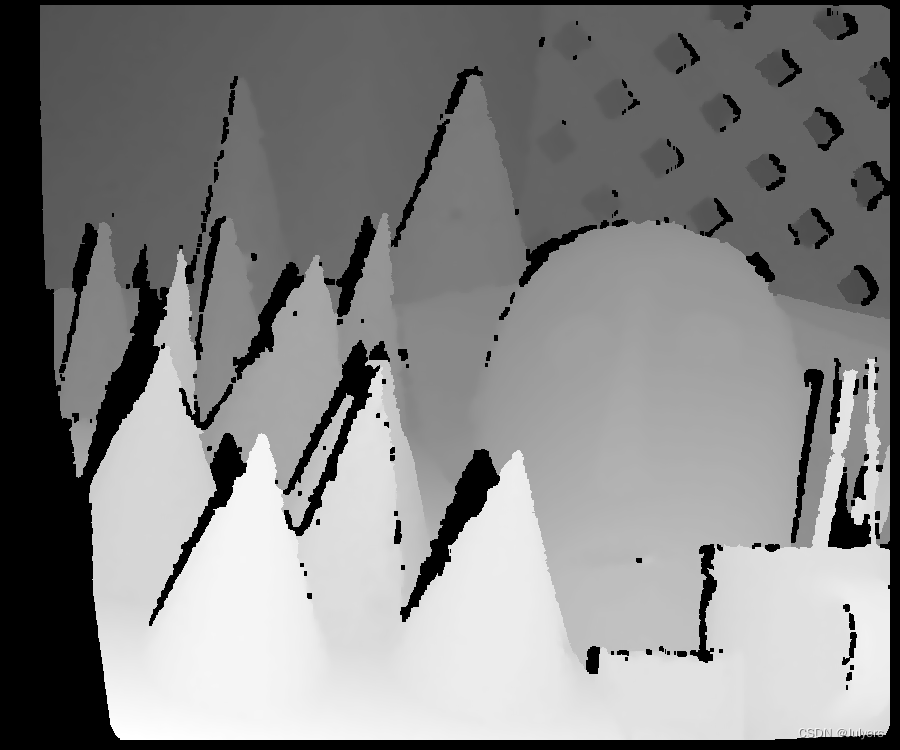
# 输入pgm格式图片得到的视差图 ./elas ../img/cones_left.pgm ../img/cones_right.pgm- 1
- 2
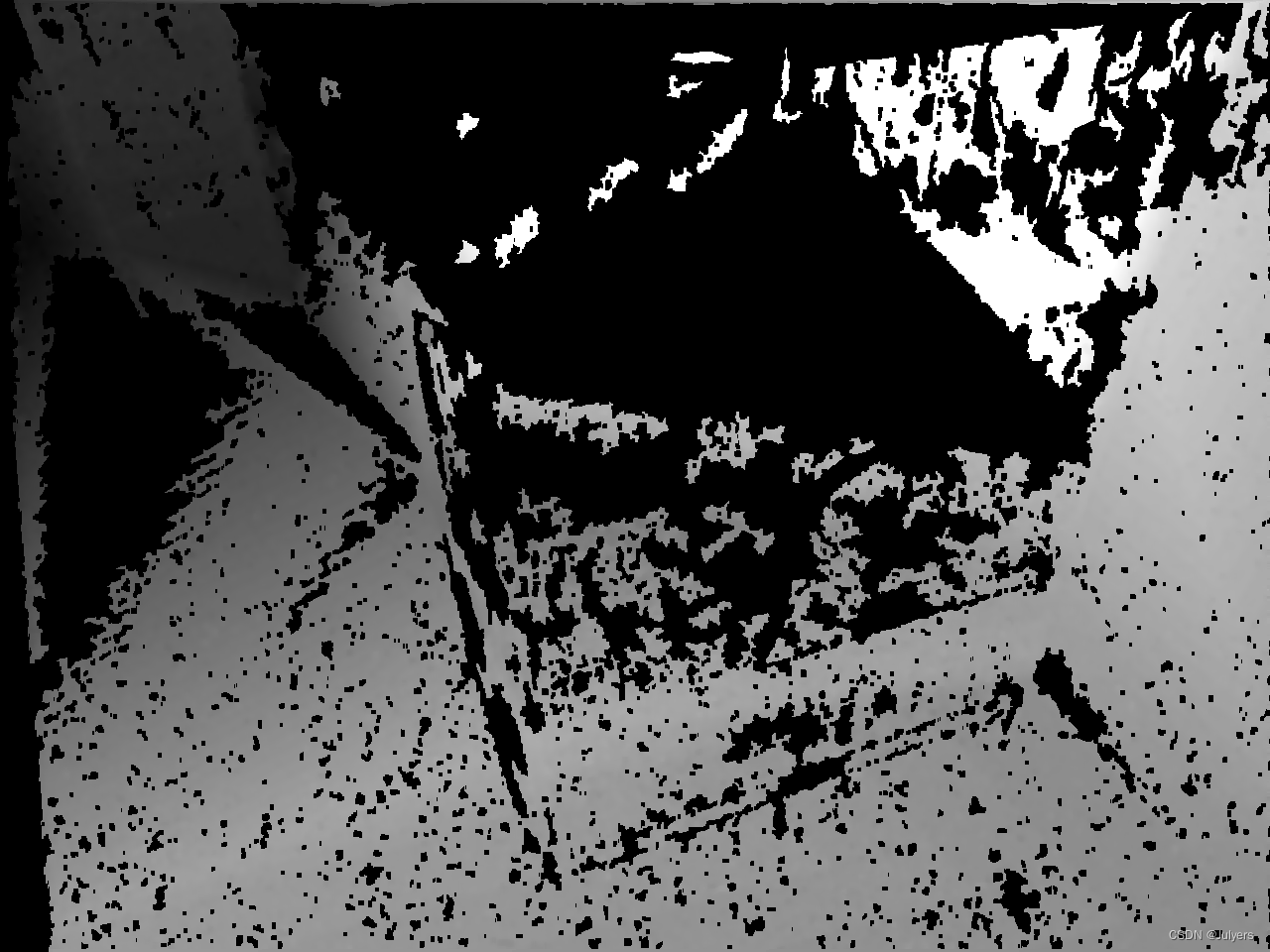
# 输入png格式图片得到的视差图 ./elas ~/Documents/data/MyEuRoC/cam0/data/1694603839467.png ~/Documents/data/MyEuRoC/cam1/data/1694603839467.png- 1
- 2
参考:
[1] 双目立体匹配算法:ELAS
[2] VS2019下cmake项目:利用ELAS方法计算双目视差
-
相关阅读:
CopyOnWriteArrayList源码分析
面试面经|Java面试Hibernate面试题
CNN(卷积网络)如何处理Size(Shape)大小可变的输入图像数据
Vue中使用组件的三大步骤
下一代TCP: 网络演进的平台
Compress Objects, Not Cache Lines: An Object-Based Compressed Memory Hierarchy
ECCV 2022 Oral | 自监督学习与量化协同互助
数字孪生北京故宫,元宇宙推进旅游业进程
VBA数据库解决方案第九讲:把数据库的内容在工作表中显示
学成在线第二天-查询课程、查询课程分类、新增课程接口实现以及跨域的处理思路和全局异常处理的使用以及面试题
- 原文地址:https://blog.csdn.net/weixin_41631106/article/details/132882417
