-
计算机视觉实战项目(图像分类+目标检测+目标跟踪+姿态识别+车道线识别+车牌识别)
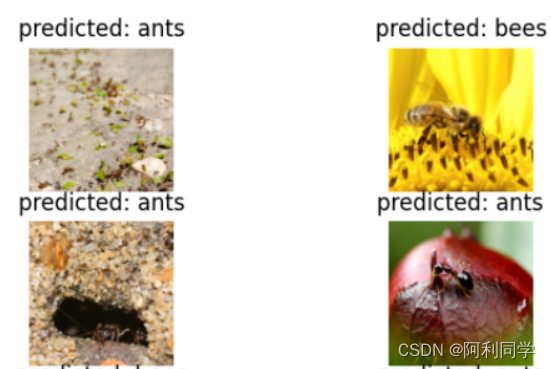
图像分类
教程博客_传送门链接:链接
在本教程中,您将学习如何使用迁移学习训练卷积神经网络以进行图像分类。您可以在 cs231n 上阅读有关迁移学习的更多信息。
本文主要目的是教会你如何自己搭建分类模型,耐心看完,相信会有很大收获。废话不多说,直切主题…
首先们要知道深度学习大都包含了下面几个方面:
1.加载(处理)数据
2.网络搭建
3.损失函数(模型优化)
4 模型训练和保存
把握好这些主要内容和流程,基本上对分类模型就大致有了个概念。
目标检测
交通标志识别
本项目是一个基于 OpenCV 的交通标志检测和分类系统,可以在视频中实时检测和分类交通标志。检测阶段使用图像处理技术,在每个视频帧上创建轮廓并找出其中的所有椭圆或圆形。它们被标记为交通标志的候选项。
教程博客_传送门链接------->交通标志识别

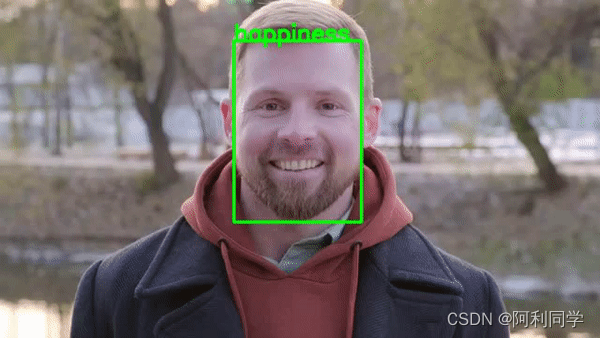
表情识别、人脸识别
面部情绪识别(FER)是指根据面部表情识别和分类人类情绪的过程。通过分析面部特征和模式,机器可以对一个人的情绪状态作出有根据的推断。这个面部识别的子领域高度跨学科,涉及计算机视觉、机器学习和心理学等领域的知识。
教程博客_传送门链接------->表情识别
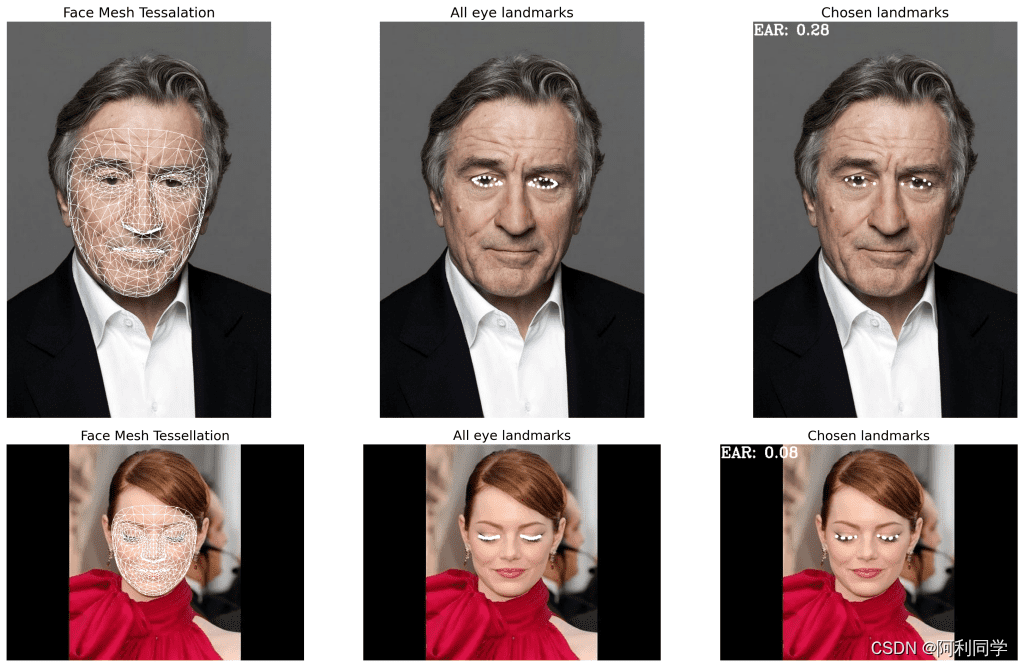
疲劳检测
瞌睡经常发生在汽车行驶的过程中,该行为害人害己,如果有一套能识别瞌睡的系统,那么无疑该系统意义重大!
教程博客_传送门链接------->疲劳检测
车辆跟踪及测距
该项目一个基于深度学习和目标跟踪算法的项目,主要用于实现视频中的目标检测和跟踪。该项目使用了 YOLOv4 目标检测算法和 DeepSORT 目标跟踪算法,以及一些辅助工具和库,可以帮助用户快速地在本地或者云端上实现视频目标检测和跟踪!
教程博客_传送门链接------->单目测距和跟踪

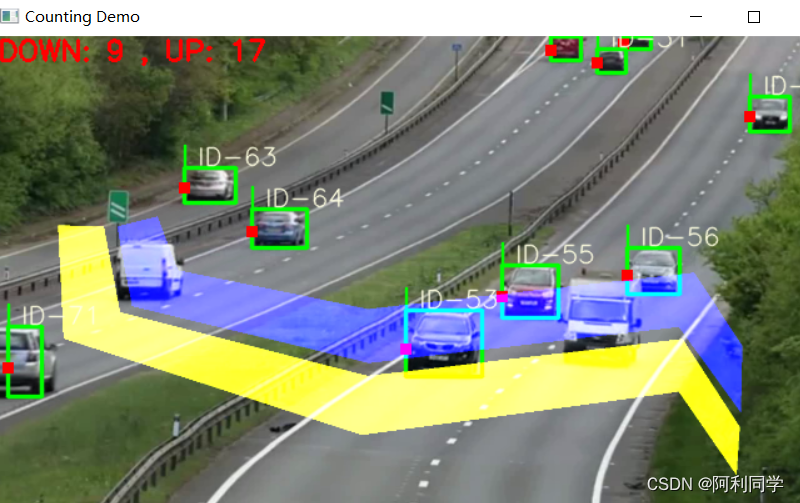
yolov5 deepsort 行人/车辆(检测 +计数+跟踪+测距+测速)
- 实现了局域的出/入 分别计数。
- 显示检测类别,ID数量。
- 默认是 南/北 方向检测,若要检测不同位置和方向,需要加以修改
- 可在 count_car/traffic.py 点击运行
- 默认检测类别:行人、自行车、小汽车、摩托车、公交车、卡车、船。
- 检测类别可在 objdetector.py 文件修改。
原文链接:https://blog.csdn.net/ALiLiLiYa/article/details/131819630
目标跟踪
教程博客_传送门链接------->目标跟踪
YOLOv5是一种流行的目标检测算法,它是YOLO系列算法的最新版本。YOLOv5采用了一种新的架构,可以在保持高准确性的同时提高检测速度。在本文中,我们将介绍如何使用YOLOv5_deepsort算法来进行船舶跟踪和测距。

车道线识别
本文主要讲述项目集成:从车道线识别、测距、到追踪,集各种流行模型于一体!
不讲原理,直接上干货!
把下文环境配置学会,受益终生!
各大项目皆适用!
教程博客_传送门链接------->车道线识别+目标检测
看下本项目的效果:

语义分割
MMsegmentation是一个基于PyTorch的图像分割工具库,它提供了多种分割算法的实现,包括语义分割、实例分割、轮廓分割等。MMsegmentation的目标是提供一个易于使用、高效、灵活且可扩展的平台,以便开发者可以轻松地使用最先进的分割算法进行研究和开发。
教程博客_传送门链接------->语义分割

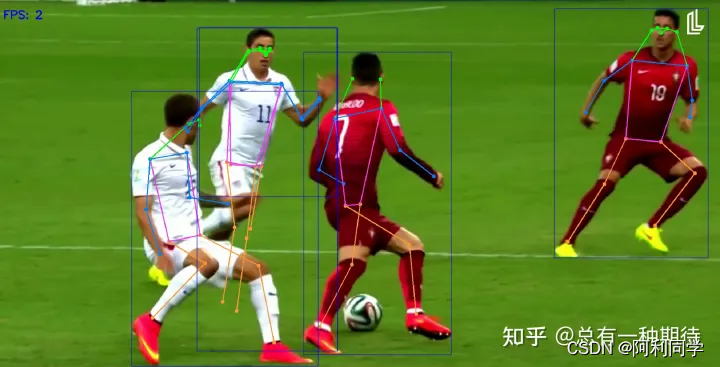
姿态识别
人体姿态估计是计算机视觉中的一项重要任务,具有各种应用,例如动作识别、人机交互和监控。近年来,基于深度学习的方法在人体姿态估计方面取得了显著的性能。其中最流行的深度学习方法之一是YOLOv7姿态估计模型。
程博客_传送门链接------->:https://blog.csdn.net/ALiLiLiYa/article/details/129482358
-
相关阅读:
swing中的并发
【吴恩达机器学习笔记】三、矩阵
ElasticSearch - 基础概念,以及和 mysql 的对比
公会发展计划(GAP):经过实战考验的 Web3 任务模式
vs2019 未能正确加载settingspackage
有六家机器视觉公司今年11月份初放假到明年春节后,除夕不放假看住企业不跑路,不倒闭,明年大家日子会越来越甜
语言基础篇12——Python有哪些异常,优雅的处理异常
Python机器视觉--OpenCV进阶(核心)--图像直方图与掩膜直方图与直方图均衡化
IDEA 搭建 SpringCloud 项目【超详细步骤】
基于Java的在线问卷调查系统的设计与实现(源码+lw+部署文档+讲解等)
- 原文地址:https://blog.csdn.net/ALiLiLiYa/article/details/132842135