-
无人机航线规划
GitHub - zhm-real/PathPlanning: Common used path planning algorithms with animations.
路径规划算法(Python&Matlab) - 知乎 (zhihu.com)
无人机航线规划,对于无人机的任务执行有着至关重要的作用,无人机在从起点飞向目的点的过程中,如何规划出一条安全路径,并且保证该路径代价最优,是无人机航线规划的主要目的。其中路径最优的含义是,在无人机最小转弯半径、无人机最小俯仰角变化、无人机续航时间等约束条件下,规划出一条航线和飞行时间最短的路径。
一、传统航线规划算法

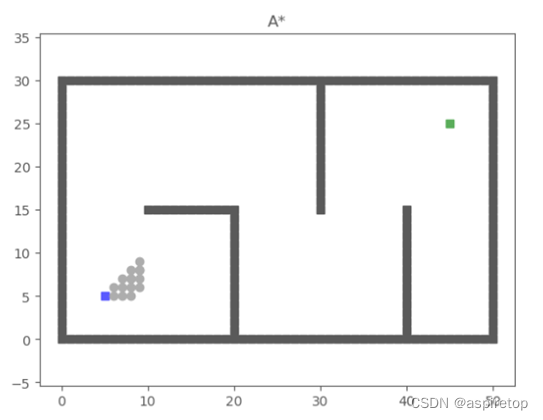
1.A*算法
首先对地图进行栅格建模,然后使用f=g+h计算每个栅格的距离代价,最后寻找全局最优的一条路径。优点是全局最优,缺点是面积大的情况下,速度很慢。
2.人工势场法
人工势场法,设置固定迭代次数,每迭代一次,计算该位置的引力与斥力的合力,然后根据合力计算下一步的位置,知道到达终点。优点是简单易用,缺点是容易陷入局部最优,例如障碍物如果靠近终点,则不易规划出可用航线。

3.蚁群算法
4.粒子群算法
5.遗传算法
6.RRT算法
二、优缺点对比
三、总结
-
相关阅读:
每个前端应该掌握的7个代码优化的小技巧
简记C语言清空输入残留内容
服务器常用端口号总结
Redis(五) - Redis企业实战之短信登录
哈夫曼编码原理及实现
双十一攒幸运值领红包,2022年天猫双11预售活动解读
【工厂模式】简单工厂模式-简单例子
falco 【3】 default macro
神经网络需要哪些数学知识,神经网络的数学方法
vue3插件开发,上传npm
- 原文地址:https://blog.csdn.net/ljjjjjjjjjjj/article/details/132797173