-
【继RNN之后的一项技术】Transfomer 学习笔记
谷歌团队在17年的神作,论文17年6月发布 https://arxiv.org/abs/1706.03762 被NIPS2017收录,目前引用量已经逼近3w。
以下内容参考李沐老师的课程《动⼿学深度学习(Pytorch版)》简介
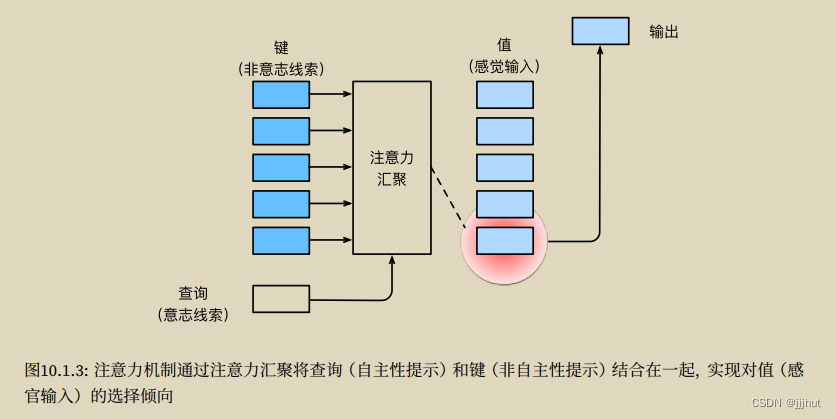
- 注意力
- 自主性:有目的的搜索某样东西(键)
- 非自住性:无目的的关注某样东西(值)
两种注意力机制的关系如下图所示:
多头注意力
模型
数学表示:
给定查询 q ∈ R d q q ∈ R^{d_q} q∈Rdq、 键 k ∈ R d k 键k∈ R^{d_k} 键k∈Rdk和值 v ∈ R d v v∈R^{d_v} v∈Rdv,每个注意⼒头hi(i = 1; : : : ; h)的计算⽅法为:

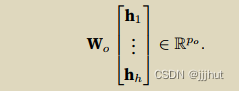
多头注意⼒的输出需要经过另⼀个线性转换,它对应着h个头连结后的结果,可学习的参数为 W o W_o Wo
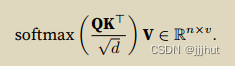
缩放点积注意力
使⽤点积可以得到计算效率更⾼的评分函数,但是点积操作要求查询和键具有相同的⻓度d。假设查询和键
的所有元素都是独⽴的随机变量,并且都满⾜零均值和单位⽅差,那么两个向量的点积的均值为0,⽅差为d。
为确保⽆论向量⻓度如何,点积的⽅差在不考虑向量⻓度的情况下仍然是1,我们再将点积除以pd,则缩放
点积注意⼒(scaled dot-product attention)评分函数为:
 在实践中,我们通常从⼩批量的⻆度来考虑提⾼效率,
在实践中,我们通常从⼩批量的⻆度来考虑提⾼效率,
自注意力
特点:查询、键和值来⾃同⼀组输⼊。
给定⼀个由词元组成的输⼊序列x1,…,xn,其中任意xi ∈Rd(1 ≤ i ≤ n)。该序列的⾃注意⼒输出为⼀个⻓
度相同的序列 y1,…,yn,其中:

Compare CNN, RNN,Self-Attention
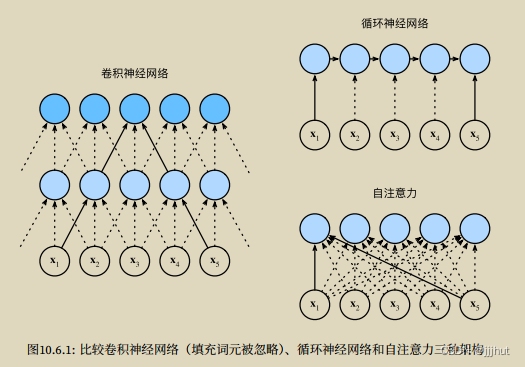
卷积神经⽹络和⾃注意⼒都拥有并⾏计算的优势,⽽且⾃注意⼒的最⼤路径⻓度最短。但是因为
其计算复杂度是关于序列⻓度的⼆次⽅,所以在很⻓的序列中计算会⾮常慢。位置编码
在处理词元序列时,循环神经⽹络是逐个的重复地处理词元的,⽽⾃注意⼒则因为并⾏计算⽽放弃了顺序操
作。为了使⽤序列的顺序信息,通过在输⼊表⽰中添加 位置编码(positional encoding)来注⼊绝对的或相
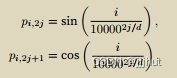
对的位置信息。位置编码可以通过学习得到也可以直接固定得到。- 基于正弦和余弦的位置编码:假设输⼊表示
X
∈
R
n
×
d
X∈R^{n×d}
X∈Rn×d 包含⼀个序列中n个词元的d维嵌⼊表⽰。位置编码使⽤相同形状的位置嵌⼊矩阵
P
∈
R
n
×
d
P∈R^{n×d}
P∈Rn×d输出X + P,矩阵第i⾏、第2j列和2j + 1列上的元素为:
Transformer 结构
Transformer属于编码器-解码器架构的一种.
Transformer的编码器和解码器是基于⾃注意⼒的模块叠加⽽成的,源(输⼊)序列和⽬标(输出)序列的嵌⼊(embedding)表⽰将加上位置编码(positional encoding),再分别输⼊到编码器和解码器中。
Transformer 结构如下图所示:
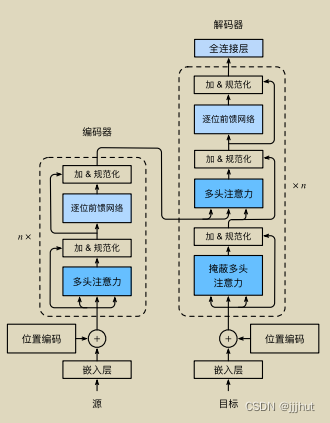
Transformer架构如上图所示,是一个seq2seq model,左半边是encoder,右半边是decoder。Transformer的编码器和解码器都堆叠了6层,n=6 。encoder的输入是一个sequence,经过Multi-Head Attention之后得到另一个sequence,Add&Norm包括一个残差连接和Layer Normalization
decoder的输入是前一个time step的output,Masked Multi-Head Attention是指attention只能作用在已经产生的输出上,第二个Multi-Head Attention会attention到encoder的输出。Transformer 训练阶段
在训练阶段,首先需要获取数据及其标签,例如一定声音讯号,对应的标签是“机器学习”,声音讯号作为encoder的输入,而decoder在训练阶 段的输入是正确标签,即“机器学习”(因此需要masked multi-head attention),我们希望decoder的输出尽可能接近真实标签,最小化交叉熵
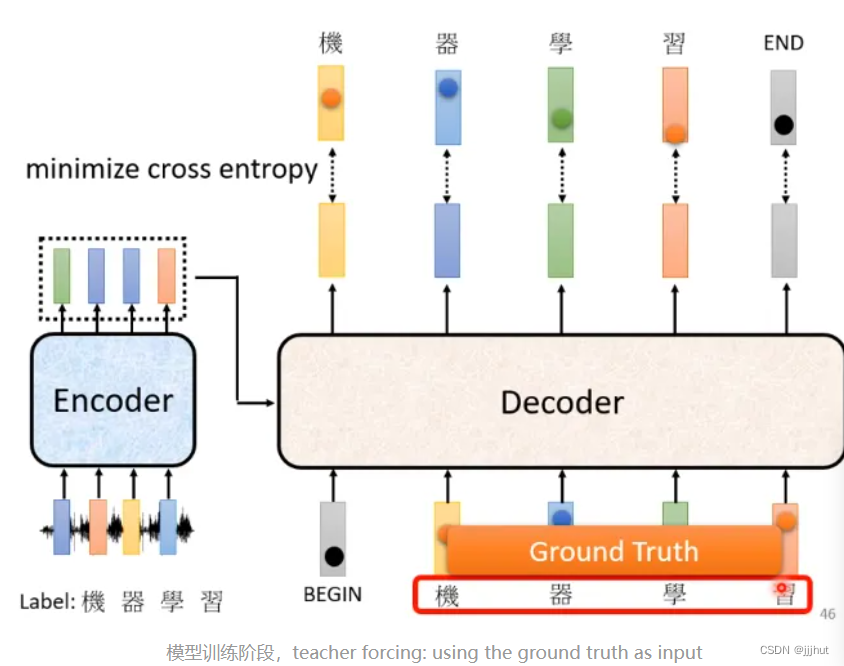
在预测阶段,decoder看不到真实标签,看到的是自己的输入,因此这里有一个mismatch,叫做exposure bias,一个解决方案是在训练阶段给decoder一些错误的输入,增加模型的鲁棒性,这种方法叫做scheduled sampling - 注意力
-
相关阅读:
22-07-27 西安 ElasticSearch(02)
时间序列压缩算法及其应用
Python字典的用法总结
@staticmethod
微信小程序框架---详细教程
使用kubasz快速搭建Kubernetes集群
git命令的操作
Web开发:Web开发中的域概念整理与解读
终于拿到了2022阿里技术专家分享的552页大型网站架构实战PDF文档
相机选型介绍
- 原文地址:https://blog.csdn.net/jjjhut/article/details/132719122