-
华为OD机试-机器人走迷宫
题目描述
机器人走一个迷宫,给出迷宫的x和y(x*y的迷宫)并且迷宫中有障碍物,输入k表示障碍物有k个,并且会将障碍物的坐标挨个输入.
机器人从0,0的位置走到x,y的位置并且只能向x,y增加的方向走,不能回退.
如代码类注释展示的样子,#表示可以走的方格,0代表障碍,机器人从0,0的位置只能向下或者向前走到出口.
其中会有不可达方格和陷阱方格.不可达方格为第四行前三个,该机器人在行走路径上不可能走到的方格,陷阱方格如第一行最后两个,走进之后则不能抵达终点.
要求: 输出陷阱和不可达方格方格数量1.房间有 X*Y 的方格组成,例如下图为 6*4 的大小。每一个放个以坐标 (x,y) 描述
2.机器人固定从方格(,) 出发,只能向东或者向北前进出口固定为房间的最东北角,如下图的方格(5,3)。用例保证机器人可以从入口走到出口。
3.房间有些方格是墙壁,如 (4,1)机器人不能经过那儿。
4.有些地方是一旦到达就无法走到出口的,如标记为 B 的方格,称之为陷阱方格
5.有些地方是机器人无法达到的,如标记为 A 的方格,称之为不可达方格,不可达方格不包括墙壁所在的位置6.如下实例图中,陷阱方格有 2 个,不可达方格有 3 个。
7.请为该机器人实现 路径规划Q功能: 给定房间大小,墙壁位置,请计算出陷阱方格与不可达方格分别有多少个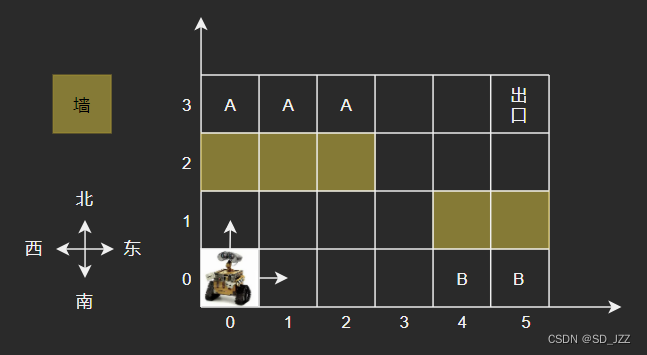
代码实现
- # coding:utf-8
- """
- @Date :2023/7/22
- @Title :机器人走迷宫
- @discript:https://dream.blog.csdn.net/article/details/128986089
- """
- def robotWalkMaze(x, y, obs):
- dp = [['#'] * y for _ in range(x)]
- # 把墙壁坐标对应的结果标记为0
- for ob in obs:
- i, j = ob
- dp[i][j] = 0
- def dfs(x_, y_):
- if x_ == x - 1 and y_ == y - 1: # 如果坐标等于出口位置,返回路线可用,标记1
- dp[x_][y_] = 1
- return 1
- elif x_ >= x or y_ >= y or dp[x_][y_] == 0: # 如果坐标大于等于边界,或者dp中标记为0,即墙壁,这路线标记为-1,不可用
- return -1
- elif dp[x_][y_] != '#': # 如果当前位置不等于#,即已经被标记过,返回该标记即可
- return dp[x_][y_]
- else: # 按照深度优先算法先向下走,再向右走
- down = dfs(x_ + 1, y_)
- right = dfs(x_, y_ + 1)
- if down == -1 and right == -1: # 如果当前位置标记为向下和向右都标记为-1,即说明该位置是陷阱方块
- dp[x_][y_] = -1
- else:
- dp[x_][y_] = max(down, right) # 位置信息取向下或者向右最大值,其实就是只要有1就ok
- return dp[x_][y_]
- dfs(0, 0)
- r1 = sum(line.count(-1) for line in dp)
- r2 = sum(line.count('#') for line in dp) # 位置标记没被更新,说明是不可达的方块
- return r1, r2
- x, y = map(int, input('X,Y:').split())
- obss = []
- for _ in range(int(input('N:'))):
- obj = tuple(map(int, input('location:').split(' ')))
- obss.append(obj)
- c1, c2 = robotWalkMaze(x, y, obss)
- print(c1, c2)
-
相关阅读:
xlwings模块(数据保存为xlsx文件)
Shell脚本中2>&1、>、>>等符号到底是什么含义
【从零开始学习 SystemVerilog】2.4、SystemVerilog 数据类型—— Enumeration(枚举)
脱口秀与ST洲际的“玩笑”故事,掀开了市场隐秘的角落
idea默认带的equals和hashcode引起的bug
训练营第三十三天贪心(第五部分重叠区间问题)
np.concatenate
MySQL开发技巧——索引
4.1EF Core
springboot整合aop,实现日志操作
- 原文地址:https://blog.csdn.net/SD_JZZ/article/details/132666722
