-
VPG算法
VPG算法
前言
首先来看经典的策略梯度REINFORCE算法:
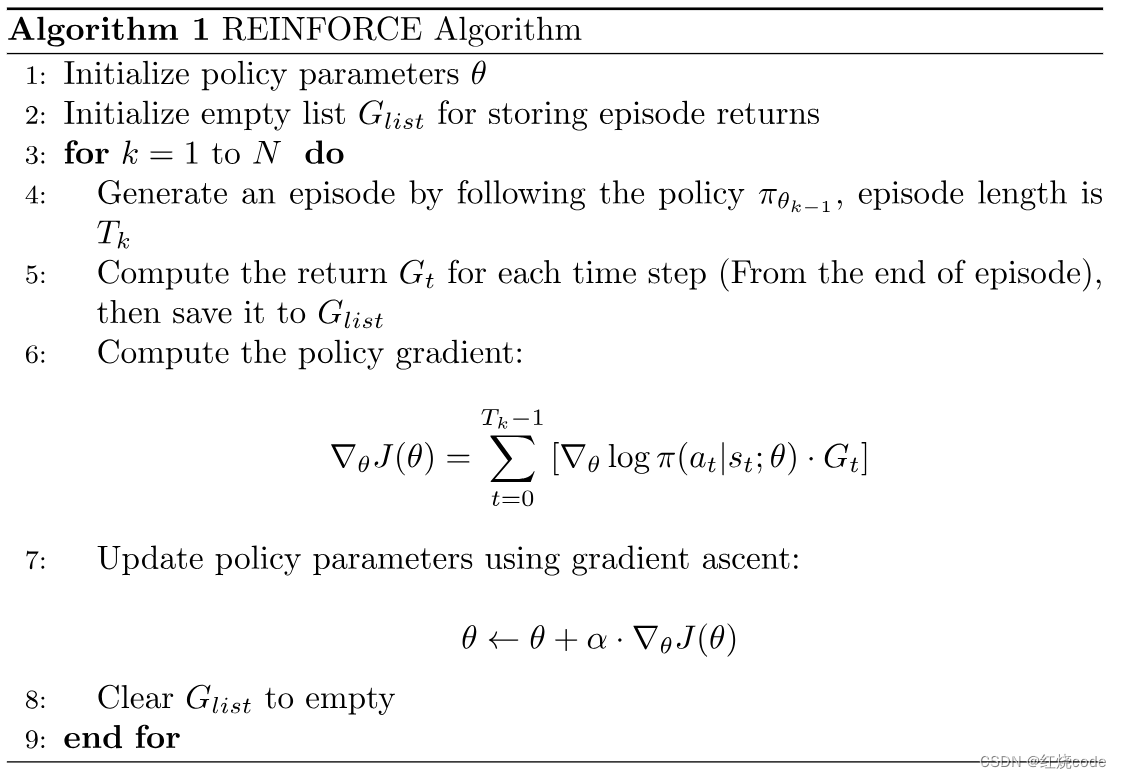
在REINFORCE中,每次采集一个episode的轨迹,计算每一步动作的回报 G t G_t Gt,与动作概率对数相乘,作为误差反向传播,有以下几个特点:
- 每个时间步更新一次参数
- 只有策略网络,没有价值网络
- 计算 G G G时,仅仅采样了一条轨迹
- 一般来说,计算 G G G时,从最后的时间步开始往前计算,这是为了节省计算量
- G G G实际上类似于 Q Q Q函数,因为 Q Q Q函数就是动作价值回报的期望
VPG算法
全称:Vanilla Policy Gradient,但是属于Actor-Critic算法,因为它既有策略网络,又有价值网络
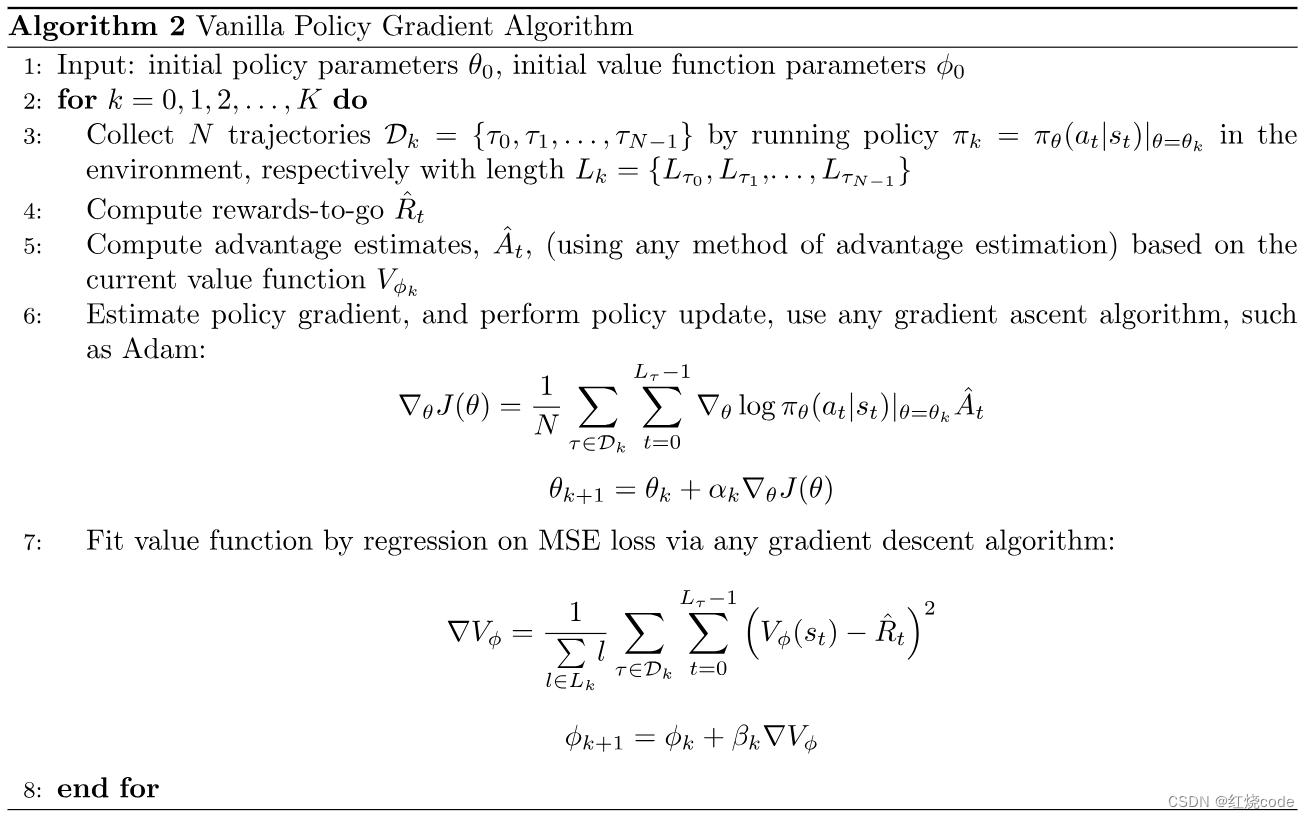
- 每个episode更新一次参数
- 上述伪代码中,计算 G G G时,采样了多个轨迹
- 一般来说,计算 G G G时,从最后的时间步开始往前计算,这是为了节省计算量
- Reward-to-go:即折扣因子 γ = 1 \gamma=1 γ=1, G t = R ^ t = r t + r t + 1 + … + r T G_t=\hat{R}_t=r_t+r_{t+1}+\ldots+r_T Gt=R^t=rt+rt+1+…+rT, T T T为episode的长度
- 通常为 A ^ t \hat{A}_t A^t引入baseline,以减小方差,提升训练稳定性
A ^ t = R ^ t − V ϕ k \hat{A}_t=\hat{R}_t-V_{\phi_k} A^t=R^t−Vϕk
比较
/ REINFORCE VPG 价值网络 无 有 参数更新 每个时间步 每个episode 回报 有折扣 无折扣 采样轨迹 一条 多条 baseline 无 有 -
相关阅读:
记录一次异常访问场景
三元组(C++ 实现矩阵快速转置)
一个神奇的整型常量
3年测试在职,月薪还不足2w,最近被裁员,用亲身经历给大家提个醒...
20个.NET/.NET Core 优秀项目框架
如何解决虚拟仿真教学中的设备限制和卡顿问题?|点量云流技术解决方案
SQL常用基础语句(二)-- FGHIJ开头
chatgpt赋能python:Python随机选择数字
network-tc-ebpf
(无人驾驶仿真软件整理)
- 原文地址:https://blog.csdn.net/qq_51352578/article/details/132653829