-
手撕 视觉slam14讲 ch7 / pose_estimation_3d2d.cpp (1)
首先理清我们需要实现什么功能,怎么实现,提供一份整体逻辑:包括主函数和功能函数
主函数逻辑:
1. 读图,两张rgb(cv::imread)
2. 找到两张rgb图中的特征点匹配对
2.1定义所需要的参数:keypoints1, keypoints2,matches
2.2 提取每张图像的检测 Oriented FAST 角点位置并匹配筛选(调用功能函数1)
3. 建立3d点(像素坐标到相机坐标)
3.1读出深度图(cv::imread)
3.2取得每个匹配点对的深度
3.2.1 得到第y行,第x个像素的深度值
(ushort d = d1.ptr
(row)[column]) 3.2.2 去除没有深度的点
3.2.3 转到相机坐标系(调用功能函数2)
4. 调用epnp求解(input:3d点,2d点对,内参,是否去畸变,求解方式)
4.1求解(cv::solvePnP)
4.2 求解结果为向量,需要转成矩阵(cv::Rodrigues)
- int main( int agrc, char** agrv) {
- // 1. 读图(两张rgb)
- Mat image1 = imread(agrv[1] , CV_LOAD_IMAGE_COLOR );
- Mat image2 = imread(agrv[2] , CV_LOAD_IMAGE_COLOR );
- assert(image1.data && image2.data && "Can not load images!");
- // 2. 找到两张rgb图中的特征点匹配对
- // 2.1定义keypoints1, keypoints2,matches
- std::vector
keypoints1,keypoints2; - std::vector
matches; - // 2.2 提取每张图像的检测 Oriented FAST 角点位置并匹配筛选
- Featurematcher(image1,image2, keypoints1,keypoints2,matches);
- // 3. 建立3d点(像素坐标到相机坐标)
- Mat K = (Mat_<double>(3, 3) << 520.9, 0, 325.1, 0, 521.0, 249.7, 0, 0, 1);//内参
- vector
pts_3d; - vector
pts_2d; - //3.1读出深度图
- Mat d1 =imread(agrv[3],CV_LOAD_IMAGE_UNCHANGED);
- //3.2取得每个匹配点对的深度(ushort d = d1.ptr
(row)[column];就是指向d1的第row行的第column个数据。数据类型为无符号的短整型 ) - for (DMatch m: matches)
- {
- //3.2.1 得到第y行,第x个位置的像素的深度值
- ushort d = d1.ptr<unsigned short>(int (keypoints1[m.queryIdx].pt.y)) [int(keypoints1[m.queryIdx].pt.x)];
- // 3.2.2 去除没有深度的点
- if(d==0){
- continue;
- }
- float dd=d/5000.0 ;
- //3.2.3 转到相机坐标系
- Point2d p1 = pixtocam(keypoints1[m.queryIdx].pt , K);
- pts_3d.push_back(Point3f(p1.x*dd,p1.y*dd,dd));
- pts_2d.push_back(keypoints2[m.trainIdx].pt);
- }
- cout << "3d-2d pairs: " << pts_3d.size() << endl;
- // 4. 调用epnp求解(input:3d点,2d点对,内参,false,求解方式)
- // solvePnP( InputArray objectPoints, InputArray imagePoints, InputArray cameraMatrix, InputArray distCoeffs, OutputArray rvec, OutputArray tvec, bool useExtrinsicGuess = false, int flags = SOLVEPNP_ITERATIVE );
- Mat r,t;
- // 4.1求解
- solvePnP(pts_3d,pts_2d,K,Mat(), r,t,false,SOLVEPNP_EPNP);
- // 4.2 求解结果为向量,需要转成矩阵
- Mat R;
- cv::Rodrigues(r,R);
- cout<<"R="<cout<<"T="<// 5.可视化匹配Mat img_goodmatch;drawMatches(image1, keypoints1, image2, keypoints2, matches, img_goodmatch);imshow("good matches", img_goodmatch);waitKey(0);return 0;}
功能函数1: Featurematcher
实现过程在前几篇中已经详细说明:视觉slam14讲 逐行解析代码 ch7 / orb_cv.cpp
2.2.1初始化存储特征点数据的变量
2.2.2 提取每张图像的检测 Oriented FAST 角点位置
2.2.3 计算图像角点的BRIEF描述子
2.2.4 根据刚刚计算好的BRIEF描述子,对两张图的角点进行匹配
2.2.5 匹配点对筛选计算最小距离和最大距离
2.2.6 当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限.
- void Featurematcher( const Mat &image1, const Mat &image2, std::vector
&keypoints1, std::vector {&keypoints2, std::vector &matches) - // 2.2.1初始化存储特征点数据的变量
- Mat descr1, descr2;
- Ptr
detector = ORB::create(); - Ptr
descriptor = ORB::create(); - Ptr
matcher = DescriptorMatcher::create("BruteForce-Hamming"); - // 2.2.2 提取每张图像的检测 Oriented FAST 角点位置
- detector->detect(image1, keypoints1);
- detector->detect(image2, keypoints2);
- // 2.2.3 计算图像角点的BRIEF描述子
- descriptor->compute(image1, keypoints1, descr1);
- descriptor->compute(image2, keypoints2, descr2);
- // 2.2.4 根据刚刚计算好的BRIEF描述子,对两张图的角点进行匹配
- std::vector
match; - matcher->match(descr1, descr2, match);
- Mat img_match;
- drawMatches(image1, keypoints1, image2, keypoints2, match, img_match);
- imshow("all matches", img_match);
- waitKey(0);
- // 2.2.5 匹配点对筛选计算最小距离和最大距离
- double min_dis = 10000, max_dis = 0;
- // 2.2.5.1找出所有匹配之间的最小距离和最大距离, 即是最相似的和最不相似的两组点之间的距离
- for (int i = 0; i < descr1.rows; i++)
- {
- double dist = match[i].distance;
- if (dist < min_dis)
- min_dis = dist;
- if (dist > max_dis)
- max_dis = dist;
- }
- cout<<"max_dis="<cout<<"min_dis="<//2.2.6 当描述子之间的距离大于两倍的最小距离时,即认为匹配有误.但有时候最小距离会非常小,设置一个经验值30作为下限.for (int i = 0; i < descr1.rows; i++){if (match[i].distance<= max(2*min_dis,30.0)){matches.push_back(match[i]);}}cout<<"matches.size="<}
功能函数2:
将输入的像素坐标(x ,y)转化到归一化相机坐标系下得到(X,Y)
我们知道:相机的投影模型为:
 , 即
, 即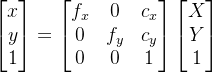
所以
 ,
, 
- Point2d pixtocam(const Point2d &p , const Mat &K){
- return Point2d(
- // X=(u-cx)/fx
- (p.x - K.at<double>(0,2)) / K.at<double>(0,0) ,
- // Y=(v-cy)/fy
- (p.y-K.at<double>(1,2)) / K.at<double>(1,1)
- );
- }
最后匹配效果及位姿结果:
allmatch:

goodmatch:

位姿输出:R,T:

下一篇介绍 如何用非线性优化g2o的BA来求解位姿:(2)
- 相关阅读:
【数学建模】离散模型(循环比赛的名次)
小国王(目标状态优化版)—— 状态压缩DP
云服务器ECS价格表出炉_2024年最新价格表——阿里云
java计算机毕业设计高校宿舍管理系统MyBatis+系统+LW文档+源码+调试部署
基于改进莱维飞行和混沌映射的粒子群优化BP神经网络分类研究(Matlab代码实现)
前端 获取API的响应时间 的方法总结
API测试基础之http协议
C语言之婚礼上的谎言
在Mac中使用 brew services start redis 命令启动、停止Redis服务报错
从一个表格render方法问题看React函数组件的更新
- 原文地址:https://blog.csdn.net/weixin_62952541/article/details/132603926
