-
ArduPilot开源代码之H743+BMI270x2+ChibiOS配置适配
1. 源由
Betaflight转ArduPilot飞行,体验更好的GCS控制体验。
目前,模型的配置情况:
- Mark4
- H743 BMI270 x 2
- EFM8 Bluejay
- Motor 2205 2450RPM x 4
- GPS BN880
- CRSF Receiver
- mavlink esp32
- FOXEER Toothless 2
- PandaRC VT5804M L1 (Buzzer/Mic/IRC Protocol) 5.8G
飞控硬件实际情况:
- 控制器:STM32H743VI H6
- 陀螺仪:BMI270
- 气压计:DPS310
- 黑匣子:128MB
- PWM输出:10CH
- 舵机输出:2CH
- 通用串口:8CH
- 输入电源:3-6SLipo
- 输出电源:5V/2.5A, 9V/3A
- 重量:8.8g
- 外形尺寸:37mm x 37mm
- 安装孔位:30.5mm x 30.5mm
2. 配置适配
根据Matek H743和原厂AOCODARC配置文件,通过对ArduPilot硬件配置文件的学习和22轮实践,调试/验证,H743-BMI270x2-v22.zip,与文中保持一致,但存在问题。如要使用请下载H743-BMI270x2-v24.zip。
注:上述v24版本:1)修复了gyro方向问题(虽然基本悬停,左右,前后都正常,不建议使用v22版本);2)修复了Buzz配置导致无法使用VTX的问题。
将每行的内容,尽量结合配置文件给出描述,详细开发文档详见:Porting to a new flight controller board
2.1 bootloader配置
# hw definition file for processing by chibios_pins.py # # MCU class and specific type MCU STM32H7xx STM32H743xx # board ID for firmware load APJ_BOARD_ID 1018 # crystal frequency, setup to use external oscillator OSCILLATOR_HZ 8000000 FLASH_SIZE_KB 2048 # bootloader starts at zero offset FLASH_RESERVE_START_KB 0 # use last 2 pages for flash storage # H743 has 16 pages of 128k each STORAGE_FLASH_PAGE 14 # the location where the bootloader will put the firmware # the H743 has 128k sectors FLASH_BOOTLOADER_LOAD_KB 128 # order of UARTs (and USB). Allow bootloading on USB and telem1 SERIAL_ORDER OTG1 #UART7 # UART7 (telem1) #PE7 UART7_RX UART7 NODMA #PE8 UART7_TX UART7 NODMA # PA10 IO-debug-console PA11 OTG_FS_DM OTG1 PA12 OTG_FS_DP OTG1 PA13 JTMS-SWDIO SWD PA14 JTCK-SWCLK SWD PE3 LED_BOOTLOADER OUTPUT LOW define HAL_LED_ON 0 # Add CS pins to ensure they are high in bootloader PC15 IMU1_CS CS PB12 MAX7456_CS CS PE11 IMU2_CS CS PD3 FLASH_CS CS- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
2.2 flight controller配置
# hw definition file for processing by chibios_pins.py # for AOCODARC H743 Dual, and it's for Daniel's copter: # Version 22: BMI270 + DPS310 + X8(4 motor with bddshot used) # This hwdef.dat file contains a lot of comments so it can act as a # reference for developers adding new boards. # The hwdef.dat file defines all the hardware peripherals and pins for # a port of ArduPilot to a board using the ChibiOS HAL. You should be # able to write the hwdef.dat file for a new board with just the # schematic for the board. # This file is processed by chibios_hwdef.py to create hwdef.h for # this board. You may find it useful to run chibios_hwdef.py manually # when building this file for a new board. The resulting hwdef.h file # is formatted to make it quite readable. It is strongly suggested # that you read the resulting hwdef.h file when porting to a new board # to make sure it has resulted in what you want. # You should read this file in conjunction with the schematic for your # board, the datasheet for the MCU for your board and the python # tables file that we have extracted from the datasheet for your # MCU. The python tables file is particularly important, so if you # haven't seen it before go and look at it now. For the STM32F427 it # it called STM32F427xx.py and it is in the hwdef/script/ directory # inside the HAL_ChibiOS directory. That file tells you what each pin # can do (the alternate functions table) and what DMA channels can be # used for each peripheral type. The alternative functions table is # particularly useful when doing a new hwdef.dat file as you can work # out peripheral numbers given a port/pin name. # We need to start off by saying what main CPU is on the board. There # are two CPU identifiers that you need to specify. The first is the # ChibiOS MCU type. The second string needs to match the name of a config # file in the libraries/AP_HAL_ChibiOS/hwdef/script directory. # In this case we are using a H743 MCU, so we select STM32H743xx to match the # STM32H743xx.py file in the script directory. If you are supporting a # board type that doesn't have a python hardware database file yet # then you will need to create one. There are scripts in the scripts # directory to help with that by parsing the STM32 datasheets to # extract the required DMA and alternate function tables. # MCU class and specific type MCU STM32H7xx STM32H743xx # Now we need to specify the APJ_BOARD_ID. This is the ID that the # bootloader presents to GCS software so it knows if this firmware is # suitable for the board. Please see # https://github.com/ArduPilot/Bootloader/blob/master/hw_config.h for # a list of current board IDs. If you add a new board type then please # get it added to that repository so we don't get conflicts. # Note that APJ is "ArduPilot JSON Firmware Format". # board ID for firmware load APJ_BOARD_ID 1018 # Now you need to say what crystal frequency you have for this # board. All of the clocks are scaled against this. Typical values are # 24000000 or 8000000. # crystal frequency, setup to use external oscillator OSCILLATOR_HZ 8000000 # Now the size of flash in kilobytes, for creating the ld.script. # flash size FLASH_SIZE_KB 2048 env OPTIMIZE -Os # bootloader takes first sector FLASH_RESERVE_START_KB 128 # On some boards you will need to also set the various PLL values. See # the defaults in common/mcuconf.h, and use the define mechanism # explained later in this file to override values suitable for your # board. Refer to your MCU datasheet or examples from supported boards # in ChibiOS for the right values. # Now define the voltage the MCU runs at. This is needed for ChibiOS # to set various internal driver limits. It is in 0.01 volt units. # This is the STM32 timer that ChibiOS will use for the low level # driver. This must be a 32 bit timer. We currently only support # timers 2, 3, 4, 5 and 21. See hal_st_lld.c in ChibiOS for details. # ChibiOS system timer STM32_ST_USE_TIMER 12 define CH_CFG_ST_RESOLUTION 16 # Now define which UART is used for printf(). We rarely use printf() # in ChibiOS, so this is really only for debugging very early startup # in drivers. # Serial port for stdout. This is optional. If you leave it out then # output from printf() lines will go to the ArduPilot console, which is the # first UART in the SERIAL_ORDER list. But note that some startup code # runs before USB is set up. # The value for STDOUT_SERIAL is a serial device name, and must be for a # serial device for which pins are defined in this file. For example, SD7 # is for UART7 (SD7 == "serial device 7" in ChibiOS). #STDOUT_SERIAL SD7 #STDOUT_BAUDRATE 57600 # Now the USB setup, if you have USB. All of these settings are # option, and the ones below are the defaults. It ends up creating a # USB ID on Linux like this: # /dev/serial/by-id/usb-ArduPilot_fmuv3_3E0031000B51353233343932-if00 # If creating a board for a RTF vehicle you may wish to customise these. # USB setup USB_STRING_MANUFACTURER "DanielDual" # Now we define the pins that USB is connected on. PA11 OTG_FS_DM OTG1 PA12 OTG_FS_DP OTG1 # OTG USB Detect PE2 EXT_CS2 CS # These are the pins for SWD debugging with a STlinkv2 or black-magic probe. PA13 JTMS-SWDIO SWD PA14 JTCK-SWCLK SWD # Now the first SPI bus. At minimum you need SCK, MISO and MOSI pin # definitions. You can add speed modifiers if you want them, otherwise # the defaults for the peripheral class are used. # SPI1 for IMU1 (BMI270) PC15 IMU1_CS CS PA5 SPI1_SCK SPI1 PA6 SPI1_MISO SPI1 PD7 SPI1_MOSI SPI1 # This is the invensense data-ready pin. We don't use it in the # default driver. #PB2 MPU_DRDY INPUT # SPI2 for MAX7456 OSD PB12 MAX7456_CS CS PB13 SPI2_SCK SPI2 PB14 SPI2_MISO SPI2 PB15 SPI2_MOSI SPI2 # This is the invensense data-ready pin. We don't use it in the # default driver. #PE15 MPU_DRDY INPUT # SPI3 for SPI flash - W25N01GV PD3 FLASH_CS CS PB3 SPI3_SCK SPI3 PB4 SPI3_MISO SPI3 PB5 SPI3_MOSI SPI3 # SPI4 for IMU2 (BMI270) PE11 IMU2_CS CS PE12 SPI4_SCK SPI4 PE13 SPI4_MISO SPI4 PE14 SPI4_MOSI SPI4 # Now define the order that I2C buses are presented in the hal.i2c API # in ArduPilot. For historical reasons inherited from HAL_PX4 the # 'external' I2C bus should be bus 1 in hal.i2c, and internal I2C bus # should be bus 0. On fmuv3 the STM32 I2C1 is our external bus and # I2C2 is our internal bus, so we need to setup the order as I2C2 # followed by I2C1 in order to achieve the conventional order that # drivers expect. # two I2C bus, order of I2C buses I2C_ORDER I2C2 I2C1 # Now the first I2C bus. The pin speeds are automatically setup # correctly, but can be overridden here if needed. # I2C1 PB6 I2C1_SCL I2C1 PB7 I2C1_SDA I2C1 # I2C2 PB10 I2C2_SCL I2C2 PB11 I2C2_SDA I2C2 # Now define the primary battery connectors. The labels we choose here # are used to create defines for pins in the various drivers, so # choose names that match existing board setups where possible. Here # we define two pins PA2 and PA3 for voltage and current sensing, with # a scale factor of 1.0 and connected on ADC1. The pin number this # maps to in hal.adc is automatically determined using the datasheet # tables in STM32F427xx.py. # ADC for Power PC0 BATT_VOLTAGE_SENS ADC1 SCALE(1) PC1 BATT_CURRENT_SENS ADC1 SCALE(1) # This adds a C define which sets up the ArduPilot architecture # define. Any line starting with 'define' is copied literally as # a #define in the hwdef.h header. # Now setup the default battery pins driver analog pins and default # scaling for the power brick. define HAL_BATT_MONITOR_DEFAULT 4 define HAL_BATT_VOLT_PIN 10 define HAL_BATT_CURR_PIN 11 define HAL_BATT_VOLT_SCALE 11.0 define HAL_BATT_CURR_SCALE 40.0 # ADC for airspeed PC4 PRESSURE_SENS ADC1 SCALE(2) define HAL_DEFAULT_AIRSPEED_PIN 4 # ADC for rssi PC5 RSSI_ADC ADC1 define BOARD_RSSI_ANA_PIN 8 # Define a LED, mapping it to GPIO(0). LOW will illuminate the LED # PE12 FMU_LED_AMBER OUTPUT HIGH OPENDRAIN GPIO(0) # green LED1 marked as B/E # blue LED0 marked as ACT PE3 LED0 OUTPUT LOW GPIO(90) # blue PE4 LED1 OUTPUT LOW GPIO(91) # orange define HAL_GPIO_A_LED_PIN 91 define HAL_GPIO_B_LED_PIN 90 define HAL_GPIO_LED_OFF 1 # Now the serial ordering. These map to the SERIALn_ parameter numbers # If you use a shorter list then HAL_Empty::UARTDriver # objects are substituted for later UARTs, or you can leave a gap by # listing one or more of the uarts as EMPTY. # The normal usage of this ordering is: # 1) SERIAL0: console (primary mavlink, usually USB) # 2) SERIAL1: Telemetry # 3) SERIAL2: Optical Flow # 4) SERIAL3: GPS # 5) SERIAL4: VTX # 6) SERIAL5: ESC Telemetry # 7) SERIAL6: spare # 8) SERIAL7: RC input # order of UARTs (and USB) SERIAL_ORDER OTG1 UART4 UART8 USART2 USART3 USART6 UART7 USART1 # Now we start on the pin definitions. Every pin used by ArduPilot # needs to be in this file. The pins in this file can be defined in any order. # The format is P+port+pin. So PC4 is portC pin4. # For every pin the second column is the label. If this is a # peripheral that has an alternate function defined in the STM32 # datasheet then the label must be the name of that alternative # function. The names are looked up in the python database for this # MCU. Please see STM32F427xx.py for the F427 database. That database # is used to automatically fill in the alternative function (and later # for the DMA channels). # The third column is the peripheral type. This must be one of the # following: UARTn, USARTn, OTGn, SPIn, I2Cn, ADCn, TIMn, SWD, SDIO, # INPUT, OUTPUT, CS. # The fourth and later columns are for modifiers on the pin. The # possible modifiers are: # pin speed: SPEED_VERYLOW, SPEED_LOW, SPEED_MEDIUM, SPEED_HIGH # pullup: PULLUP, PULLDOWN, FLOATING # out type: OPENDRAIN, PUSHPULL # default value: LOW, HIGH # Additionally, each class of pin peripheral can have extra modifiers # suitable for that pin type. For example, for an OUTPUT you can map # it to a GPIO number in hal.gpio using the GPIO(n) modifier. For ADC # inputs you can apply a scaling factor (to bring it to unit volts) # using the SCALE(x) modifier. See the examples below for more # modifiers, or read the python code in chibios_hwdef.py. # Now we define UART4 which is for the GPS. Be careful # of the difference between USART and UART. Check the STM32F427xx.py # if unsure which it is. For a UART we need to specify at least TX and # RX pins. # USART1 (RC input), SERIAL7 PA9 USART1_TX USART1 NODMA PA10 TIM1_CH3 TIM1 RCININT PULLDOWN LOW # as an alternative config setup the RX6 pin as a uart. This allows # for bi-directional UART based receiver protocols such as FPort # without any extra hardware PA10 USART1_RX USART1 NODMA ALT(1) # This sets up the UART for talking to the IOMCU. Note that it is # vital that this UART has DMA available. See the DMA settings below # for more information. # USART2 (GPS), SERIAL3 PD5 USART2_TX USART2 PD6 USART2_RX USART2 # USART3 (VTX), SERIAL4 PD8 USART3_TX USART3 NODMA PD9 USART3_RX USART3 NODMA # UART4 (Telemetry), SERIAL1 PB8 UART4_RX UART4 NODMA PB9 UART4_TX UART4 NODMA # USART6 (ESC Telemetry), SERIAL5* PC6 USART6_TX USART6 PC7 USART6_RX USART6 # UART7 (spare), SERIAL6* PE7 UART7_RX UART7 NODMA PE8 UART7_TX UART7 NODMA # UART8 (Optical Flow), SERIAL2 PE0 UART8_RX UART8 NODMA PE1 UART8_TX UART8 NODMA # Now we start defining some PWM pins. We also map these pins to GPIO # values, so users can set BRD_PWM_COUNT to choose how many of the PWM # outputs on the primary MCU are setup as PWM and how many as # GPIOs. To match HAL_PX4 we number the GPIOs for the PWM outputs # starting at 50. # Motors PB0 TIM3_CH3 TIM3 PWM(1) GPIO(50) BIDIR PB1 TIM3_CH4 TIM3 PWM(2) GPIO(51) PA0 TIM2_CH1 TIM2 PWM(3) GPIO(52) BIDIR PA1 TIM2_CH2 TIM2 PWM(4) GPIO(53) PA2 TIM5_CH3 TIM5 PWM(5) GPIO(54) BIDIR PA3 TIM5_CH4 TIM5 PWM(6) GPIO(55) PD12 TIM4_CH1 TIM4 PWM(7) GPIO(56) BIDIR PD13 TIM4_CH2 TIM4 PWM(8) GPIO(57) # This defines the PWM pin for the buzzer (if there is one). It is # also mapped to a GPIO output so you can play with the buzzer via # MAVLink relay commands if you want to. # PWM output for buzzer/Beeper PA15 BUZZER OUTPUT GPIO(32) LOW define HAL_BUZZER_PIN 32 # This defines a couple of general purpose outputs, mapped to GPIO # numbers 1 and 2 for users. # GPIOs for pinio PD10 PINIO1 OUTPUT GPIO(81) LOW PD11 PINIO2 OUTPUT GPIO(82) LOW # DMA Priority DMA_PRIORITY SPI1* SPI4* DMA_NOSHARE SPI1* SPI4* TIM3* TIM2* TIM5* TIM4* # use last 2 pages for flash storage # H743 has 16 pages of 128k each STORAGE_FLASH_PAGE 14 define HAL_STORAGE_SIZE 32768 # Now the SPI device table. This table creates all accessible SPI # devices, giving the name of the device (which is used by device # drivers to open the device), plus which SPI bus it it on, what # device ID will be used (which controls the IDs used in parameters # such as COMPASS_DEV_ID, so we can detect when the list of devices # changes between reboots for calibration purposes), the SPI mode to # use, and the low and high speed settings for the device. # You can define more SPI devices than you actually have, to allow for # flexibility in board setup, and the driver code can probe to see # which are responding. # The DEVID values and device names are chosen to match the PX4 port # of ArduPilot so users don't need to re-do their accel and compass # calibrations when moving to ChibiOS. # spi devices SPIDEV bmi270_1 SPI1 DEVID1 IMU1_CS MODE3 10*MHZ 10*MHZ SPIDEV bmi270_2 SPI4 DEVID1 IMU2_CS MODE3 10*MHZ 10*MHZ SPIDEV dataflash SPI3 DEVID1 FLASH_CS MODE3 104*MHZ 104*MHZ SPIDEV osd SPI2 DEVID4 MAX7456_CS MODE0 10*MHZ 10*MHZ # two IMUs IMU BMI270 SPI:bmi270_1 ROTATION_ROLL_180_YAW_90 IMU BMI270 SPI:bmi270_2 ROTATION_ROLL_180 # DPS310 integrated on I2C2 bus, multiple possible choices for external barometer BARO DPS310 I2C:0:0x76 # no built-in compass, but probe the i2c bus for all possible # external compass types define ALLOW_ARM_NO_COMPASS define HAL_PROBE_EXTERNAL_I2C_COMPASSES define HAL_I2C_INTERNAL_MASK 0 define HAL_COMPASS_AUTO_ROT_DEFAULT 2 # setup for OSD define OSD_ENABLED 1 define HAL_OSD_TYPE_DEFAULT 1 ROMFS_WILDCARD libraries/AP_OSD/fonts/font*.bin # enable logging to dataflash define HAL_LOGGING_DATAFLASH_DRIVER AP_Logger_W25N01GV- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
- 344
- 345
- 346
- 347
- 348
- 349
- 350
- 351
- 352
- 353
- 354
- 355
- 356
- 357
- 358
- 359
- 360
- 361
- 362
- 363
- 364
- 365
- 366
- 367
- 368
- 369
- 370
- 371
- 372
- 373
- 374
- 375
- 376
- 377
- 378
- 379
- 380
- 381
- 382
- 383
- 384
- 385
- 386
- 387
- 388
- 389
- 390
- 391
- 392
- 393
- 394
- 395
- 396
- 397
- 398
- 399
- 400
- 401
- 402
3. 4.3.6固件编译
Step 1: 获取源代码
# git clone https://github.com/ArduPilot/ardupilot.git # git checkout Copter-4.3.6 # git submodule update --init --recursive- 1
- 2
- 3
Step 2: 准备编译环境
详见:ArduPilot飞控AOCODARC-H7DUAL固件编译
注:正式编译前,最好清理下
./waf distclean。Step 3: 复制配置文件
将H743-BMI270x2-v22.zip解压,移动到
libraries\AP_HAL_ChibiOS\hwdef目录下Step 4: 编译bootloader
./Tools/scripts/build_bootloaders.py H743_BMI270x2_v22- 1
Step 5: 编译飞控
首先,同步下子模块的同步,确保所有子模块都已经下载到本地后,再开始编译。
# ./Tools/gittools/submodule-sync.sh- 1
根据配置文件对飞控进行配置,生成相应的头文件。
# ./waf configure --board H743_BMI270x2_v22- 1
编译飞控固件
# ./waf copter- 1
4. 基础配置
4.1 机型配置
根据模型进行配置,笔者是X型的反装电机。因为是从Betaflight转过来,可以认为是Betaflight X reversed配置。
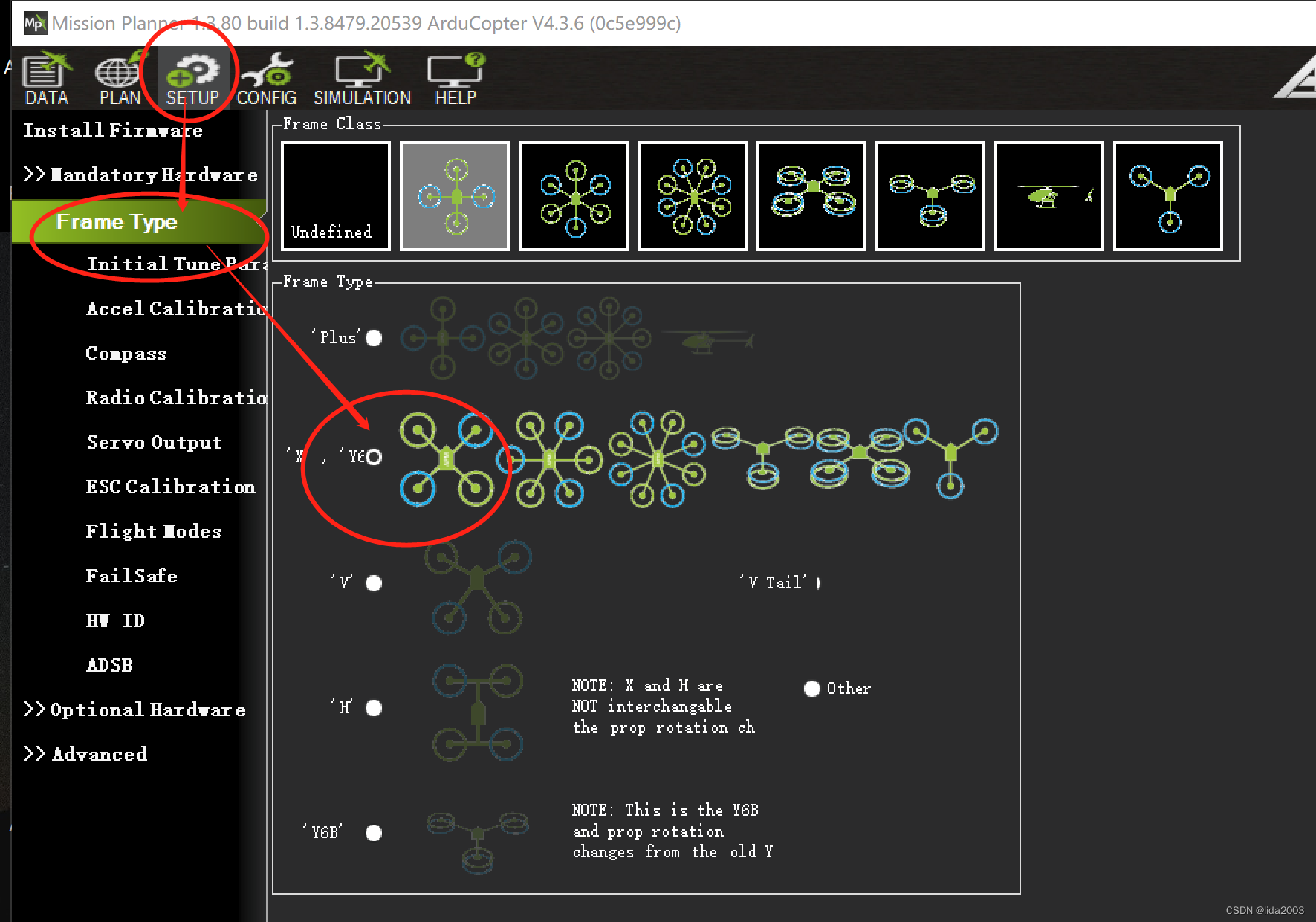
笔者是选择了Betaflight配置构型。
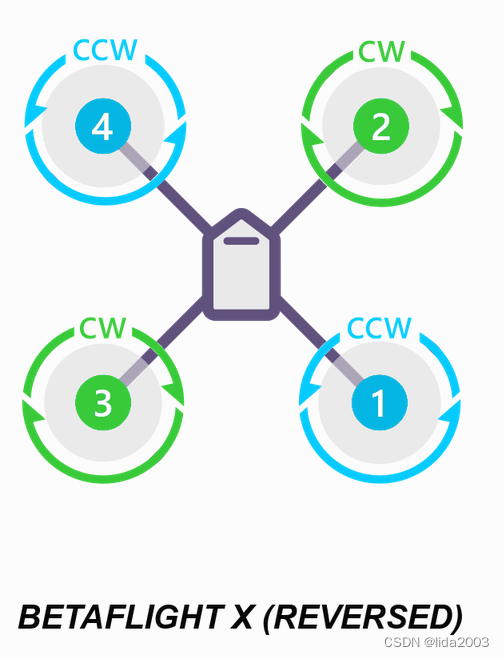
需要进一步,确认一下参数是否正确。FRAME_CLASS = 1 //quad
FRAME_TYPE = 18 // betaflight x reversed4.2 IMU校准
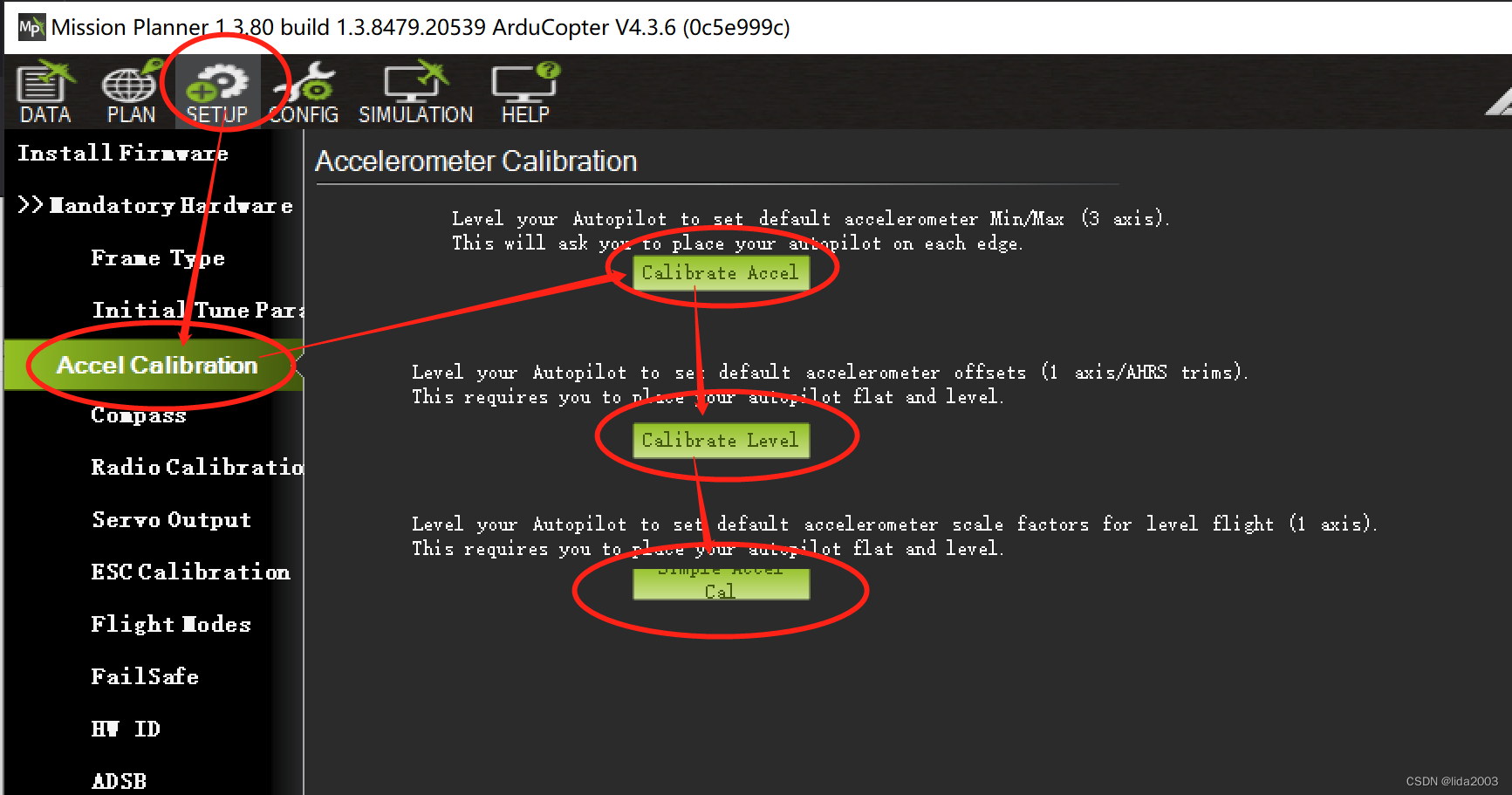
因为是双IMU,所以请确认一下参数是否使用正确的配置。
EK3_IMU_MASK = 3 //表示使用两个IMU硬件
4.3 电机校准
笔者使用的是BlueJay固件,支持bi-directional dshot600。
注:这里从配置的角度是这么设置的,但是目前尚未看到双向dshot给出的RPM值。
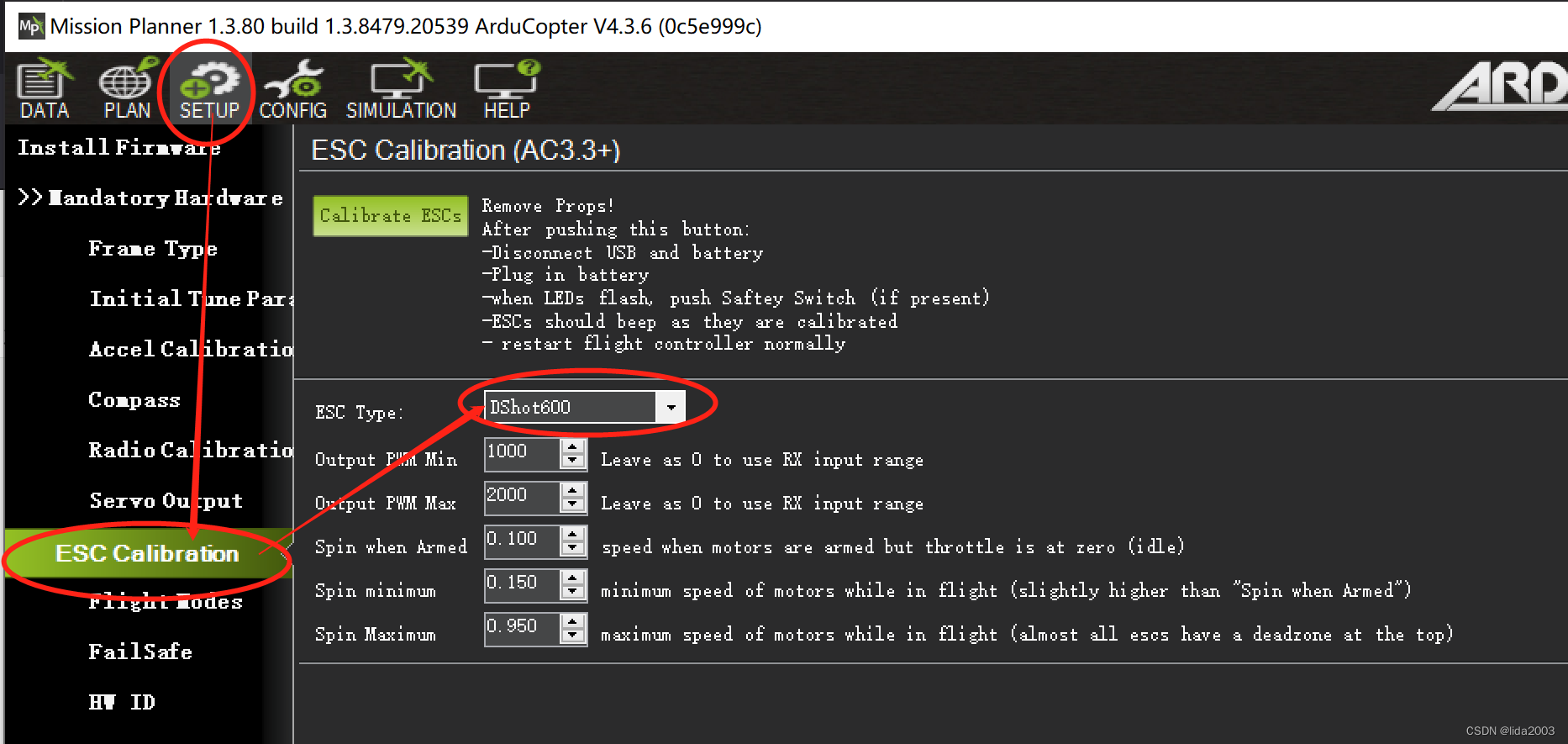
后台参数请确认:SERIAL5_PROTOCOL = 16 //ESC telemetry
MOT_PWM_TYPE = 6 // Dshot600
SERVO_BLH_AUTO = 1
SERVO_BLH_TRATE = 10 //10Hz
SERVO_BLH_BDMASK = 15
SERVO_BLH_POLES = 14
SERVO_BLH_OTYPE = 6 //dshot600
SERVO_DSHOT_ESC = 2 //BLHeli_S
SERVO_DSHOT_RATE = 0 //default 1khz对于电机测试顺序如下:
注:要确保顺序一致,如有问题,请不要起飞,因为肯定飞不起来的。

4.4. ELRS接收机
BRD_ALT_CONFIG = 1
SERIAL7_PROTOCOL = 23
SERIAL7_OPTIONS = 0
RC_PROTOCOLS = 1
RSSI_TYPE = 3
RC_OPTIONS = 544 //RC_OPTIONS turn on Bit 9th which is “Suppress CRSF mode/rate message for ELRS systems”.
SERIAL7_BAUD = 115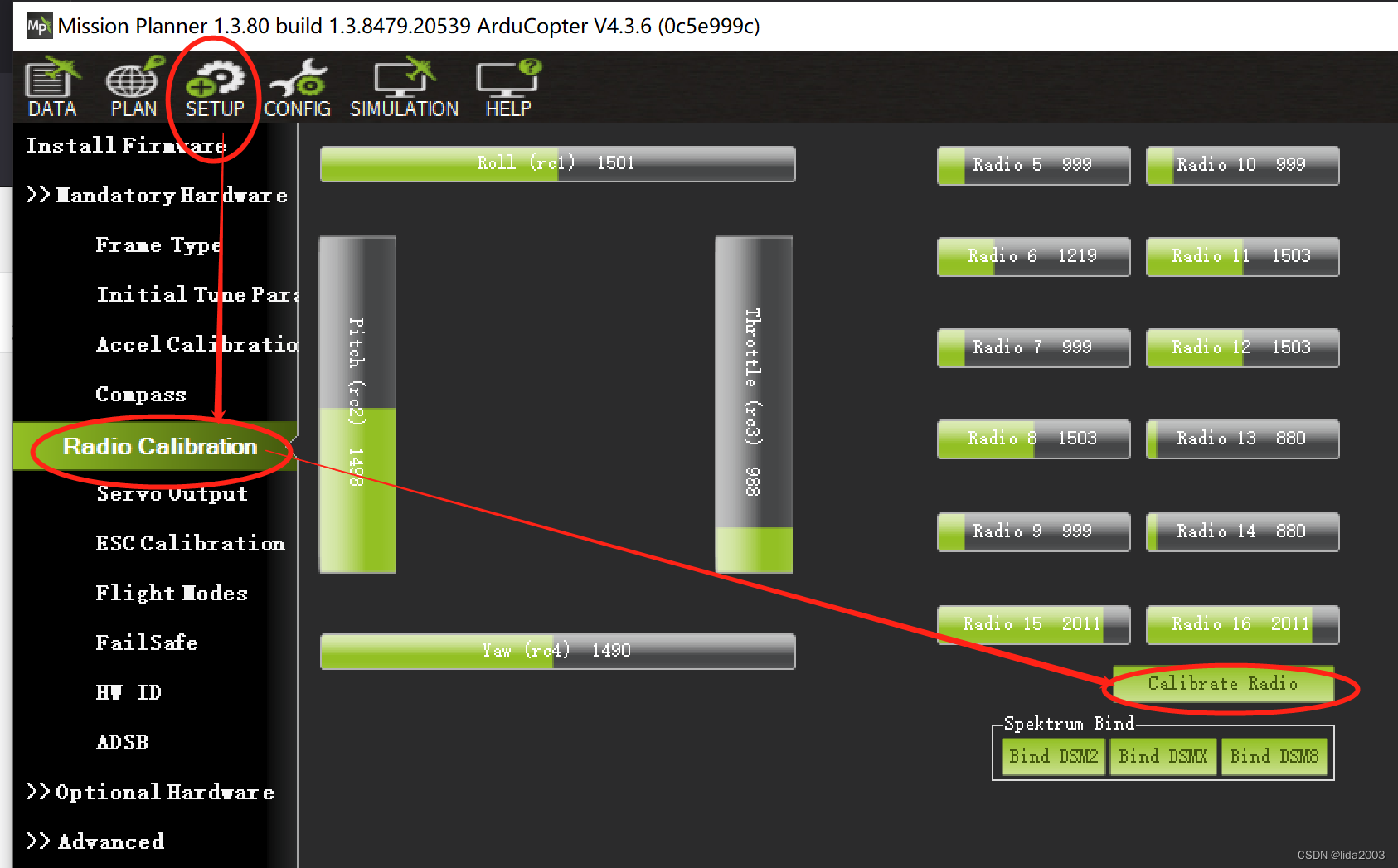
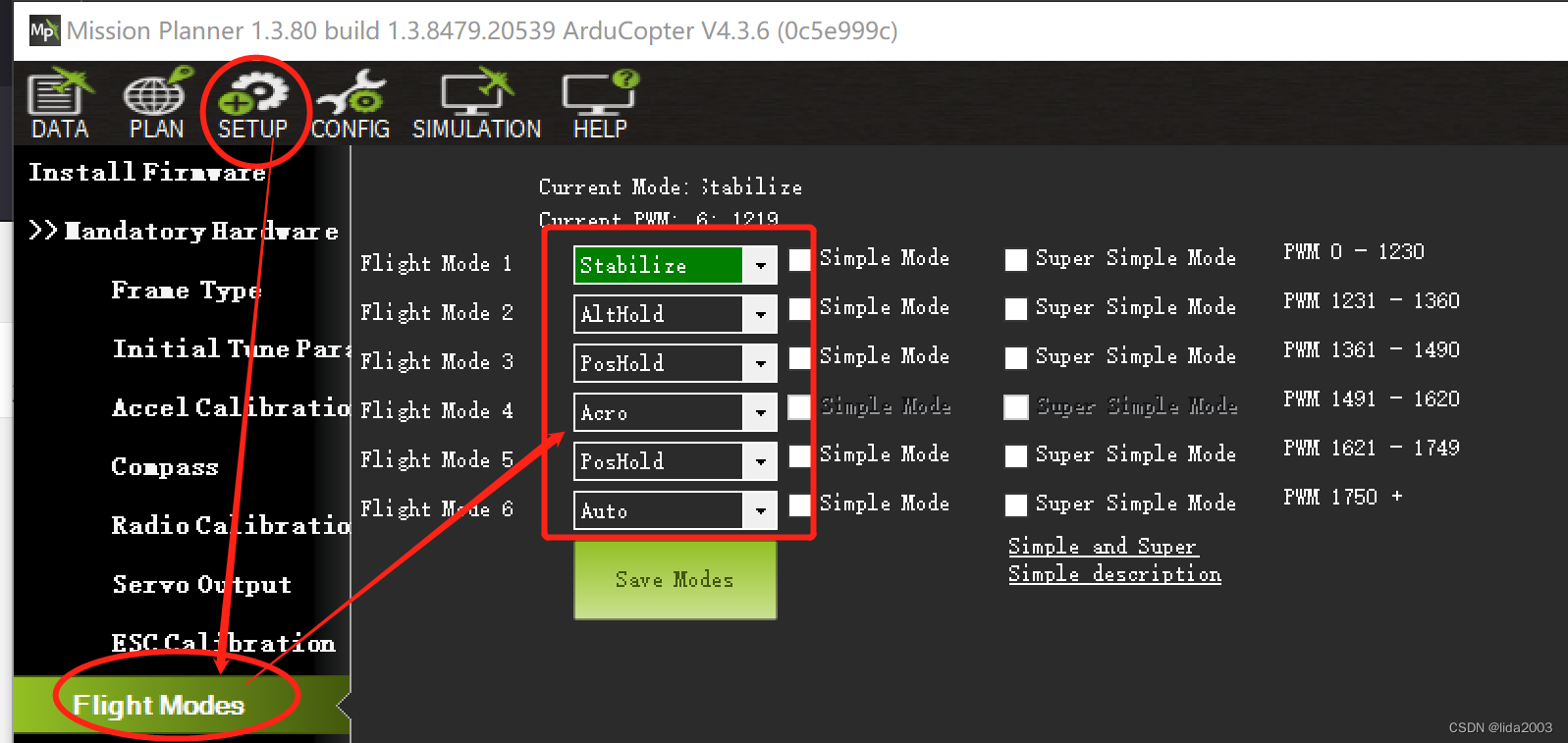
4.5 飞行模式配置
请根据各自遥控器上的设置选择哪个通道作为飞行模式。
FLTMODE_CH = 6
注:笔者采用TX12配置A+C,进行6个模式选择。
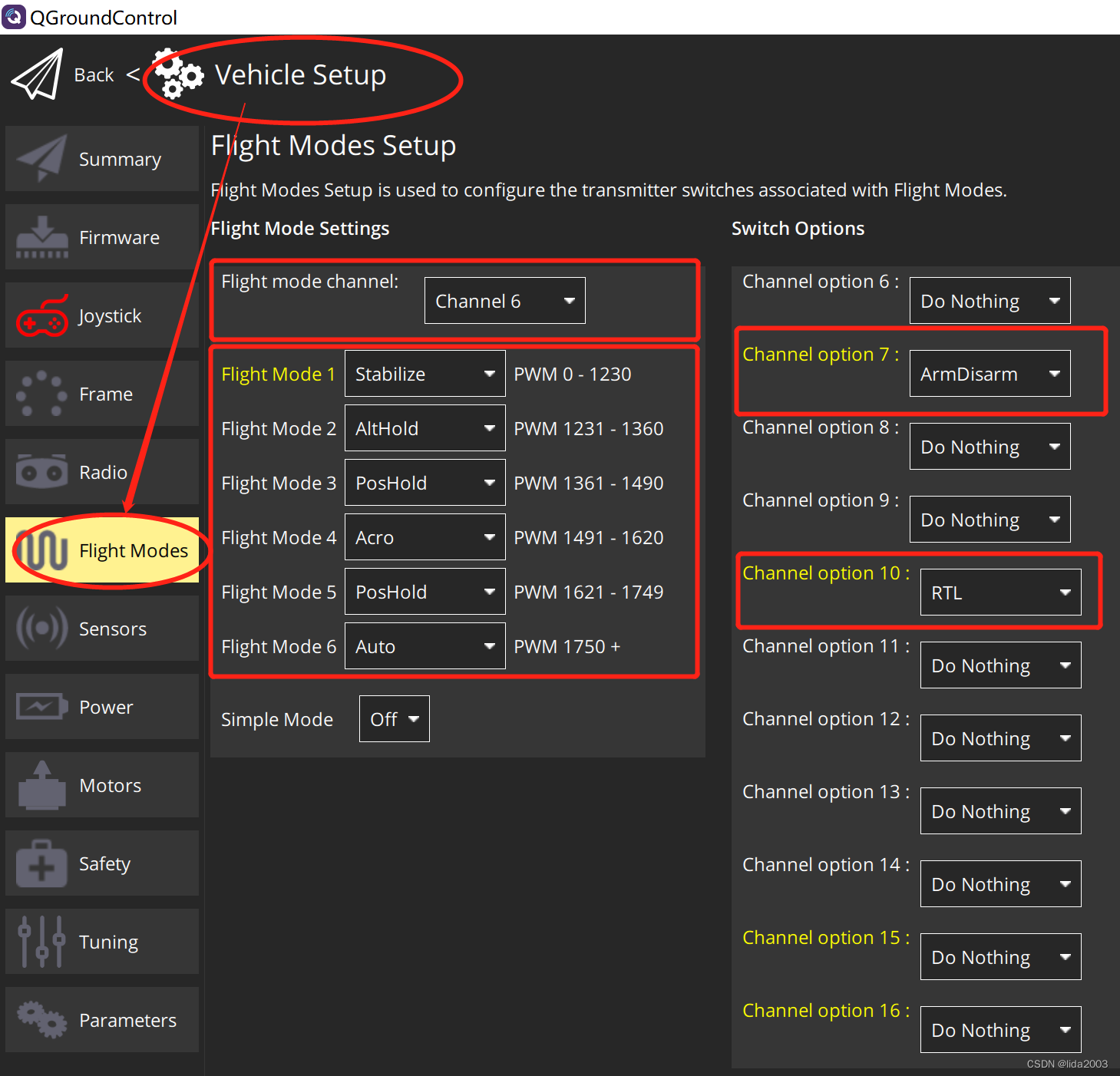
4.6 功能配置
QGC功能在遥控设置这块比较好,因此,推荐设置【RTL】和【ArmDisarm】功能。
5. 总结
上述配置,经过实际试飞:
【1】稳定悬停;
【2】前进/后退/左倾/右倾正常;
【3】电压显示正常
【4】磁力计正常
【5】GPS正常已知问题:
【1】【已解决】VTX尚不能正常工作请使用H743-BMI270x2-v24.zip解决VTX正常输出问题
设置VTX_OPTIONS = 1(默认pit模式),然后RCx_OPTION = 94(通过遥控某个通道打开图传)【2】【存疑】VTX在TX12遥控器无法设置0mW,100mW,200mW,400mW, 600mW分段控制
目前仅支持 0mW, 100mW, 200mW,400mW,无法设置600mW
【3】【已解决】飞控直接上电启动连MP,姿态显示异常(先连QGC再连MP正常)
【4】【存疑】双向Dshot似乎并未正常工作,RPM转速未在MP上看到
因此v24版本去掉了bdshot功能,维持dshot功能。
【5】【待移植/配置】mavlink esp32尚未启用
【6】【已解决】外置Flash log功能尚未正常
SPI外置Flash功能未打开
# enable logging to dataflash define HAL_LOGGING_DATAFLASH_ENABLED 1 define HAL_LOGGING_DATAFLASH_DRIVER AP_Logger_W25N01GV- 1
- 2
- 3
鉴于目前资源缺少,从厂家和ArduPilot官方反馈的技术信息有限,可能需要折腾一段时间。
注:后续会继续更新,确保整体功能正常,合适远航位置!
6. 参考资料
【1】BetaFlight Mark4 H7 Dual270 + BN880 + CRSF 配置存档
【2】ArduPilot硬件AOCODARC H7DUAL配置文件讨论
【3】ArduPilot飞控AOCODARC-H7DUAL固件编译
【4】ArduPilot Kakute F7 AIO DIYF450 without GPS配置
【5】ArduPilot: Porting to a new flight controller board
【6】ArduPilot: esc-calibration
【7】ArduPilot: common-dshot-escs
【8】ArduPilot: common-vtx -
相关阅读:
进度条程序的编写
APP稳定性测试-monkey日志分析及内存泄漏分析
STM32单片机的知识点总结
SIT1050,可替代TIJA050,5V 供电,±40V 接口耐压,1Mbps 高速 CAN 总线收发器
Unity—UGUI
Linux用户权限切换
2023年中国GPS导航设备产量、销量及市场规模分析[图]
秋招春招,如何应对在线测评环节?
python异步编程之asyncio低阶API
网络应用层之(1)DHCPv6协议
- 原文地址:https://blog.csdn.net/lida2003/article/details/130911949
