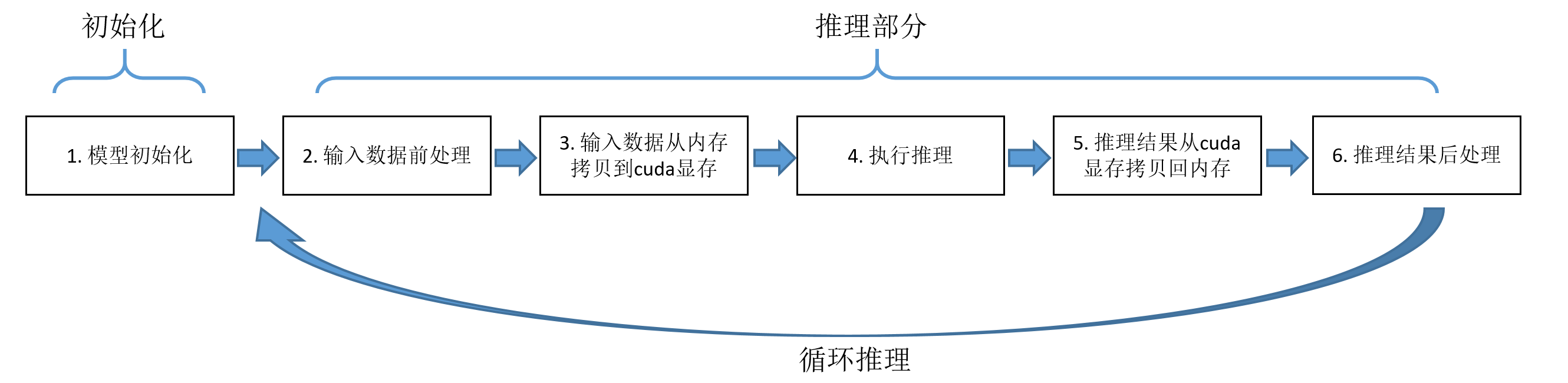
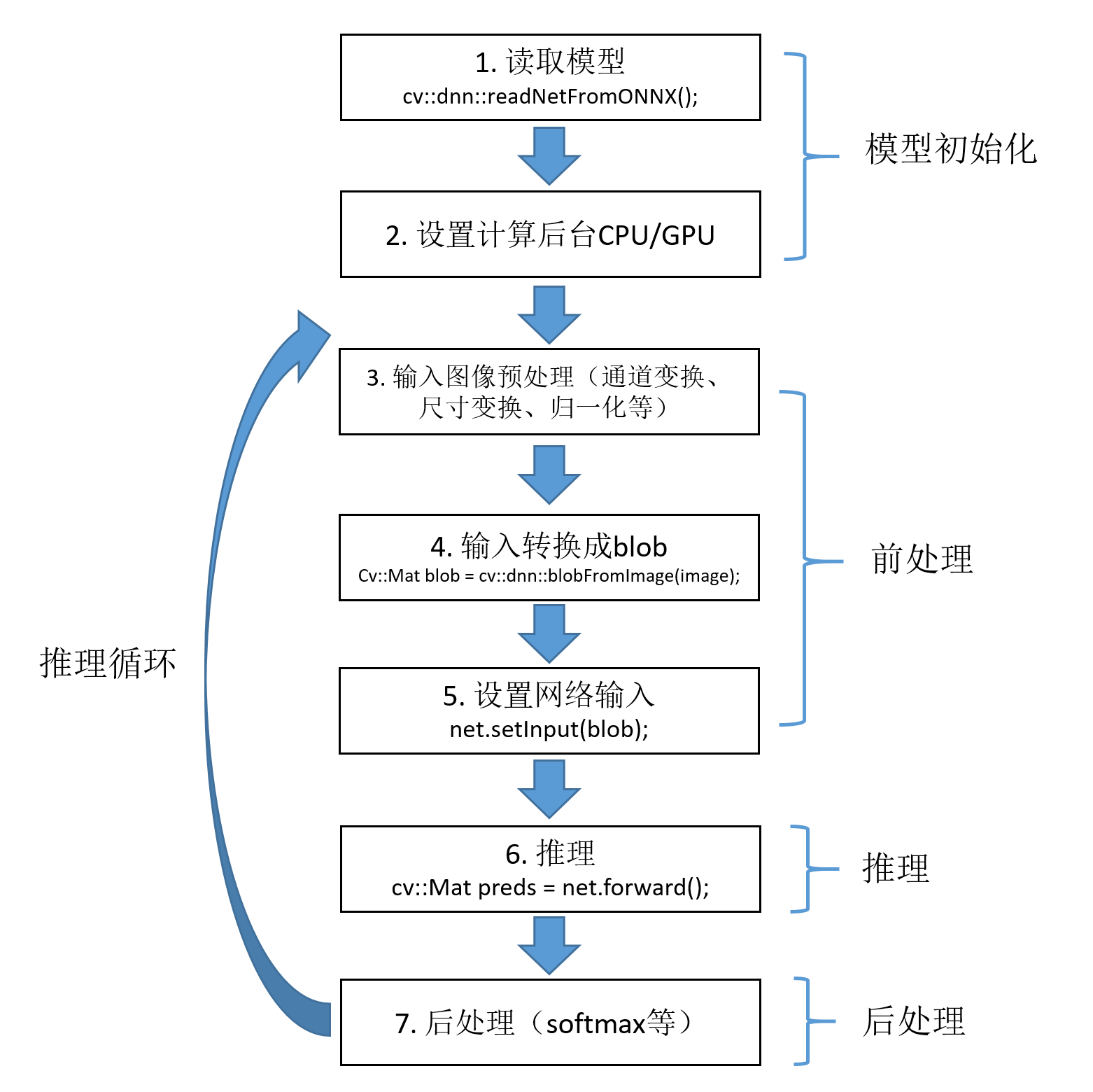
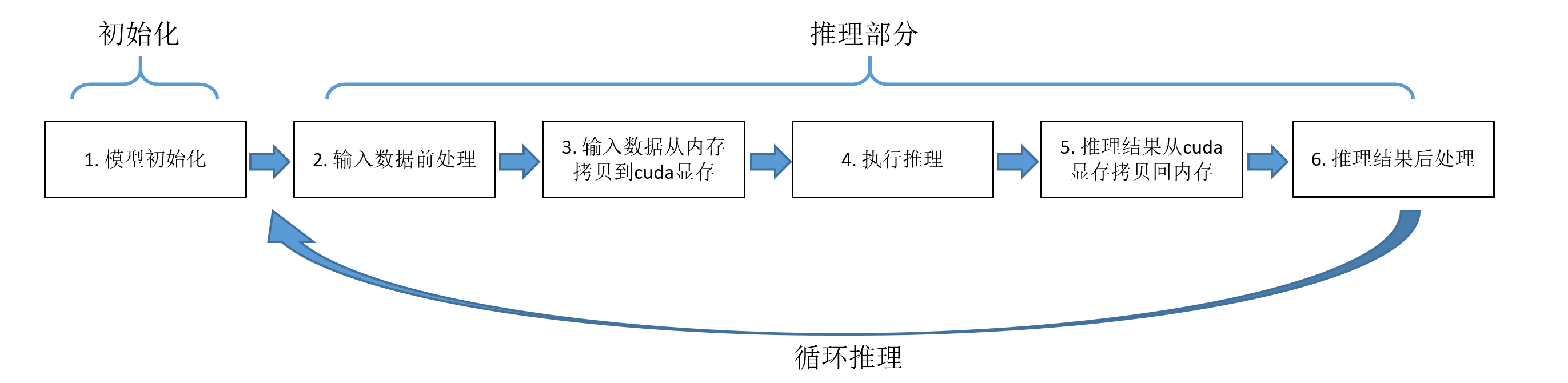
深度学习领域常用的基于CPU/GPU的推理方式有OpenCV DNN、ONNXRuntime、TensorRT以及OpenVINO。这几种方式的推理过程可以统一用下图来概述。整体可分为模型初始化部分和推理部分,后者包括步骤2-5。
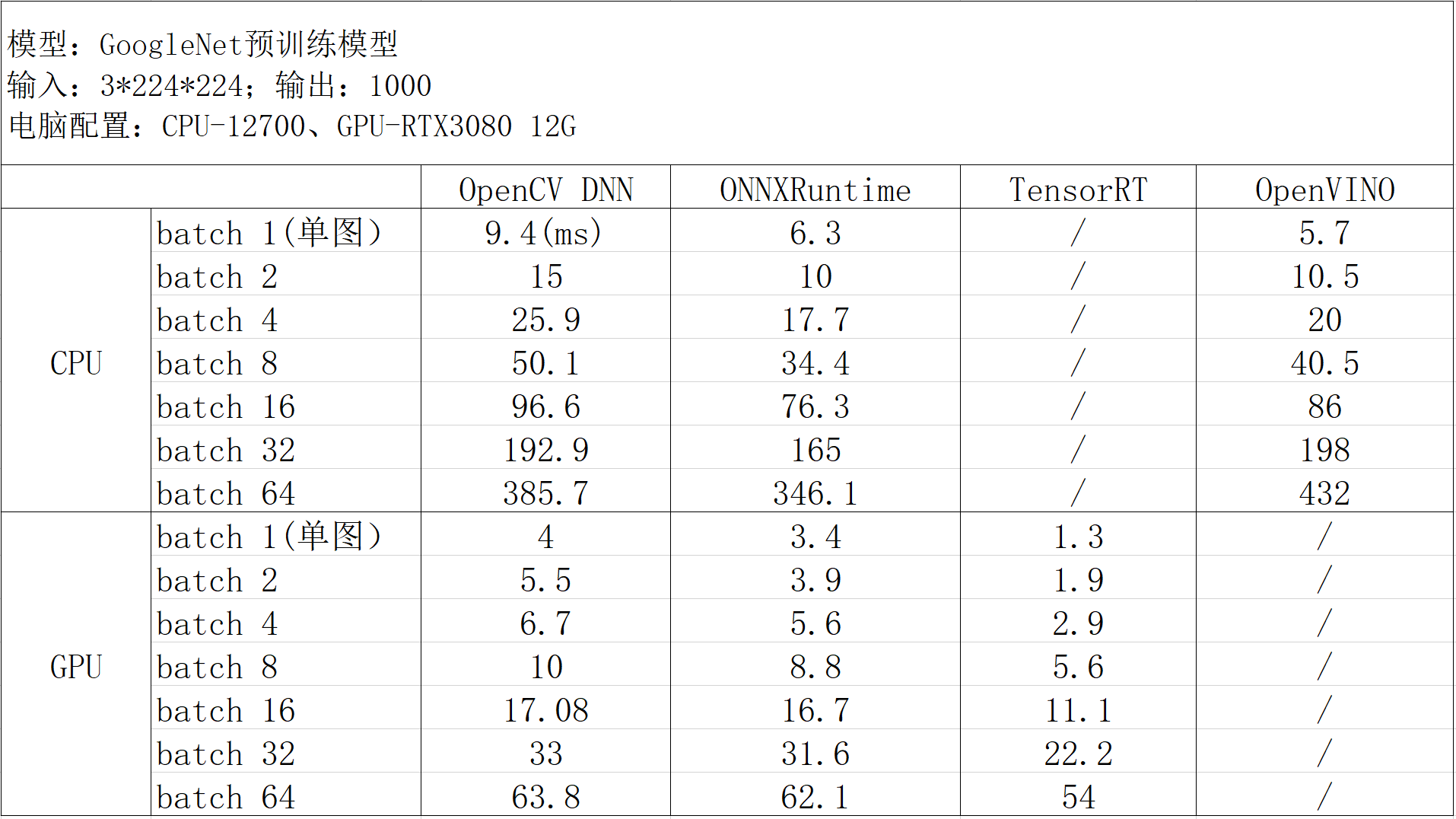
以GoogLeNet模型为例,测得几种推理方式在推理部分的耗时如下:
结论:
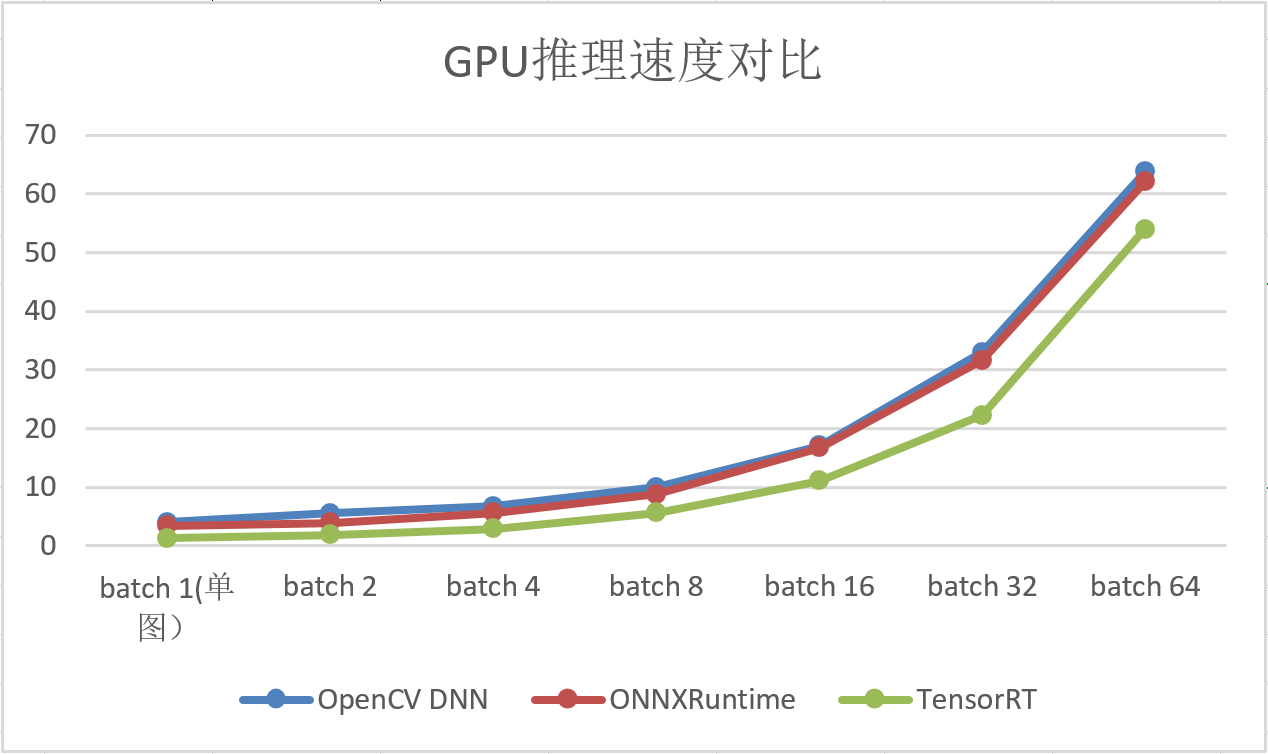
- GPU加速首选TensorRT;
- CPU加速,单图推理首选OpenVINO,多图并行推理可选择ONNXRuntime;
- 如果需要兼具CPU和GPU推理功能,可选择ONNXRuntime。
下一篇内容:【模型部署 02】Python实现GoogLeNet在OpenCV DNN、ONNXRuntime、TensorRT、OpenVINO上的推理部署
1. 环境配置
1.1 OpenCV DNN
【模型部署】OpenCV4.6.0+CUDA11.1+VS2019环境配置
1.2 ONNXRuntime
【模型部署】在C++和Python中配置ONNXRuntime环境
1.3 TensorRT
【模型部署】在C++和Python中搭建TensorRT环境
1.4 OpenVINO2022
【模型部署】在C++和Python中配置OpenVINO2022环境
2. PyTorch模型文件(pt/pth/pkl)转ONNX
2.1 pt/pth/pkl互转
PyTorch中支持导出三种后缀格式的模型文件:pt、pth和pkl,这三种格式在存储方式上并无区别,只是后缀不同。三种格式之间的转换比较简单,只需要创建模型并加载模型参数,然后再保存为其他格式即可。
以pth转pt为例:
1 2 3 4 5 6 7 8 9 10 | import torchimport torchvision# 构建模型model = torchvision.models.googlenet(num_classes=2, init_weights=True)# 加载模型参数,pt/pth/pkl三种格式均可model.load_state_dict(torch.load("googlenet_catdog.pth"))model.eval()# 重新保存为所需要转换的格式torch.save(model.state_dict(), 'googlenet_catdog.pt') |
2.2 pt/pth/pkl转ONNX
PyTorch中提供了现成的函数torch.onnx.export(),可将模型文件转换成onnx格式。该函数原型如下:
1 2 3 4 5 | export(model, args, f, export_params=True, verbose=False, training=TrainingMode.EVAL, input_names=None, output_names=None, operator_export_type=None, opset_version=None, do_constant_folding=True, dynamic_axes=None, keep_initializers_as_inputs=None, custom_opsets=None, export_modules_as_functions=False) |
主要参数含义:
- model (torch.nn.Module, torch.jit.ScriptModule or torch.jit.ScriptFunction) :需要转换的模型。
- args (tuple or torch.Tensor) :args可以被设置为三种形式:
- 一个tuple,这个tuple应该与模型的输入相对应,任何非Tensor的输入都会被硬编码入onnx模型,所有Tensor类型的参数会被当做onnx模型的输入。
1
args=(x, y, z) - 一个Tensor,一般这种情况下模型只有一个输入。
1
args=torch.Tensor([1,2,3]) - 一个带有字典的tuple,这种情况下,所有字典之前的参数会被当做“非关键字”参数传入网络,字典中的键值对会被当做关键字参数传入网络。如果网络中的关键字参数未出现在此字典中,将会使用默认值,如果没有设定默认值,则会被指定为None。
123
args=(x,{'y': input_y,'z': input_z})NOTE:一个特殊情况,当网络本身最后一个参数为字典时,直接在tuple最后写一个字典则会被误认为关键字传参。所以,可以通过在tuple最后添加一个空字典来解决。
123456789101112131415# 错误写法:torch.onnx.export(model,(x,# WRONG: will be interpreted as named arguments{y: z}),"test.onnx.pb")# 纠正torch.onnx.export(model,(x,{y: z},{}),"test.onnx.pb")
- 一个tuple,这个tuple应该与模型的输入相对应,任何非Tensor的输入都会被硬编码入onnx模型,所有Tensor类型的参数会被当做onnx模型的输入。
- f:一个文件类对象或一个路径字符串,二进制的protocol buffer将被写入此文件,即onnx文件。
- export_params (bool, default False) :如果为True则导出模型的参数。如果想导出一个未训练的模型,则设为False。
- verbose (bool, default False) :如果为True,则打印一些转换日志,并且onnx模型中会包含doc_string信息。
- training (enum, default TrainingMode.EVAL) :枚举类型包括:
- TrainingMode.EVAL - 以推理模式导出模型。
- TrainingMode.PRESERVE - 如果model.training为False,则以推理模式导出;否则以训练模式导出。
- TrainingMode.TRAINING - 以训练模式导出,此模式将禁止一些影响训练的优化操作。
- input_names (list of str, default empty list) :按顺序分配给onnx图的输入节点的名称列表。
- output_names (list of str, default empty list) :按顺序分配给onnx图的输出节点的名称列表。
- operator_export_type (enum, default None) :默认为OperatorExportTypes.ONNX, 如果Pytorch built with DPYTORCH_ONNX_CAFFE2_BUNDLE,则默认为OperatorExportTypes.ONNX_ATEN_FALLBACK。枚举类型包括:
- OperatorExportTypes.ONNX - 将所有操作导出为ONNX操作。
- OperatorExportTypes.ONNX_FALLTHROUGH - 试图将所有操作导出为ONNX操作,但碰到无法转换的操作(如onnx未实现的操作),则将操作导出为“自定义操作”,为了使导出的模型可用,运行时必须支持这些自定义操作。支持自定义操作方法见链接。
- OperatorExportTypes.ONNX_ATEN - 所有ATen操作导出为ATen操作,ATen是Pytorch的内建tensor库,所以这将使得模型直接使用Pytorch实现。(此方法转换的模型只能被Caffe2直接使用)
- OperatorExportTypes.ONNX_ATEN_FALLBACK - 试图将所有的ATen操作也转换为ONNX操作,如果无法转换则转换为ATen操作(此方法转换的模型只能被Caffe2直接使用)。例如:
123456789101112131415161718
# 转换前:graph(%0:Float):%3:int=prim::Constant[value=0]()# conversion unsupported%4:Float=aten::triu(%0,%3)# conversion supported%5:Float=aten::mul(%4,%0)return(%5)# 转换后:graph(%0:Float):%1:Long()=onnx::Constant[value={0}]()# not converted%2:Float=aten::ATen[operator="triu"](%0,%1)# converted%3:Float=onnx::Mul(%2,%0)return(%3)
- opset_version (int, default 9) :取值必须等于_onnx_main_opset或在_onnx_stable_opsets之内。具体可在torch/onnx/symbolic_helper.py中找到。例如:
1234
_default_onnx_opset_version=9_onnx_main_opset=13_onnx_stable_opsets=[7,8,9,10,11,12]_export_onnx_opset_version=_default_onnx_opset_version - do_constant_folding (bool, default False) :是否使用“常量折叠”优化。常量折叠将使用一些算好的常量来优化一些输入全为常量的节点。
- example_outputs (T or a tuple of T, where T is Tensor or convertible to Tensor, default None) :当需输入模型为ScriptModule 或 ScriptFunction时必须提供。此参数用于确定输出的类型和形状,而不跟踪(tracing)模型的执行。
- dynamic_axes (dict
- KEY(str) - 必须是input_names或output_names指定的名称,用来指定哪个变量需要使用到动态尺寸。
- VALUE(dict or list) - 如果是一个dict,dict中的key是变量的某个维度,dict中的value是我们给这个维度取的名称。如果是一个list,则list中的元素都表示此变量的某个维度。
代码实现:
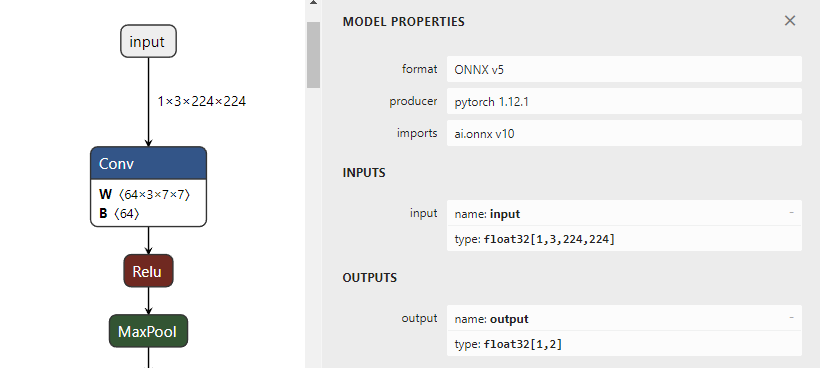
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 | import torchimport torchvisionweight_file = 'googlenet_catdog.pt'onnx_file = 'googlenet_catdog.onnx'model = torchvision.models.googlenet(num_classes=2, init_weights=True)model.load_state_dict(torch.load(weight_file, map_location=torch.device('cpu')))model.eval()# 单输入单输出,固定batchinput = torch.randn(1, 3, 224, 224)input_names = ["input"]output_names = ["output"]torch.onnx.export(model=model, args=input, f=onnx_file, input_names=input_names, output_names=output_names, opset_version=11, verbose=True) |
通过netron.app可视化onnx的输入输出:
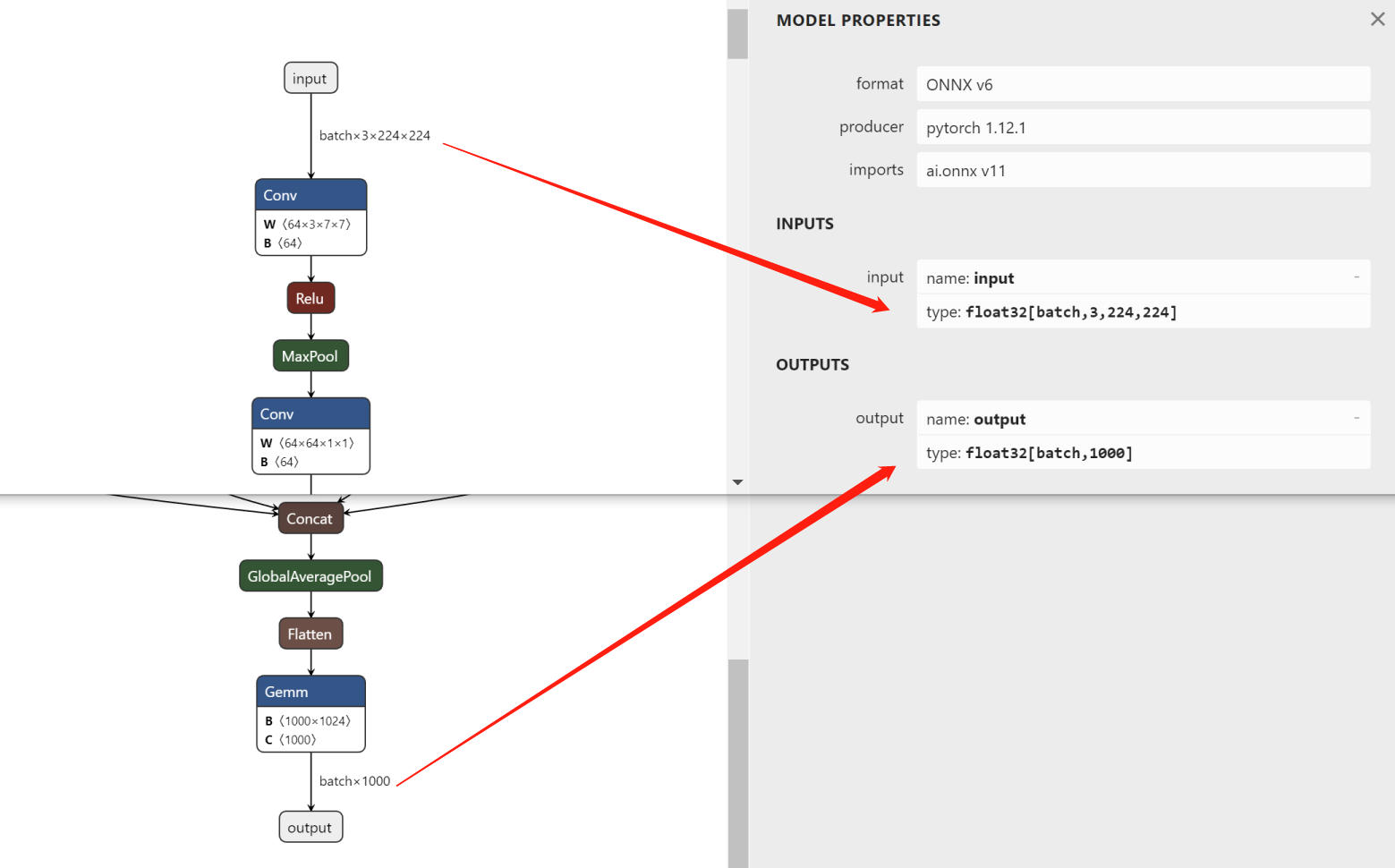
如果需要多张图片同时进行推理,可以通过设置export的dynamic_axes参数,将模型输入输出的指定维度设置为变量。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 | import torchimport torchvisionweight_file = 'googlenet_catdog.pt'onne_file = 'googlenet_catdog.onnx'model = torchvision.models.googlenet(num_classes=2, init_weights=True)model.load_state_dict(torch.load(weight_file, map_location=torch.device('cpu')))model.eval()# 单输入单输出,动态batchinput = torch.randn(1, 3, 224, 224)input_names = ["input"]output_names = ["output"]torch.onnx.export(model=model, args=input, f=onnx_file, input_names=input_names, output_names=output_names, opset_version=11, verbose=True, dynamic_axes={'input': {0: 'batch'}, 'output': {0: 'batch'}}) |
动态batch的onnx文件输入输出在netron.app可视化如下,其中batch维度是变量的形式,可以根据自己需要设置为大于0的任意整数。
如果模型有多个输入和输出,按照以下形式导出:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 | # 模型有两个输入和两个输出,动态batchinput1 = torch.randn(1, 3, 256, 192).to(opt.device)input2 = torch.randn(1, 3, 256, 192).to(opt.device)input_names = ["input1", "input2"]output_names = ["output1", "output2"]torch.onnx.export(model=model, args=(input1, input2), f=opt.onnx_path, input_names=input_names, output_names=output_names, opset_version=16, verbose=True, dynamic_axes={'input1': {0: 'batch'}, 'input2': {0: 'batch'}, 'output1': {0: 'batch'}, 'output2': {0: 'batch'}}) |
3. OpenCV DNN部署GoogLeNet
3.1 推理过程及代码实现
整个推理过程可分为前处理、推理、后处理三部分。具体细节请阅读代码,包括单图推理、动态batch推理的实现。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 | #include #include #include #include using namespace std;using namespace cv;using namespace cv::dnn;std::string onnxPath = "E:/inference-master/models/engine/googlenet-pretrained_batch.onnx";std::string imagePath = "E:/inference-master/images/catdog";std::string classNamesPath = "E:/inference-master/imagenet-classes.txt"; // 标签名称列表(类名)cv::dnn::Net net;std::vector// 标签名,可以从文件读取int batchSize = 32;int softmax(const cv::Mat& src, cv::Mat& dst){ float max = 0.0; float sum = 0.0; max = *max_element(src.begin<float>(), src.end<float>()); cv::exp((src - max), dst); sum = cv::sum(dst)[0]; dst /= sum; return 0;}// GoogLeNet模型初始化void ModelInit(string onnxPath){ net = cv::dnn::readNetFromONNX(onnxPath); // net = cv::dnn::readNetFromCaffe("E:/inference-master/2/deploy.prototxt", "E:/inference-master/2/default.caffemodel"); // 设置计算后台和计算设备 // CPU(默认) // net.setPreferableBackend(cv::dnn::DNN_BACKEND_OPENCV); // net.setPreferableTarget(cv::dnn::DNN_TARGET_CPU); // CUDA net.setPreferableBackend(cv::dnn::DNN_BACKEND_CUDA); net.setPreferableTarget(cv::dnn::DNN_TARGET_CUDA); // 读取标签名称 ifstream fin(classNamesPath.c_str()); string strLine; classNameList.clear(); while (getline(fin, strLine)) classNameList.push_back(strLine); fin.close();}// 单图推理bool ModelInference(cv::Mat srcImage, std::string& className, float& confidence){ auto start = chrono::high_resolution_clock::now(); cv::Mat image = srcImage.clone(); // 预处理(尺寸变换、通道变换、归一化) cv::cvtColor(image, image, cv::COLOR_BGR2RGB); cv::resize(image, image, cv::Size(224, 224)); image.convertTo(image, CV_32FC3, 1.0 / 255.0); cv::Scalar mean(0.485, 0.456, 0.406); cv::Scalar std(0.229, 0.224, 0.225); cv::subtract(image, mean, image); cv::divide(image, std, image); // blobFromImage操作顺序:swapRB交换通道 -> scalefactor比例缩放 -> mean求减 -> size进行resize; // mean操作时,ddepth不能选取CV_8U; // crop=True时,先等比缩放,直到宽高之一率先达到对应的size尺寸,另一个大于或等于对应的size尺寸,然后从中心裁剪; // 返回4-D Mat维度顺序:NCHW // cv::Mat blob = cv::dnn::blobFromImage(image, 1., cv::Size(224, 224), cv::Scalar(0, 0, 0), false, false); cv::Mat blob = cv::dnn::blobFromImage(image); // 设置输入 net.setInput(blob); auto end1 = std::chrono::high_resolution_clock::now(); auto ms1 = std::chrono::duration_cast std::cout << "PreProcess time: " << (ms1 / 1000.0).count() << "ms" << std::endl; // 前向推理 cv::Mat preds = net.forward(); auto end2 = std::chrono::high_resolution_clock::now(); auto ms2 = std::chrono::duration_cast std::cout << "Inference time: " << (ms2 / 1000.0).count() << "ms" << std::endl; // 结果归一化(每个batch分别求softmax) softmax(preds, preds); Point minLoc, maxLoc; double minValue = 0, maxValue = 0; cv::minMaxLoc(preds, &minValue, &maxValue, &minLoc, &maxLoc); int labelIndex = maxLoc.x; double probability = maxValue; className = classNameList[labelIndex]; confidence = probability; // std::cout << "class:" << className << endl << "confidence:" << confidence << endl; auto end3 = std::chrono::high_resolution_clock::now(); auto ms3 = std::chrono::duration_cast std::cout << "PostProcess time: " << (ms3 / 1000.0).count() << "ms" << std::endl; auto ms = chrono::duration_cast std::cout << "opencv_dnn 推理时间:" << (ms / 1000.0).count() << "ms" << std::endl;}// 多图并行推理(动态batch)bool ModelInference_Batch(std::vectorfloat>& confidences){ auto start = chrono::high_resolution_clock::now(); // 预处理(尺寸变换、通道变换、归一化) std::vector for (size_t i = 0; i < srcImages.size(); i++) { cv::Mat image = srcImages[i].clone(); cv::cvtColor(image, image, cv::COLOR_BGR2RGB); cv::resize(image, image, cv::Size(224, 224)); image.convertTo(image, CV_32FC3, 1.0 / 255.0); cv::Scalar mean(0.485, 0.456, 0.406); cv::Scalar std(0.229, 0.224, 0.225); cv::subtract(image, mean, image); cv::divide(image, std, image); images.push_back(image); } cv::Mat blob = cv::dnn::blobFromImages(images); auto end1 = std::chrono::high_resolution_clock::now(); auto ms1 = std::chrono::duration_cast std::cout << "PreProcess time: " << (ms1 / 1000.0).count() << "ms" << std::endl; // 设置输入 net.setInput(blob); // 前向推理 cv::Mat preds = net.forward(); auto end2 = std::chrono::high_resolution_clock::now(); auto ms2 = std::chrono::duration_cast std::cout << "Inference time: " << (ms2 / 1000.0).count() << "ms" << std::endl; int rows = preds.size[0]; // batch int cols = preds.size[1]; // 类别数(每一个类别的得分) for (int row = 0; row < rows; row++) { cv::Mat scores(1, cols, CV_32FC1, preds.ptr<float>(row)); softmax(scores, scores); // 结果归一化 Point minLoc, maxLoc; double minValue = 0, maxValue = 0; cv::minMaxLoc(scores, &minValue, &maxValue, &minLoc, &maxLoc); int labelIndex = maxLoc.x; double probability = maxValue; classNames.push_back(classNameList[labelIndex]); confidences.push_back(probability); } auto end3 = std::chrono::high_resolution_clock::now(); auto ms3 = std::chrono::duration_cast std::cout << "PostProcess time: " << (ms3 / 1000.0).count() << "ms" << std::endl; auto ms = chrono::duration_cast std::cout << "opencv_dnn batch" << rows << " 推理时间:" << (ms / 1000.0).count() << "ms" << std::endl;}int main(int argc, char** argv){ // 模型初始化 ModelInit(onnxPath); // 读取图像 vector glob(imagePath, filenames); // 单图推理测试 for (int n = 0; n < filenames.size(); n++) { // 重复100次,计算平均时间 auto start = chrono::high_resolution_clock::now(); cv::Mat src = imread(filenames[n]); std::string classname; float confidence; for (int i = 0; i < 101; i++) { if (i==1) start = chrono::high_resolution_clock::now(); ModelInference(src, classname, confidence); } auto end = chrono::high_resolution_clock::now(); auto ms = chrono::duration_cast std::cout << "opencv_dnn 平均推理时间:---------------------" << (ms / 1000.0).count() << "ms" << std::endl; } // 批量(动态batch)推理测试 std::vector for (int n = 0; n < filenames.size(); n++) { cv::Mat image = imread(filenames[n]); srcImages.push_back(image); if ((n + 1) % batchSize == 0 || n == filenames.size() - 1) { // 重复100次,计算平均时间 auto start = chrono::high_resolution_clock::now(); for (int i = 0; i < 101; i++) { if (i == 1) start = chrono::high_resolution_clock::now(); std::vector std::vector<float> confidences; ModelInference_Batch(srcImages, classNames, confidences); } srcImages.clear(); auto end = chrono::high_resolution_clock::now(); auto ms = chrono::duration_cast std::cout << "opencv_dnn batch" << batchSize << " 平均推理时间:---------------------" << (ms / 1000.0).count() << "ms" << std::endl; } } return 0;} |
3.2 选择CPU/GPU
OpenCV DNN切换CPU和GPU推理,只需要通过下边两行代码设置计算后台和计算设备。
CPU推理
1 2 | net.setPreferableBackend(cv::dnn::DNN_BACKEND_OPENCV);net.setPreferableTarget(cv::dnn::DNN_TARGET_CPU); |
GPU推理
1 2 | net.setPreferableBackend(cv::dnn::DNN_BACKEND_CUDA);net.setPreferableTarget(cv::dnn::DNN_TARGET_CUDA); |
以下两点需要注意:
- 在不做任何设置的情况下,默认使用CPU进行推理。
- 在设置为GPU推理时,如果电脑没有搜索到CUDA环境,则会自动转换成CPU进行推理。
3.3 多输出模型推理
当模型有多个输出时,使用forward的重载方法,返回Mat类型的数组:
1 2 3 4 5 6 | // 模型多输出std::vectornet.forward(preds);cv::Mat pred1 = preds[0];cv::Mat pred2 = preds[1]; |
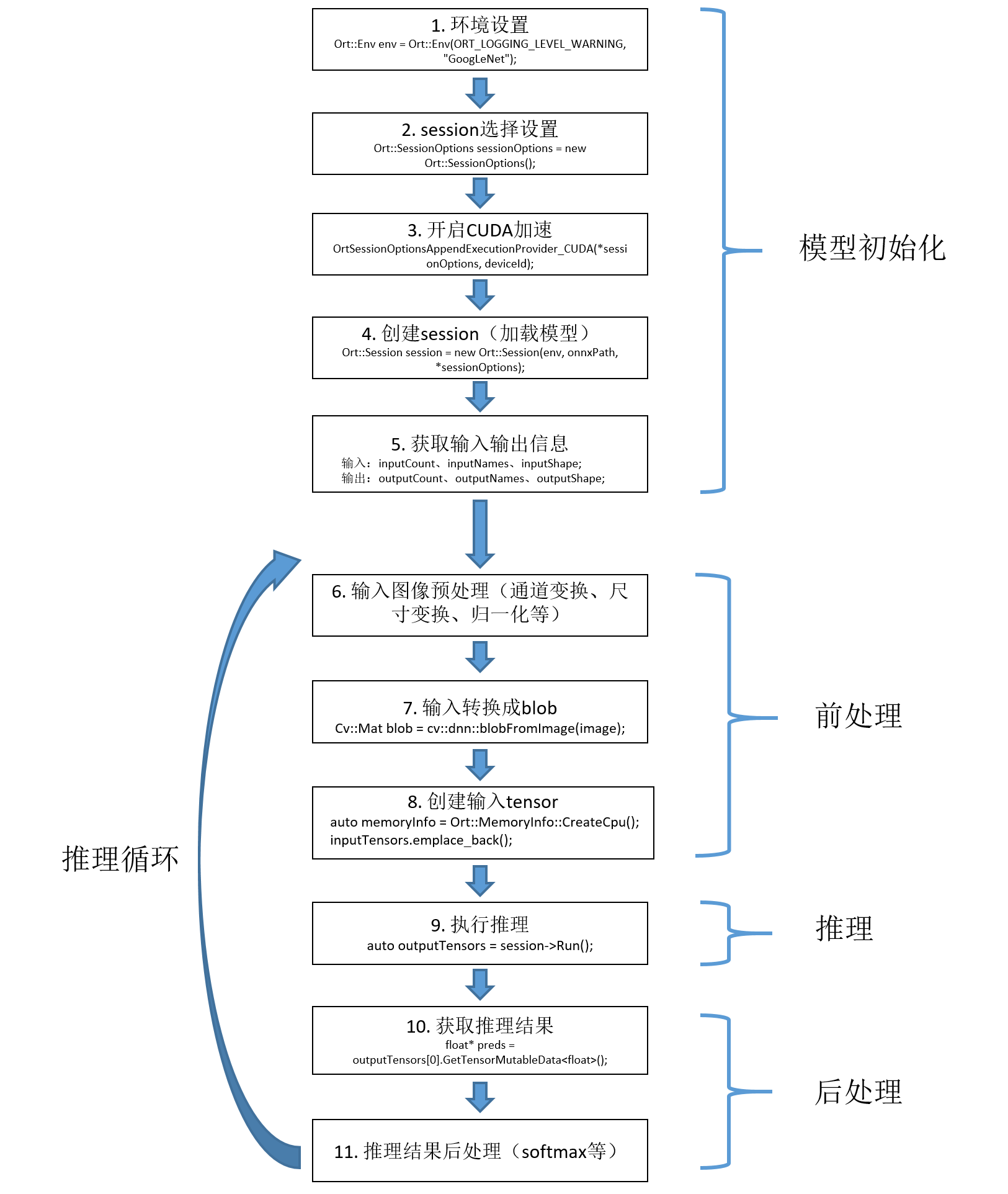
4. ONNXRuntime部署GoogLeNet
4.1 推理过程及代码实现
代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 | #include #include #include #include #include #include using namespace std;using namespace cv;using namespace Ort;// C++表示字符串的方式:char*、string、wchar_t*、wstring、字符串数组const wchar_t* onnxPath = L"E:/inference-master/models/GoogLeNet/googlenet-pretrained_batch1.onnx";std::string imagePath = "E:/inference-master/images/catdog";std::string classNamesPath = "E:/inference-master/imagenet-classes.txt"; // 标签名称列表(类名)std::vector// 标签名,可以从文件读取int batchSize = 1;Ort::Env env{ nullptr };Ort::SessionOptions* sessionOptions;Ort::Session* session;size_t inputCount;size_t outputCount;std::vector<const char*> inputNames;std::vector<const char*> outputNames;std::vectorstd::vector// 对数组元素求softmaxstd::vector<float> softmax(std::vector<float> input){ float total = 0; for (auto x : input) total += exp(x); std::vector<float> result; for (auto x : input) result.push_back(exp(x) / total); return result;}int softmax(const cv::Mat& src, cv::Mat& dst){ float max = 0.0; float sum = 0.0; max = *max_element(src.begin<float>(), src.end<float>()); cv::exp((src - max), dst); sum = cv::sum(dst)[0]; dst /= sum; return 0;}// 前(预)处理(通道变换、标准化等)void PreProcess(cv::Mat srcImage, cv::Mat& dstImage){ // 通道变换,BGR->RGB cvtColor(srcImage, dstImage, cv::COLOR_BGR2RGB); resize(dstImage, dstImage, Size(224, 224)); // 图像归一化 dstImage.convertTo(dstImage, CV_32FC3, 1.0 / 255.0); cv::Scalar mean(0.485, 0.456, 0.406); cv::Scalar std(0.229, 0.224, 0.225); subtract(dstImage, mean, dstImage); divide(dstImage, std, dstImage);}// 模型初始化int ModelInit(const wchar_t* onnxPath, bool useCuda, int deviceId){ // 读取标签名称 std::ifstream fin(classNamesPath.c_str()); std::string strLine; classNameList.clear(); while (getline(fin, strLine)) classNameList.push_back(strLine); fin.close(); // 环境设置,控制台输出设置 env = Ort::Env(ORT_LOGGING_LEVEL_WARNING, "GoogLeNet"); sessionOptions = new Ort::SessionOptions(); // 设置线程数 sessionOptions->SetIntraOpNumThreads(16); // 优化等级:启用所有可能的优化 sessionOptions->SetGraphOptimizationLevel(GraphOptimizationLevel::ORT_ENABLE_ALL); if (useCuda) { // 开启CUDA加速,需要cuda_provider_factory.h头文件 OrtSessionOptionsAppendExecutionProvider_CUDA(*sessionOptions, deviceId); } // 创建session session = new Ort::Session(env, onnxPath, *sessionOptions); // 获取输入输出数量 inputCount = session->GetInputCount(); outputCount = session->GetOutputCount(); std::cout << "Number of inputs = " << inputCount << std::endl; std::cout << "Number of outputs = " << outputCount << std::endl; // 获取输入输出名称 Ort::AllocatorWithDefaultOptions allocator; const char* inputName = session->GetInputName(0, allocator); const char* outputName = session->GetOutputName(0, allocator); inputNames = { inputName }; outputNames = { outputName }; std::cout << "Name of inputs = " << inputName << std::endl; std::cout << "Name of outputs = " << outputName << std::endl; // 获取输入输出维度信息,返回类型std::vector inputShape = session->GetInputTypeInfo(0).GetTensorTypeAndShapeInfo().GetShape(); outputShape = session->GetOutputTypeInfo(0).GetTensorTypeAndShapeInfo().GetShape(); std::cout << "Shape of inputs = " << "(" << inputShape[0] << "," << inputShape[1] << "," << inputShape[2] << "," << inputShape[3] << ")" << std::endl; std::cout << "Shape of outputs = " << "(" << outputShape[0] << "," << outputShape[1] << ")" << std::endl; return 0;}// 单图推理void ModelInference(cv::Mat srcImage, std::string& className, float& confidence){ auto start = chrono::high_resolution_clock::now(); // 输入图像预处理 cv::Mat image; //PreProcess(srcImage, image); // 这里使用调用函数的方式,处理时间莫名变长很多,很奇怪 // 通道变换,BGR->RGB cvtColor(srcImage, image, cv::COLOR_BGR2RGB); resize(image, image, Size(224, 224)); // 图像归一化 image.convertTo(image, CV_32FC3, 1.0 / 255.0); cv::Scalar mean(0.485, 0.456, 0.406); cv::Scalar std(0.229, 0.224, 0.225); subtract(image, mean, image); divide(image, std, image); cv::Mat blob = cv::dnn::blobFromImage(image); auto end1 = std::chrono::high_resolution_clock::now(); auto ms1 = std::chrono::duration_cast std::cout << "PreProcess time: " << (ms1 / 1000.0).count() << "ms" << std::endl; // 创建输入tensor auto memoryInfo = Ort::MemoryInfo::CreateCpu(OrtAllocatorType::OrtArenaAllocator, OrtMemType::OrtMemTypeDefault); std::vector inputTensors.emplace_back(Ort::Value::CreateTensor<float>(memoryInfo, blob.ptr<float>(), blob.total(), inputShape.data(), inputShape.size())); // 推理 auto outputTensors = session->Run(Ort::RunOptions{ nullptr }, inputNames.data(), inputTensors.data(), inputCount, outputNames.data(), outputCount); auto end2 = std::chrono::high_resolution_clock::now(); auto ms2 = std::chrono::duration_cast std::cout << "Inference time: " << (ms2 / 1000.0).count() << "ms" << std::endl; // 获取输出 float* preds = outputTensors[0].GetTensorMutableData<float>(); // 也可以使用outputTensors.front(); int64_t numClasses = outputShape[1]; cv::Mat output = cv::Mat_<float>(1, numClasses); for (int j = 0; j < numClasses; j++) { output.at<float>(0, j) = preds[j]; } Point minLoc, maxLoc; double minValue = 0, maxValue = 0; cv::minMaxLoc(output, &minValue, &maxValue, &minLoc, &maxLoc); int labelIndex = maxLoc.x; double probability = maxValue; className = classNameList[1]; confidence = probability; auto end3 = std::chrono::high_resolution_clock::now(); auto ms3 = std::chrono::duration_cast std::cout << "PostProcess time: " << (ms3 / 1000.0).count() << "ms" << std::endl; auto ms = chrono::duration_cast std::cout << "onnxruntime单图推理时间:" << (ms / 1000.0).count() << "ms" << std::endl;}// 单图推理void ModelInference_Batch(std::vectorfloat>& confidences){ auto start = chrono::high_resolution_clock::now(); // 输入图像预处理 std::vector for (size_t i = 0; i < srcImages.size(); i++) { cv::Mat image = srcImages[i].clone(); // 通道变换,BGR->RGB cvtColor(image, image, cv::COLOR_BGR2RGB); resize(image, image, Size(224, 224)); // 图像归一化 image.convertTo(image, CV_32FC3, 1.0 / 255.0); cv::Scalar mean(0.485, 0.456, 0.406); cv::Scalar std(0.229, 0.224, 0.225); subtract(image, mean, image); divide(image, std, image); images.push_back(image); } // 图像转blob格式 cv::Mat blob = cv::dnn::blobFromImages(images); auto end1 = std::chrono::high_resolution_clock::now(); auto ms1 = std::chrono::duration_cast std::cout << "PreProcess time: " << (ms1 / 1000.0).count() << "ms" << std::endl; // 创建输入tensor std::vector auto memoryInfo = Ort::MemoryInfo::CreateCpu(OrtAllocatorType::OrtArenaAllocator, OrtMemType::OrtMemTypeDefault); inputTensors.emplace_back(Ort::Value::CreateTensor<float>(memoryInfo, blob.ptr<float>(), blob.total(), inputShape.data(), inputShape.size())); // 推理 std::vectornullptr }, inputNames.data(), inputTensors.data(), inputCount, outputNames.data(), outputCount); auto end2 = std::chrono::high_resolution_clock::now(); auto ms2 = std::chrono::duration_cast std::cout << "inference time: " << (ms2 / 1000.0).count() << "ms" << std::endl; // 获取输出 float* preds = outputTensors[0].GetTensorMutableData<float>(); // 也可以使用outputTensors.front(); // cout << preds[0] << "," << preds[1] << "," << preds[1000] << "," << preds[1001] << endl; int batch = outputShape[0]; int numClasses = outputShape[1]; cv::Mat output(batch, numClasses, CV_32FC1, preds); int rows = output.size[0]; // batch int cols = output.size[1]; // 类别数(每一个类别的得分) for (int row = 0; row < rows; row++) { cv::Mat scores(1, cols, CV_32FC1, output.ptr<float>(row)); softmax(scores, scores); // 结果归一化 Point minLoc, maxLoc; double minValue = 0, maxValue = 0; cv::minMaxLoc(scores, &minValue, &maxValue, &minLoc, &maxLoc); int labelIndex = maxLoc.x; double probability = maxValue; classNames.push_back(classNameList[labelIndex]); confidences.push_back(probability); } auto end3 = std::chrono::high_resolution_clock::now(); auto ms3 = std::chrono::duration_cast std::cout << "PostProcess time: " << (ms3 / 1000.0).count() << "ms" << std::endl; auto ms = chrono::duration_cast std::cout << "onnxruntime单图推理时间:" << (ms / 1000.0).count() << "ms" << std::endl;}int main(int argc, char** argv){ // 模型初始化 ModelInit(onnxPath, true, 0); // 读取图像 std::vector cv::glob(imagePath, filenames); // 单图推理测试 for (int i = 0; i < filenames.size(); i++) { // 每张图重复运行100次,计算平均时间 auto start = chrono::high_resolution_clock::now(); cv::Mat srcImage = imread(filenames[i]); std::string className; float confidence; for (int n = 0; n < 101; n++) { if (n == 1) start = chrono::high_resolution_clock::now(); ModelInference(srcImage, className, confidence); } // 显示 cv::putText(srcImage, className + ":" + std::to_string(confidence), cv::Point(10, 20), FONT_HERSHEY_SIMPLEX, 0.6, cv::Scalar(0, 0, 255), 1, 1); auto end = chrono::high_resolution_clock::now(); auto ms = chrono::duration_cast std::cout << "onnxruntime 平均推理时间:---------------------" << (ms / 1000.0).count() << "ms" << std::endl; } // 批量推理测试 std::vector for (int i = 0; i < filenames.size(); i++) { cv::Mat image = imread(filenames[i]); srcImages.push_back(image); if ((i + 1) % batchSize == 0 || i == filenames.size() - 1) { // 重复100次,计算平均时间 auto start = chrono::high_resolution_clock::now(); for (int n = 0; n < 101; n++) { if (n == 1) start = chrono::high_resolution_clock::now(); // 首次推理耗时很久 std::vector std::vector<float> confidences; ModelInference_Batch(srcImages, classNames, confidences); } srcImages.clear(); auto end = chrono::high_resolution_clock::now(); auto ms = chrono::duration_cast std::cout << "onnxruntime batch" << batchSize << " 平均推理时间:---------------------" << (ms / 1000.0).count() << "ms" << std::endl; } } return 0;} |
注意:ORT支持多图并行推理,但是要求转出onnx的时候batch就要使用固定数值。动态batch(即batch=-1)的onnx文件是不支持推理的。
4.2 选择CPU/GPU
使用GPU推理,只需要添加一行代码:
1 2 3 4 | if (useCuda) { // 开启CUDA加速 OrtSessionOptionsAppendExecutionProvider_CUDA(*sessionOptions, deviceId);} |
4.3 多输入多输出模型推理
推理步骤和单图推理基本一致,需要在输入tensor中依次添加所有的输入。假设模型有两个输入和两个输出:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 | // 创建sessionsession2 = new Ort::Session(env1, onnxPath, sessionOptions1);// 获取模型输入输出信息inputCount2 = session2->GetInputCount();outputCount2 = session2->GetOutputCount();// 输入和输出各有两个Ort::AllocatorWithDefaultOptions allocator;const char* inputName1 = session2->GetInputName(0, allocator);const char* inputName2 = session2->GetInputName(1, allocator);const char* outputName1 = session2->GetOutputName(0, allocator);const char* outputName2 = session2->GetOutputName(1, allocator);intputNames2 = { inputName1, inputName2 };outputNames2 = { outputName1, outputName2 };// 获取输入输出维度信息,返回类型std::vectorinputShape2_1 = session2->GetInputTypeInfo(0).GetTensorTypeAndShapeInfo().GetShape();inputShape2_2 = session2->GetInputTypeInfo(1).GetTensorTypeAndShapeInfo().GetShape();outputShape2_1 = session2->GetOutputTypeInfo(0).GetTensorTypeAndShapeInfo().GetShape();outputShape2_2 = session2->GetOutputTypeInfo(1).GetTensorTypeAndShapeInfo().GetShape();...// 创建输入tensorauto memoryInfo = Ort::MemoryInfo::CreateCpu(OrtAllocatorType::OrtArenaAllocator, OrtMemType::OrtMemTypeDefault);std::vectorinputTensors.emplace_back(Ort::Value::CreateTensor<float>(memoryInfo, blob1.ptr<float>(), blob1.total(), inputShape2_1.data(), inputShape2_1.size()));inputTensors.emplace_back(Ort::Value::CreateTensor<float>(memoryInfo, blob2.ptr<float>(), blob2.total(), inputShape2_2.data(), inputShape2_2.size())); // 推理auto outputTensors = session2->Run(Ort::RunOptions{ nullptr }, intputNames2.data(), inputTensors.data(), inputCount2, outputNames2.data(), outputCount2);// 获取输出float* preds1 = outputTensors[0].GetTensorMutableData<float>();float* preds2 = outputTensors[1].GetTensorMutableData<float>(); |
5. TensorRT部署GoogLeNet
TRT推理有两种常见的方式:
- 通过官方安装包里边的提供的trtexec.exe工具,从onnx文件转换得到trt文件,然后执行推理;
- 由onnx文件转化得到engine文件,再执行推理。
两种方式原理一样,这里我们只介绍第二种方式。推理过程可分为两阶段:使用onnx构建推理engine和加载engine执行推理。
5.1 构建推理引擎(engine文件)
engine的构建是TensorRT推理至关重要的一步,它特定于所构建的确切GPU模型,不能跨平台或TensorRT版本移植。举个简单的例子,如果你在RTX3060上使用TensorRT 8.2.5构建了engine,那么推理部署也必须要在RTX3060上进行,且要具备TensorRT 8.2.5环境。engine构建的大致流程如下:
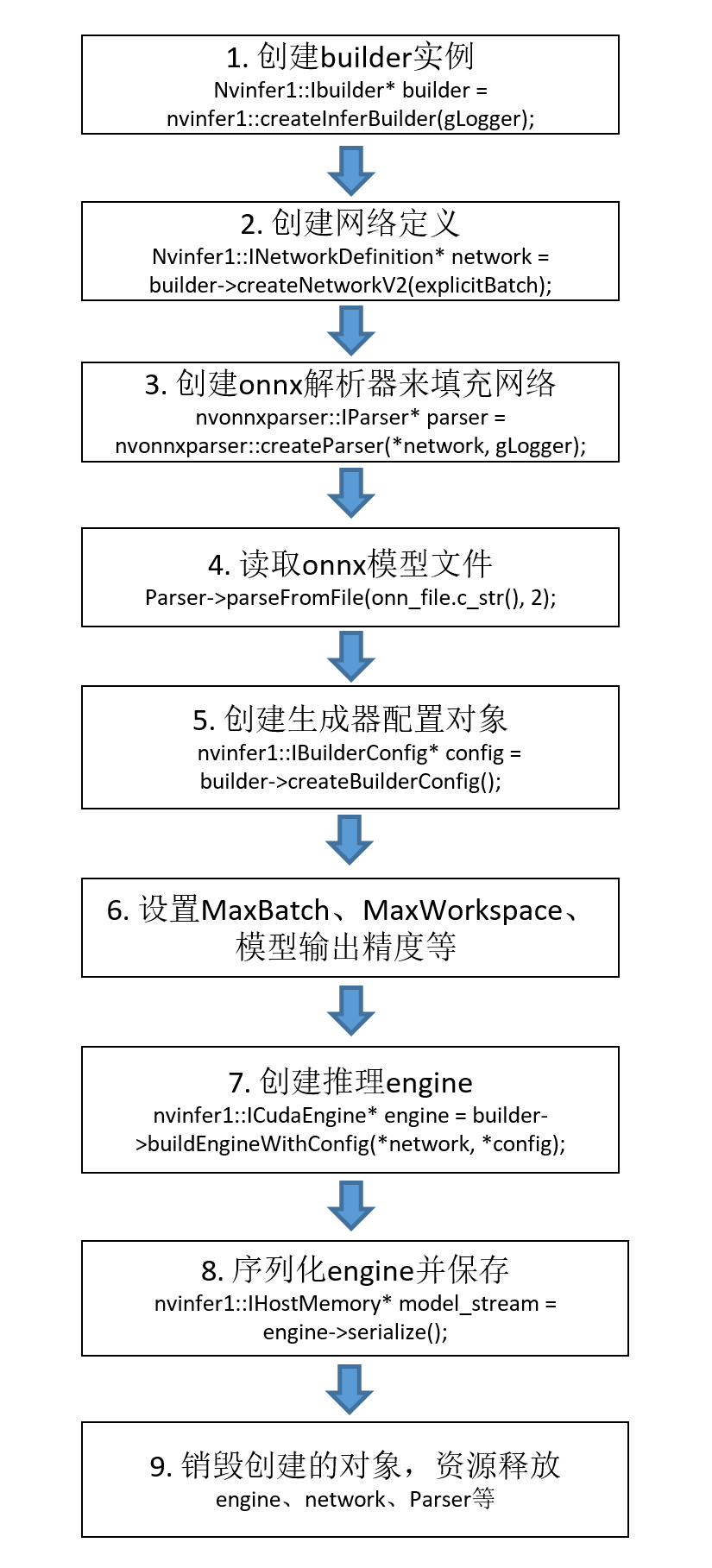
engine的构建有很多种方式,这里我们介绍常用的三种。我一般会选择直接在Python中构建,这样模型的训练、转onnx、转engine都在Python端完成,方便且省事。
方法一:在Python中构建
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 | import osimport sysimport loggingimport argparseimport tensorrt as trtos.environ['CUDA_VISIBLE_DEVICES'] = '0'# 延迟加载模式,cuda11.7新功能,设置为LAZY有可能会极大的降低内存和显存的占用os.environ['CUDA_MODULE_LOADING'] = 'LAZY'logging.basicConfig(level=logging.INFO)logging.getLogger("EngineBuilder").setLevel(logging.INFO)log = logging.getLogger("EngineBuilder")class EngineBuilder: """ Parses an ONNX graph and builds a TensorRT engine from it. """ def __init__(self, batch_size=1, verbose=False, workspace=8): """ :param verbose: If enabled, a higher verbosity level will be set on the TensorRT logger. :param workspace: Max memory workspace to allow, in Gb. """ # 1. 构建builder self.trt_logger = trt.Logger(trt.Logger.INFO) if verbose: self.trt_logger.min_severity = trt.Logger.Severity.VERBOSE trt.init_libnvinfer_plugins(self.trt_logger, namespace="") self.builder = trt.Builder(self.trt_logger) self.config = self.builder.create_builder_config() # 构造builder.config self.config.max_workspace_size = workspace * (2 ** 30) # workspace分配 self.batch_size = batch_size self.network = None self.parser = None def create_network(self, onnx_path): """ Parse the ONNX graph and create the corresponding TensorRT network definition. :param onnx_path: The path to the ONNX graph to load. """ network_flags = (1 << int(trt.NetworkDefinitionCreationFlag.EXPLICIT_BATCH)) self.network = self.builder.create_network(network_flags) self.parser = trt.OnnxParser(self.network, self.trt_logger) onnx_path = os.path.realpath(onnx_path) with open(onnx_path, "rb") as f: if not self.parser.parse(f.read()): log.error("Failed to load ONNX file: {}".format(onnx_path)) for error in range(self.parser.num_errors): log.error(self.parser.get_error(error)) sys.exit(1) # 获取网络输入输出 inputs = [self.network.get_input(i) for i in range(self.network.num_inputs)] outputs = [self.network.get_output(i) for i in range(self.network.num_outputs)] log.info("Network Description") for input in inputs: self.batch_size = input.shape[0] log.info("Input '{}' with shape {} and dtype {}".format(input.name, input.shape, input.dtype)) for output in outputs: log.info("Output '{}' with shape {} and dtype {}".format(output.name, output.shape, output.dtype)) assert self.batch_size > 0 self.builder.max_batch_size = self.batch_size def create_engine(self, engine_path, precision): """ Build the TensorRT engine and serialize it to disk. :param engine_path: The path where to serialize the engine to. :param precision: The datatype to use for the engine, either 'fp32', 'fp16' or 'int8'. """ engine_path = os.path.realpath(engine_path) engine_dir = os.path.dirname(engine_path) os.makedirs(engine_dir, exist_ok=True) log.info("Building {} Engine in {}".format(precision, engine_path)) inputs = [self.network.get_input(i) for i in range(self.network.num_inputs)] if precision == "fp16": if not self.builder.platform_has_fast_fp16: log.warning("FP16 is not supported natively on this platform/device") else: self.config.set_flag(trt.BuilderFlag.FP16) with self.builder.build_engine(self.network, self.config) as engine, open(engine_path, "wb") as f: log.info("Serializing engine to file: {:}".format(engine_path)) f.write(engine.serialize())def main(args): builder = EngineBuilder(args.batch_size, args.verbose, args.workspace) builder.create_network(args.onnx) builder.create_engine(args.engine, args.precision)if __name__ == "__main__": parser = argparse.ArgumentParser() parser.add_argument("-o", "--onnx", default=r'googlenet-pretrained_batch8.onnx', help="The input ONNX model file to load") parser.add_argument("-e", "--engine", default=r'googlenet-pretrained_batch8_from_py_3080_FP16.engine', help="The output path for the TRT engine") parser.add_argument("-p", "--precision", default="fp16", choices=["fp32", "fp16", "int8"], help="The precision mode to build in, either 'fp32', 'fp16' or 'int8', default: 'fp16'") parser.add_argument("-b", "--batch_size", default=8, type=int, help="batch number of input") parser.add_argument("-v", "--verbose", action="store_true", help="Enable more verbose log output") parser.add_argument("-w", "--workspace", default=8, type=int, help="The max memory workspace size to allow in Gb, " "default: 8") args = parser.parse_args() main(args) |
生成fp16模型:参数precision设置为fp16即可。int8模型生成过程比较复杂,且对模型精度影响较大,用的不多,这里暂不介绍。
1 2 | parser.add_argument("-p", "--precision", default="fp16", choices=["fp32", "fp16", "int8"], help="The precision mode to build in, either 'fp32', 'fp16' or 'int8', default: 'fp16'") |
方法二:在C++中构建
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 | #include "NvInfer.h"#include "NvOnnxParser.h"#include "cuda_runtime_api.h"#include "logging.h"#include #include #include #include #include #include using namespace nvinfer1;using namespace nvonnxparser;using namespace std;using namespace cv;std::string onnxPath = "E:/inference-master/models/engine/googlenet-pretrained_batch.onnx";std::string enginePath = "E:/inference-master/models/engine/googlenet-pretrained_batch_from_cpp.engine"; // 通过C++构建static const int INPUT_H = 224;static const int INPUT_W = 224;static const int OUTPUT_SIZE = 1000;static const int BATCH_SIZE = 25;const char* INPUT_BLOB_NAME = "input";const char* OUTPUT_BLOB_NAME = "output";static Logger gLogger;// onnx转enginevoid onnx_to_engine(std::string onnx_file_path, std::string engine_file_path, int type) { // 创建builder实例,获取cuda内核目录以获取最快的实现,用于创建config、network、engine的其他对象的核心类 nvinfer1::IBuilder* builder = nvinfer1::createInferBuilder(gLogger); const auto explicitBatch = 1U << static_cast // 创建网络定义 nvinfer1::INetworkDefinition* network = builder->createNetworkV2(explicitBatch); // 创建onnx解析器来填充网络 nvonnxparser::IParser* parser = nvonnxparser::createParser(*network, gLogger); // 读取onnx模型文件 parser->parseFromFile(onnx_file_path.c_str(), 2); for (int i = 0; i < parser->getNbErrors(); ++i) { std::cout << "load error: " << parser->getError(i)->desc() << std::endl; } printf("tensorRT load mask onnx model successfully!!!...\n"); // 创建生成器配置对象 nvinfer1::IBuilderConfig* config = builder->createBuilderConfig(); builder->setMaxBatchSize(BATCH_SIZE); // 设置最大batch config->setMaxWorkspaceSize(16 * (1 << 20)); // 设置最大工作空间大小 // 设置模型输出精度,0代表FP32,1代表FP16 if (type == 1) { config->setFlag(nvinfer1::BuilderFlag::kFP16); } // 创建推理引擎 nvinfer1::ICudaEngine* engine = builder->buildEngineWithConfig(*network, *config); // 将推理引擎保存到本地 std::cout << "try to save engine file now~~~" << std::endl; std::ofstream file_ptr(engine_file_path, std::ios::binary); if (!file_ptr) { std::cerr << "could not open plan output file" << std::endl; return; } // 将模型转化为文件流数据 nvinfer1::IHostMemory* model_stream = engine->serialize(); // 将文件保存到本地 file_ptr.write(reinterpret_cast<const char*>(model_stream->data()), model_stream->size()); // 销毁创建的对象 model_stream->destroy(); engine->destroy(); network->destroy(); parser->destroy(); std::cout << "convert onnx model to TensorRT engine model successfully!" << std::endl;}int main(int argc, char** argv){ // onnx转engine onnx_to_engine(onnxPath, enginePath, 0); return 0;} |
方法三:使用官方安装包bin目录下的trtexec.exe工具构建
1 | trtexec.exe --onnx=googlenet-pretrained_batch.onnx --saveEngine=googlenet-pretrained_batch_from_trt_trt853.engine --shapes=input:25x3x224x224 |
fp16模型:在后边加--fp16即可
1 | trtexec.exe --onnx=googlenet-pretrained_batch.onnx --saveEngine=googlenet-pretrained_batch_from_trt_trt853.engine --shapes=input:25x3x224x224 --fp16 |
5.2 读取engine文件并部署模型
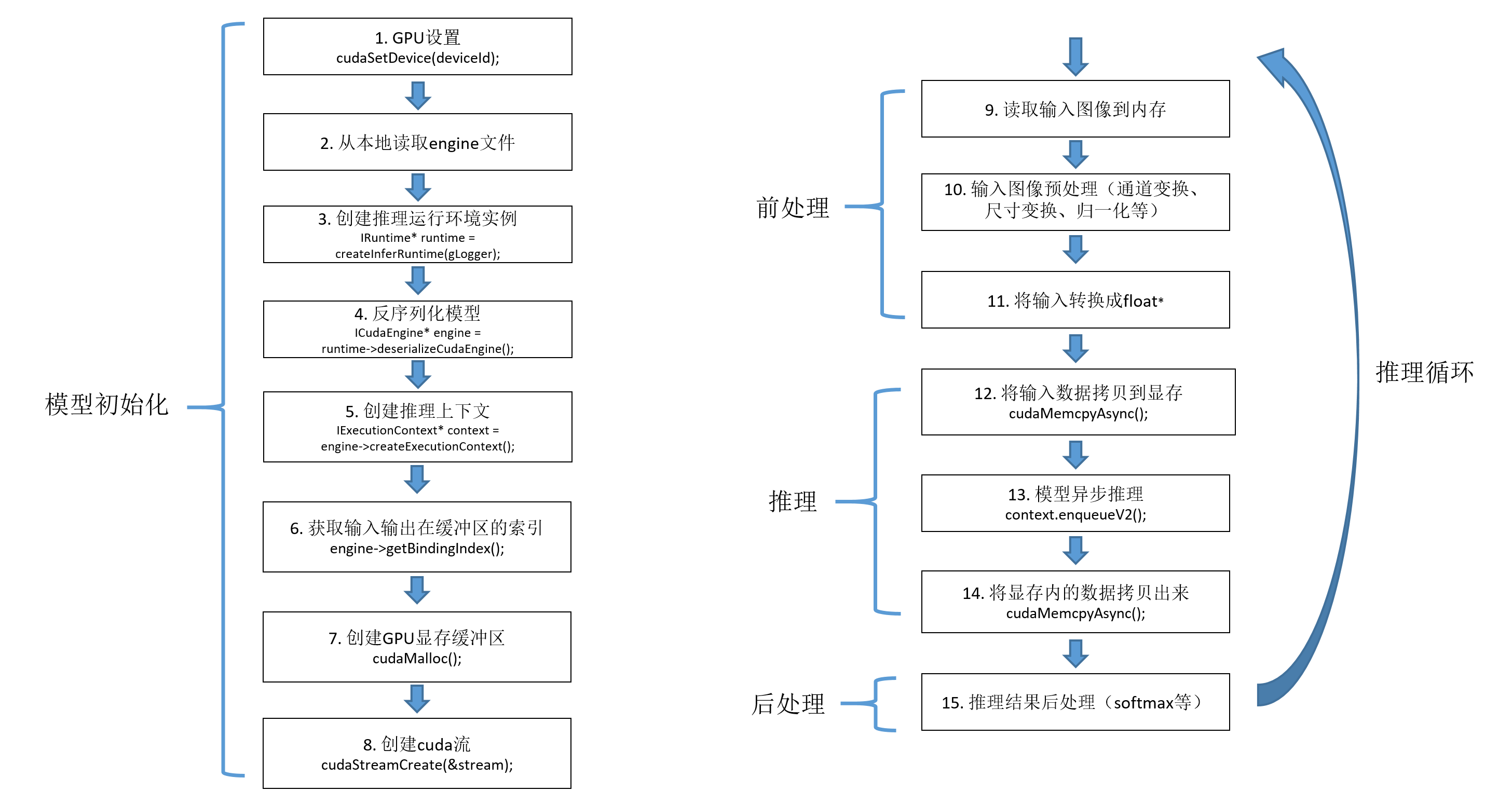
推理代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 | #include "NvInfer.h"#include "NvOnnxParser.h"#include "cuda_runtime_api.h"#include "logging.h"#include #include #include #include #include #include "cuda.h"#include "assert.h"#include "iostream"using namespace nvinfer1;using namespace nvonnxparser;using namespace std;using namespace cv;#define CHECK(status) \ do\ {\ auto ret = (status);\ if (ret != 0)\ {\ std::cerr << "Cuda failure: " << ret << std::endl;\ abort();\ }\ } while (0)std::string enginePath = "E:/inference-master/models/GoogLeNet/googlenet-pretrained_batch1_from_py_3080_FP32.engine";std::string imagePath = "E:/inference-master/images/catdog";std::string classNamesPath = "E:/inference-master/imagenet-classes.txt"; // 标签名称列表(类名)std::vector// 标签名列表static const int INPUT_H = 224;static const int INPUT_W = 224;static const int CHANNEL = 3;static const int OUTPUT_SIZE = 1000;static const int BATCH_SIZE = 1;const char* INPUT_BLOB_NAME = "input";const char* OUTPUT_BLOB_NAME = "output";static Logger gLogger;IRuntime* runtime;ICudaEngine* engine;IExecutionContext* context;void* gpu_buffers[2];cudaStream_t stream;const int inputIndex = 0;const int outputIndex = 1;// 提前申请内存,可节省推理时间static float mydata[BATCH_SIZE * CHANNEL * INPUT_H * INPUT_W];static float prob[BATCH_SIZE * OUTPUT_SIZE];// 逐行求softmaxint softmax(const cv::Mat & src, cv::Mat & dst){ float max = 0.0; float sum = 0.0; cv::Mat tmpdst = cv::Mat::zeros(src.size(), src.type()); std::vector // 逐行求softmax for (size_t i = 0; i < src.rows; i++) { cv::Mat tmpRow; cv::Mat dataRow = src.row(i).clone(); max = *std::max_element(dataRow.begin<float>(), dataRow.end<float>()); cv::exp((dataRow - max), tmpRow); sum = cv::sum(tmpRow)[0]; tmpRow /= sum; srcRows.push_back(tmpRow); cv::vconcat(srcRows, tmpdst); } dst = tmpdst.clone(); return 0;}// onnx转enginevoid onnx_to_engine(std::string onnx_file_path, std::string engine_file_path, int type) { // 创建builder实例,获取cuda内核目录以获取最快的实现,用于创建config、network、engine的其他对象的核心类 nvinfer1::IBuilder* builder = nvinfer1::createInferBuilder(gLogger); const auto explicitBatch = 1U << static_cast // 创建网络定义 nvinfer1::INetworkDefinition* network = builder->createNetworkV2(explicitBatch); // 创建onnx解析器来填充网络 nvonnxparser::IParser* parser = nvonnxparser::createParser(*network, gLogger); // 读取onnx模型文件 parser->parseFromFile(onnx_file_path.c_str(), 2); for (int i = 0; i < parser->getNbErrors(); ++i) { std::cout << "load error: " << parser->getError(i)->desc() << std::endl; } printf("tensorRT load mask onnx model successfully!!!...\n"); // 创建生成器配置对象 nvinfer1::IBuilderConfig* config = builder->createBuilderConfig(); builder->setMaxBatchSize(BATCH_SIZE); // 设置最大batch config->setMaxWorkspaceSize(16 * (1 << 20)); // 设置最大工作空间大小 // 设置模型输出精度 if (type == 1) { config->setFlag(nvinfer1::BuilderFlag::kFP16); } if (type == 2) { config->setFlag(nvinfer1::BuilderFlag::kINT8); } // 创建推理引擎 nvinfer1::ICudaEngine* engine = builder->buildEngineWithConfig(*network, *config); // 将推理引擎保存到本地 std::cout << "try to save engine file now~~~" << std::endl; std::ofstream file_ptr(engine_file_path, std::ios::binary); if (!file_ptr) { std::cerr << "could not open plan output file" << std::endl; return; } // 将模型转化为文件流数据 nvinfer1::IHostMemory* model_stream = engine->serialize(); // 将文件保存到本地 file_ptr.write(reinterpret_cast<const char*>(model_stream->data()), model_stream->size()); // 销毁创建的对象 model_stream->destroy(); engine->destroy(); network->destroy(); parser->destroy(); std::cout << "convert onnx model to TensorRT engine model successfully!" << std::endl;}// 模型推理:包括创建GPU显存缓冲区、配置模型输入及模型推理void doInference(IExecutionContext& context, const void* input, float* output, int batchSize){ //auto start = chrono::high_resolution_clock::now(); // DMA input batch data to device, infer on the batch asynchronously, and DMA output back to host CHECK(cudaMemcpyAsync(gpu_buffers[inputIndex], input, batchSize * 3 * INPUT_H * INPUT_W * sizeof(float), cudaMemcpyHostToDevice, stream)); // context.enqueue(batchSize, buffers, stream, nullptr); context.enqueueV2(gpu_buffers, stream, nullptr); //auto end1 = std::chrono::high_resolution_clock::now(); //auto ms1 = std::chrono::duration_cast //std::cout << "推理: " << (ms1 / 1000.0).count() << "ms" << std::endl; CHECK(cudaMemcpyAsync(output, gpu_buffers[outputIndex], batchSize * OUTPUT_SIZE * sizeof(float), cudaMemcpyDeviceToHost, stream)); //size_t dest_pitch = 0; //CHECK(cudaMemcpy2D(output, dest_pitch, buffers[outputIndex], batchSize * sizeof(float), batchSize, OUTPUT_SIZE, cudaMemcpyDeviceToHost)); cudaStreamSynchronize(stream); //auto end2 = std::chrono::high_resolution_clock::now(); //auto ms2 = std::chrono::duration_cast //std::cout << "cuda-host: " << (ms2 / 1000.0).count() << "ms" << std::endl;}// 结束推理,释放资源void GpuMemoryRelease(){ // Release stream and buffers cudaStreamDestroy(stream); CHECK(cudaFree(gpu_buffers[0])); CHECK(cudaFree(gpu_buffers[1])); // Destroy the engine context->destroy(); engine->destroy(); runtime->destroy();}// GoogLeNet模型初始化void ModelInit(std::string enginePath, int deviceId){ // 设置GPU cudaSetDevice(deviceId); // 从本地读取engine模型文件 char* trtModelStream{ nullptr }; size_t size{ 0 }; std::ifstream file(enginePath, std::ios::binary); if (file.good()) { file.seekg(0, file.end); // 将读指针从文件末尾开始移动0个字节 size = file.tellg(); // 返回读指针的位置,此时读指针的位置就是文件的字节数 file.seekg(0, file.beg); // 将读指针从文件开头开始移动0个字节 trtModelStream = new char[size]; assert(trtModelStream); file.read(trtModelStream, size); file.close(); } // 创建推理运行环境实例 runtime = createInferRuntime(gLogger); assert(runtime != nullptr); // 反序列化模型 engine = runtime->deserializeCudaEngine(trtModelStream, size, nullptr); assert(engine != nullptr); // 创建推理上下文 context = engine->createExecutionContext(); assert(context != nullptr); delete[] trtModelStream; // Create stream CHECK(cudaStreamCreate(&stream)); // Pointers to input and output device buffers to pass to engine. // Engine requires exactly IEngine::getNbBindings() number of buffers. assert(engine.getNbBindings() == 2); // In order to bind the buffers, we need to know the names of the input and output tensors. // Note that indices are guaranteed to be less than IEngine::getNbBindings() const int inputIndex = engine->getBindingIndex(INPUT_BLOB_NAME); const int outputIndex = engine->getBindingIndex(OUTPUT_BLOB_NAME); // Create GPU buffers on device CHECK(cudaMalloc(&gpu_buffers[inputIndex], BATCH_SIZE * 3 * INPUT_H * INPUT_W * sizeof(float))); CHECK(cudaMalloc(&gpu_buffers[outputIndex], BATCH_SIZE * OUTPUT_SIZE * sizeof(float))); // 读取标签名称 ifstream fin(classNamesPath.c_str()); string strLine; classNameList.clear(); while (getline(fin, strLine)) classNameList.push_back(strLine); fin.close();}// 单图推理bool ModelInference(cv::Mat srcImage, std::string& className, float& confidence){ auto start = chrono::high_resolution_clock::now(); cv::Mat image = srcImage.clone(); // 预处理(尺寸变换、通道变换、归一化) cv::cvtColor(image, image, cv::COLOR_BGR2RGB); cv::resize(image, image, cv::Size(224, 224)); image.convertTo(image, CV_32FC3, 1.0 / 255.0); cv::Scalar mean(0.485, 0.456, 0.406); cv::Scalar std(0.229, 0.224, 0.225); cv::subtract(image, mean, image); cv::divide(image, std, image); // cv::Mat blob = cv::dnn::blobFromImage(image); // 下边代码比上边blobFromImages速度更快 for (int r = 0; r < INPUT_H; r++) { float* rowData = image.ptr<float>(r); for (int c = 0; c < INPUT_W; c++) { mydata[0 * INPUT_H * INPUT_W + r * INPUT_W + c] = rowData[CHANNEL * c]; mydata[1 * INPUT_H * INPUT_W + r * INPUT_W + c] = rowData[CHANNEL * c + 1]; mydata[2 * INPUT_H * INPUT_W + r * INPUT_W + c] = rowData[CHANNEL * c + 2]; } } // 模型推理 // doInference(*context, blob.data, prob, BATCH_SIZE); doInference(*context, mydata, prob, BATCH_SIZE); // 推理结果后处理 cv::Mat preds = cv::Mat(BATCH_SIZE, OUTPUT_SIZE, CV_32FC1, (float*)prob); softmax(preds, preds); Point minLoc, maxLoc; double minValue = 0, maxValue = 0; cv::minMaxLoc(preds, &minValue, &maxValue, &minLoc, &maxLoc); int labelIndex = maxLoc.x; double probability = maxValue; className = classNameList[labelIndex]; confidence = probability; std::cout << "class:" << className << endl << "confidence:" << confidence << endl; auto end = chrono::high_resolution_clock::now(); auto ms = chrono::duration_cast std::cout << "Inference time by TensorRT:" << (ms / 1000.0).count() << "ms" << std::endl; return 0;}// GoogLeNet模型推理bool ModelInference_Batch(std::vectorfloat>& confidences){ auto start = std::chrono::high_resolution_clock::now(); if (srcImages.size() != BATCH_SIZE) return false; // 预处理(尺寸变换、通道变换、归一化) std::vector for (size_t i = 0; i < srcImages.size(); i++) { cv::Mat image = srcImages[i].clone(); cv::cvtColor(image, image, cv::COLOR_BGR2RGB); cv::resize(image, image, cv::Size(224, 224)); image.convertTo(image, CV_32FC3, 1.0 / 255.0); cv::Scalar mean(0.485, 0.456, 0.406); cv::Scalar std(0.229, 0.224, 0.225); cv::subtract(image, mean, image); cv::divide(image, std, image); images.push_back(image); } // 图像转blob格式 // cv::Mat blob = cv::dnn::blobFromImages(images); // 下边代码比上边blobFromImages速度更快 for (int b = 0; b < BATCH_SIZE; b++) { cv::Mat image = images[b]; for (int r = 0; r < INPUT_H; r++) { float* rowData = image.ptr<float>(r); for (int c = 0; c < INPUT_W; c++) { mydata[b * CHANNEL * INPUT_H * INPUT_W + 0 * INPUT_H * INPUT_W + r * INPUT_W + c] = rowData[CHANNEL * c]; mydata[b * CHANNEL * INPUT_H * INPUT_W + 1 * INPUT_H * INPUT_W + r * INPUT_W + c] = rowData[CHANNEL * c + 1]; mydata[b * CHANNEL * INPUT_H * INPUT_W + 2 * INPUT_H * INPUT_W + r * INPUT_W + c] = rowData[CHANNEL * c + 2]; } } } auto end1 = std::chrono::high_resolution_clock::now(); auto ms1 = std::chrono::duration_cast std::cout << "PreProcess time: " << (ms1 / 1000.0).count() << "ms" << std::endl; // 执行推理 doInference(*context, mydata, prob, BATCH_SIZE); auto end2 = std::chrono::high_resolution_clock::now(); auto ms2 = std::chrono::duration_cast std::cout << "Inference time: " << (ms2 / 1000.0).count() << "ms" << std::endl; // 推理结果后处理 cv::Mat result = cv::Mat(BATCH_SIZE, OUTPUT_SIZE, CV_32FC1, (float*)prob); softmax(result, result); for (int r = 0; r < BATCH_SIZE; r++) { cv::Mat scores = result.row(r).clone(); cv::Point minLoc, maxLoc; double minValue = 0, maxValue = 0; cv::minMaxLoc(scores, &minValue, &maxValue, &minLoc, &maxLoc); int labelIndex = maxLoc.x; double probability = maxValue; classNames.push_back(classNameList[labelIndex]); confidences.push_back(probability); } auto end3 = std::chrono::high_resolution_clock::now(); auto ms3 = std::chrono::duration_cast std::cout << "PostProcess time: " << (ms3 / 1000.0).count() << "ms" << std::endl; auto ms = std::chrono::duration_cast std::cout << "TensorRT batch" << BATCH_SIZE << " 推理时间:" << (ms / 1000.0).count() << "ms" << std::endl; return true;}int main(int argc, char** argv){ // onnx转engine // onnx_to_engine(onnxPath, enginePath, 0); // 模型初始化 ModelInit(enginePath, 0); // 读取图像 vector cv::glob(imagePath, filenames); // 单图推理测试 for (int n = 0; n < filenames.size(); n++) { // 重复100次,计算平均时间 auto start = chrono::high_resolution_clock::now(); cv::Mat src = imread(filenames[n]); std::string className; float confidence; for (int i = 0; i < 101; i++) { if (i == 1) start = chrono::high_resolution_clock::now(); ModelInference(src, className, confidence); } auto end = chrono::high_resolution_clock::now(); auto ms = chrono::duration_cast std::cout << "TensorRT 平均推理时间:---------------------" << (ms / 1000.0).count() << "ms" << std::endl; } // 批量(动态batch)推理测试 std::vector int okNum = 0, ngNum = 0; for (int n = 0; n < filenames.size(); n++) { cv::Mat image = imread(filenames[n]); srcImages.push_back(image); if ((n + 1) % BATCH_SIZE == 0 || n == filenames.size() - 1) { // 重复100次,计算平均时间 auto start = chrono::high_resolution_clock::now(); for (int i = 0; i < 101; i++) { if (i == 1) start = chrono::high_resolution_clock::now(); std::vector std::vector<float> confidences; ModelInference_Batch(srcImages, classNames, confidences); for (int j = 0; j < classNames.size(); j++) { if (classNames[j] == "0") okNum++; else ngNum++; } } srcImages.clear(); auto end = chrono::high_resolution_clock::now(); auto ms = chrono::duration_cast std::cout << "TensorRT " << BATCH_SIZE << " 平均推理时间:---------------------" << (ms / 1000.0).count() << "ms" << std::endl; } } GpuMemoryRelease(); std::cout << "all_num = " << filenames.size() << endl << "okNum = " << okNum << endl << "ngNum = " << ngNum << endl; return 0;} |
5.3 fp32、fp16模型对比测试
fp16模型推理结果几乎和fp32一致,但是却较大的节约了显存和内存占用,同时推理速度也有明显的提升。
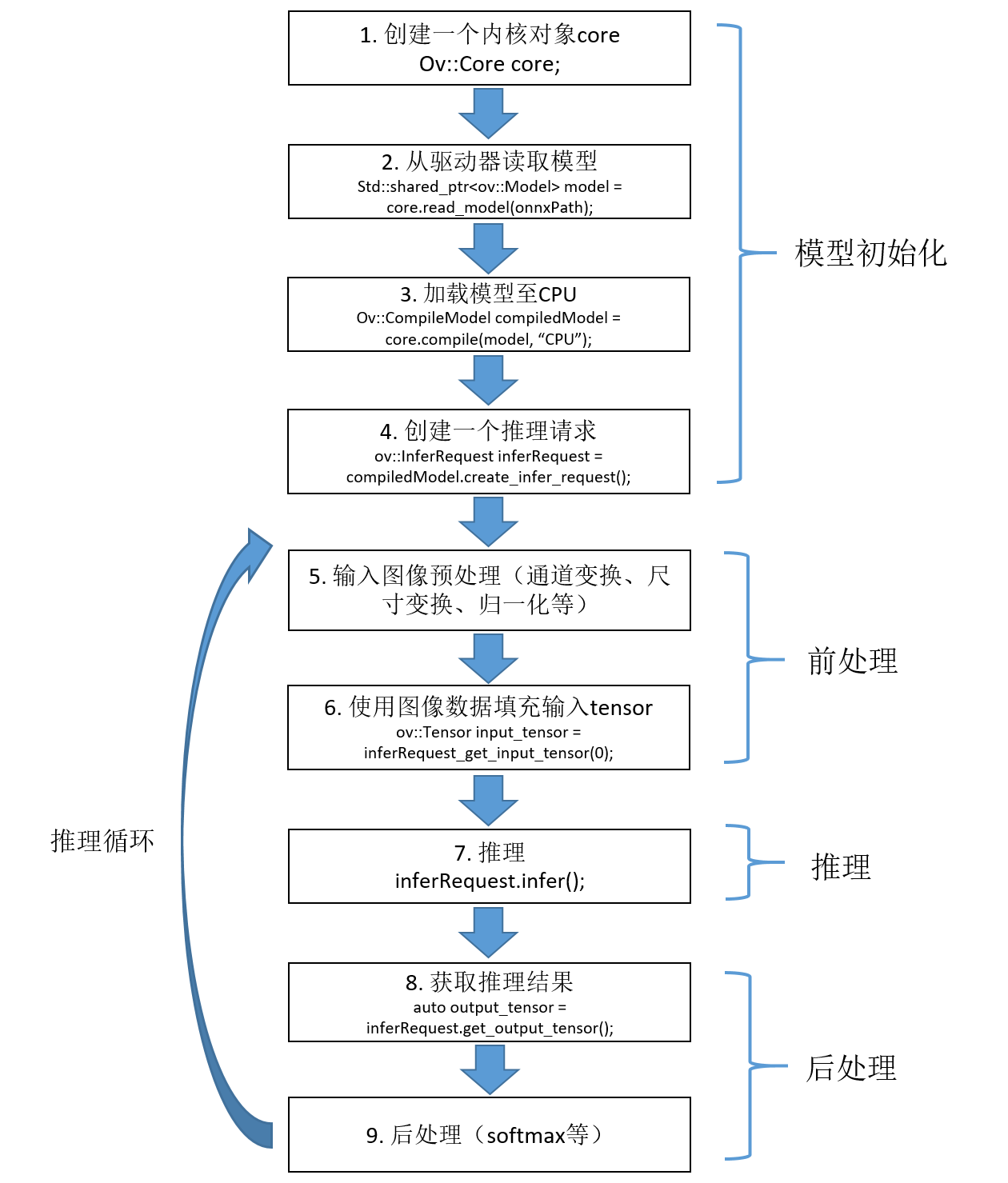
6. OpenVINO部署GoogLeNet
6.1 推理过程及代码
代码:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 | /* 推理过程* 1. Create OpenVINO-Runtime Core* 2. Compile Model* 3. Create Inference Request* 4. Set Inputs* 5. Start Inference* 6. Process inference Results*/#include #include #include #include #include using namespace std;using namespace InferenceEngine;using namespace cv;std::string onnxPath = "E:/inference-master/models/GoogLeNet/googlenet-pretrained_batch1.onnx";std::string imagePath = "E:/inference-master/images/catdog";std::string classNamesPath = "E:/inference-master/imagenet-classes.txt"; // 标签名称列表(类名)ov::InferRequest inferRequest;std::vector// 标签名,可以从文件读取int batchSize = 1;// softmax,输入输出为数组std::vector<float> softmax(std::vector<float> input){ float total = 0; for (auto x : input) total += exp(x); std::vector<float> result; for (auto x : input) result.push_back(exp(x) / total); return result;}// softmax,输入输出为Matint softmax(const cv::Mat& src, cv::Mat& dst){ float max = 0.0; float sum = 0.0; max = *max_element(src.begin<float>(), src.end<float>()); cv::exp((src - max), dst); sum = cv::sum(dst)[0]; dst /= sum; return 0;}// 模型初始化void ModelInit(string onnxPath){ // Step 1: 创建一个Core对象 ov::Core core; // 打印当前设备 std::vector for (int i = 0; i < availableDevices.size(); i++) printf("supported device name: %s\n", availableDevices[i].c_str()); // Step 2: 读取模型 std::shared_ptr // Step 3: 加载模型到CPU ov::CompiledModel compiled_model = core.compile_model(model, "CPU"); // 设置推理实例并发数为5个 //core.set_property("CPU", ov::streams::num(10)); // 设置推理实例数为自动分配 //core.set_property("CPU", ov::streams::num(ov::streams::AUTO)); // 推理实例数按计算资源平均分配 //core.set_property("CPU", ov::streams::num(ov::streams::NUMA)); // 设置推理实例的线程并发数为10 // core.set_property("CPU", ov::inference_num_threads(20)); // Step 4: 创建推理请求 inferRequest = compiled_model.create_infer_request(); // 读取标签名称 ifstream fin(classNamesPath.c_str()); string strLine; classNameList.clear(); while (getline(fin, strLine)) classNameList.push_back(strLine); fin.close();}// 单图推理void ModelInference(cv::Mat srcImage, std::string& className, float& confidence ){ auto start = chrono::high_resolution_clock::now(); // Step 5: 将输入数据填充到输入tensor // 通过索引获取输入tensor ov::Tensor input_tensor = inferRequest.get_input_tensor(0); // 通过名称获取输入tensor // ov::Tensor input_tensor = infer_request.get_tensor("input"); // 预处理 cv::Mat image = srcImage.clone(); cv::cvtColor(image, image, cv::COLOR_BGR2RGB); resize(image, image, Size(224, 224)); image.convertTo(image, CV_32FC3, 1.0 / 255.0); Scalar mean(0.485, 0.456, 0.406); Scalar std(0.229, 0.224, 0.225); subtract(image, mean, image); divide(image, std, image); // HWC -> NCHW ov::Shape tensor_shape = input_tensor.get_shape(); const size_t channels = tensor_shape[1]; const size_t height = tensor_shape[2]; const size_t width = tensor_shape[3]; float* image_data = input_tensor.data<float>(); for (size_t r = 0; r < height; r++) { for (size_t c = 0; c < width * channels; c++) { int w = (r * width * channels + c) / channels; int mod = (r * width * channels + c) % channels; // 0,1,2 image_data[mod * width * height + w] = image.at<float>(r, c); } } // --------------- Step 6: Start inference --------------- inferRequest.infer(); // --------------- Step 7: Process the inference results --------------- // model has only one output auto output_tensor = inferRequest.get_output_tensor(); float* detection = (float*)output_tensor.data(); ov::Shape out_shape = output_tensor.get_shape(); int batch = output_tensor.get_shape()[0]; int num_classes = output_tensor.get_shape()[1]; cv::Mat result(batch, num_classes, CV_32F, detection); softmax(result, result); Point minLoc, maxLoc; double minValue = 0, maxValue = 0; cv::minMaxLoc(result, &minValue, &maxValue, &minLoc, &maxLoc); int labelIndex = maxLoc.x; double probability = maxValue; auto end = chrono::high_resolution_clock::now(); auto ms = chrono::duration_cast std::cout << "openvino单张推理时间:" << ms.count() << "ms" << std::endl;}// 多图并行推理(动态batch)void ModelInference_Batch(std::vectorfloat>& confidences){ auto start = chrono::high_resolution_clock::now(); // Step 5: 将输入数据填充到输入tensor // 通过索引获取输入tensor ov::Tensor input_tensor = inferRequest.get_input_tensor(0); // 通过名称获取输入tensor // ov::Tensor input_tensor = infer_request.get_tensor("input"); // 预处理(尺寸变换、通道变换、归一化) std::vector for (size_t i = 0; i < srcImages.size(); i++) { cv::Mat image = srcImages[i].clone(); cv::cvtColor(image, image, cv::COLOR_BGR2RGB); cv::resize(image, image, cv::Size(224, 224)); image.convertTo(image, CV_32FC3, 1.0 / 255.0); cv::Scalar mean(0.485, 0.456, 0.406); cv::Scalar std(0.229, 0.224, 0.225); cv::subtract(image, mean, image); cv::divide(image, std, image); images.push_back(image); } ov::Shape tensor_shape = input_tensor.get_shape(); const size_t batch = tensor_shape[0]; const size_t channels = tensor_shape[1]; const size_t height = tensor_shape[2]; const size_t width = tensor_shape[3]; float* image_data = input_tensor.data<float>(); // 图像转blob格式(速度比下边像素操作方式更快) cv::Mat blob = cv::dnn::blobFromImages(images); memcpy(image_data, blob.data, batch * 3 * height * width * sizeof(float)); // NHWC -> NCHW //for (size_t b = 0; b < batch; b++){ // for (size_t r = 0; r < height; r++) { // for (size_t c = 0; c < width * channels; c++) { // int w = (r * width * channels + c) / channels; // int mod = (r * width * channels + c) % channels; // 0,1,2 // image_data[b * 3 * width * height + mod * width * height + w] = images[b].at // } // } //} auto end1 = std::chrono::high_resolution_clock::now(); auto ms1 = std::chrono::duration_cast std::cout << "PreProcess time: " << (ms1 / 1000.0).count() << "ms" << std::endl; // --------------- Step 6: Start inference --------------- inferRequest.infer(); auto end2 = std::chrono::high_resolution_clock::now(); auto ms2 = std::chrono::duration_cast std::cout << "Inference time: " << (ms2 / 1000.0).count() << "ms" << std::endl; // --------------- Step 7: Process the inference results --------------- // model has only one output auto output_tensor = inferRequest.get_output_tensor(); float* detection = (float*)output_tensor.data(); ov::Shape out_shape = output_tensor.get_shape(); int num_classes = output_tensor.get_shape()[1]; cv::Mat output(batch, num_classes, CV_32F, detection); int rows = output.size[0]; // batch int cols = output.size[1]; // 类别数(每一个类别的得分) for (int row = 0; row < rows; row++) { cv::Mat scores(1, cols, CV_32FC1, output.ptr<float>(row)); softmax(scores, scores); // 结果归一化 Point minLoc, maxLoc; double minValue = 0, maxValue = 0; cv::minMaxLoc(scores, &minValue, &maxValue, &minLoc, &maxLoc); int labelIndex = maxLoc.x; double probability = maxValue; classNames.push_back(classNameList[labelIndex]); confidences.push_back(probability); } auto end3 = std::chrono::high_resolution_clock::now(); auto ms3 = std::chrono::duration_cast std::cout << "PostProcess time: " << (ms3 / 1000.0).count() << "ms" << std::endl; auto ms = chrono::duration_cast std::cout << "openvino单张推理时间:" << ms.count() << "ms" << std::endl;}int main(int argc, char** argv){ // 模型初始化 ModelInit(onnxPath); // 读取图像 vector glob(imagePath, filenames); // 单图推理测试 for (int n = 0; n < filenames.size(); n++) { // 重复100次,计算平均时间 auto start = chrono::high_resolution_clock::now(); for (int i = 0; i < 101; i++) { if (i == 1) start = chrono::high_resolution_clock::now(); cv::Mat src = imread(filenames[n]); std::string className; float confidence; ModelInference(src, className, confidence); } auto end = chrono::high_resolution_clock::now(); auto ms = chrono::duration_cast std::cout << "opencv_dnn 单图平均推理时间:---------------------" << (ms / 1000.0).count() << "ms" << std::endl; } std::vector for (int i = 0; i < filenames.size(); i++) { cv::Mat image = imread(filenames[i]); srcImages.push_back(image); if ((i + 1) % batchSize == 0 || i == filenames.size() - 1) { // 重复100次,计算平均时间 auto start = chrono::high_resolution_clock::now(); for (int i = 0; i < 101; i++) { if (i == 1) start = chrono::high_resolution_clock::now(); std::vector std::vector<float> confidences; ModelInference_Batch(srcImages, classNames, confidences); } srcImages.clear(); auto end = chrono::high_resolution_clock::now(); auto ms = chrono::duration_cast std::cout << "openvino batch" << batchSize << " 平均推理时间:---------------------" << (ms / 1000.0).count() << "ms" << std::endl; } } return 0;} |
注意:OV支持多图并行推理,但是要求转出onnx的时候batch就要使用固定数值。动态batch(即batch=-1)的onnx文件会报错。
6.2 遇到的问题
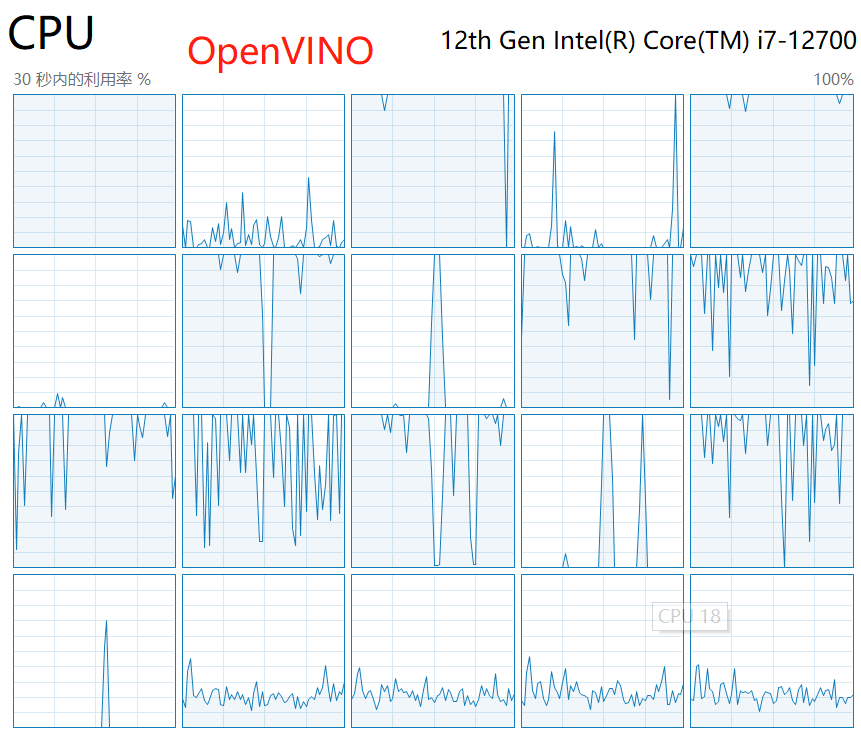
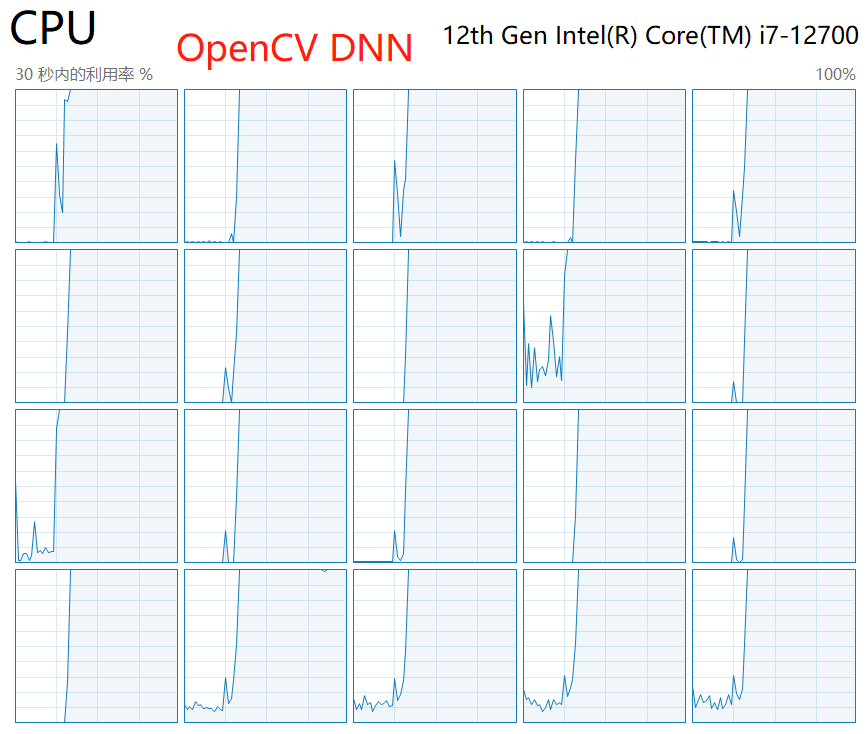
理论:OpenVINO是基于CPU推理最佳的方式。
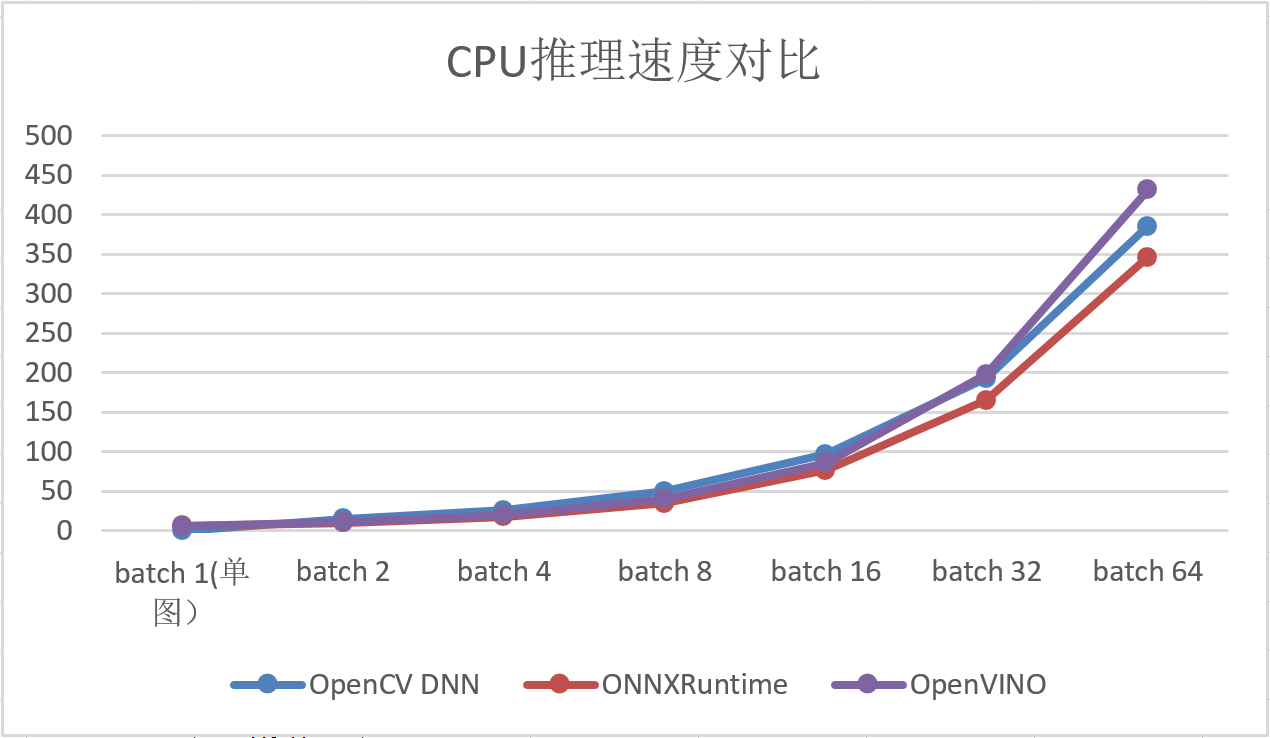
实测:在测试OpenVINO的过程中,我们发现OpenVINO推理对于CPU的利用率远没有OpenCV DNN和ONNXRuntime高,这也是随着batch数量增加,OV在CPU上的推理速度反而不如DNN和ORT的主要原因。尝试过网上的多种优化方式,比如设置线程数并发数等等,未取得任何改善。如下图,在OpenVINO推理过程中,始终只有一半的CPU处于活跃状态;而OnnxRuntime或者OpenCV DNN推理时,所有的CPU均处于活跃状态。
7. 四种推理方式对比测试
深度学习领域常用的基于CPU/GPU的推理方式有OpenCV DNN、ONNXRuntime、TensorRT以及OpenVINO。这几种方式的推理过程可以统一用下图来概述。整体可分为模型初始化部分和推理部分,后者包括步骤2-5。
以GoogLeNet模型为例,测得几种推理方式在推理部分的耗时如下:
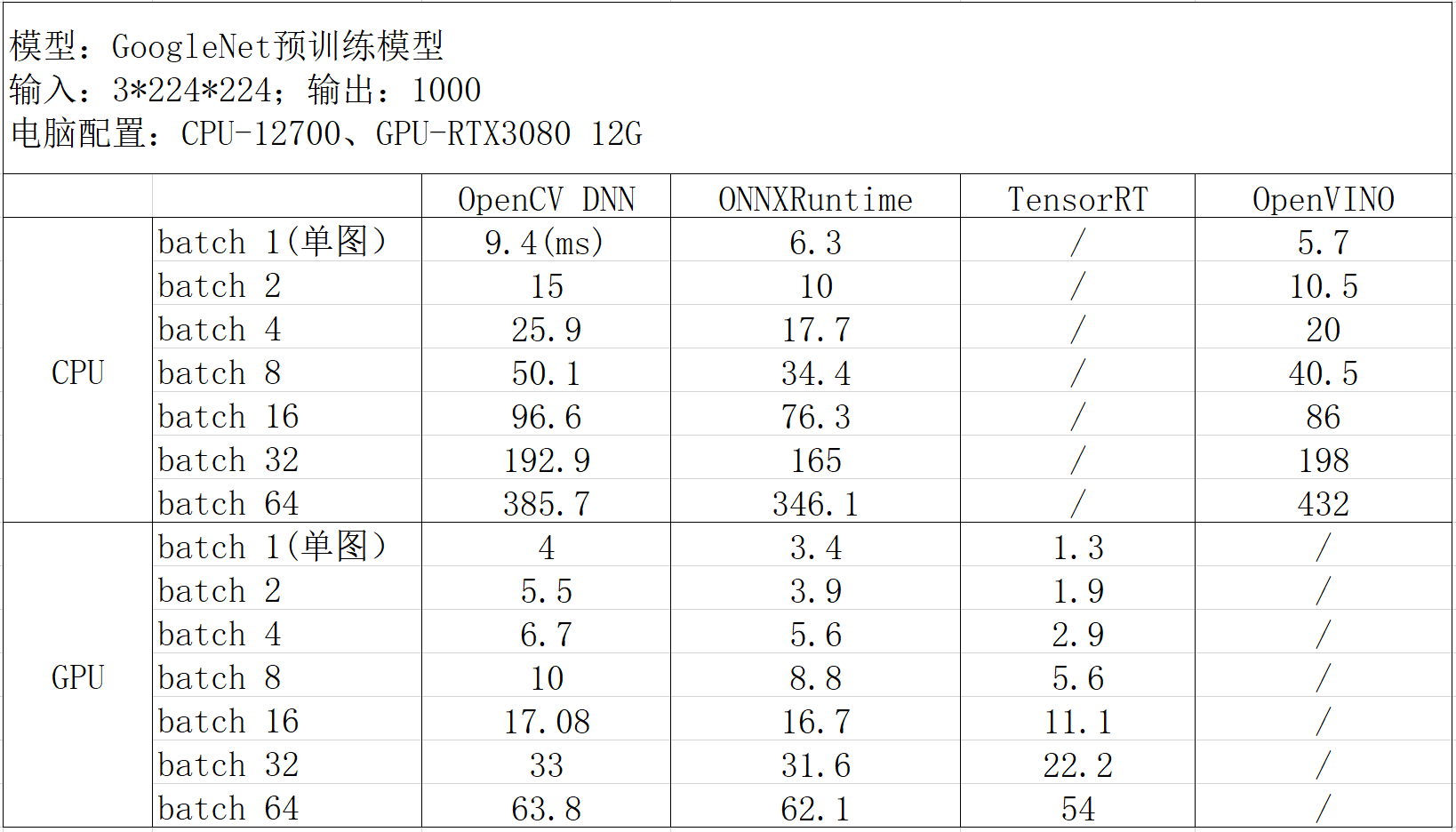
基于CPU推理:
基于GPU推理:
不论采用何种推理方式,同一网络的前处理和后处理过程基本都是一致的。所以,为了更直观的对比几种推理方式的速度,我们抛去前后处理,只统计图中实际推理部分,即3、4、5这三个过程的执行时间。
同样是GoogLeNet网络,步骤3-5的执行时间对比如下:
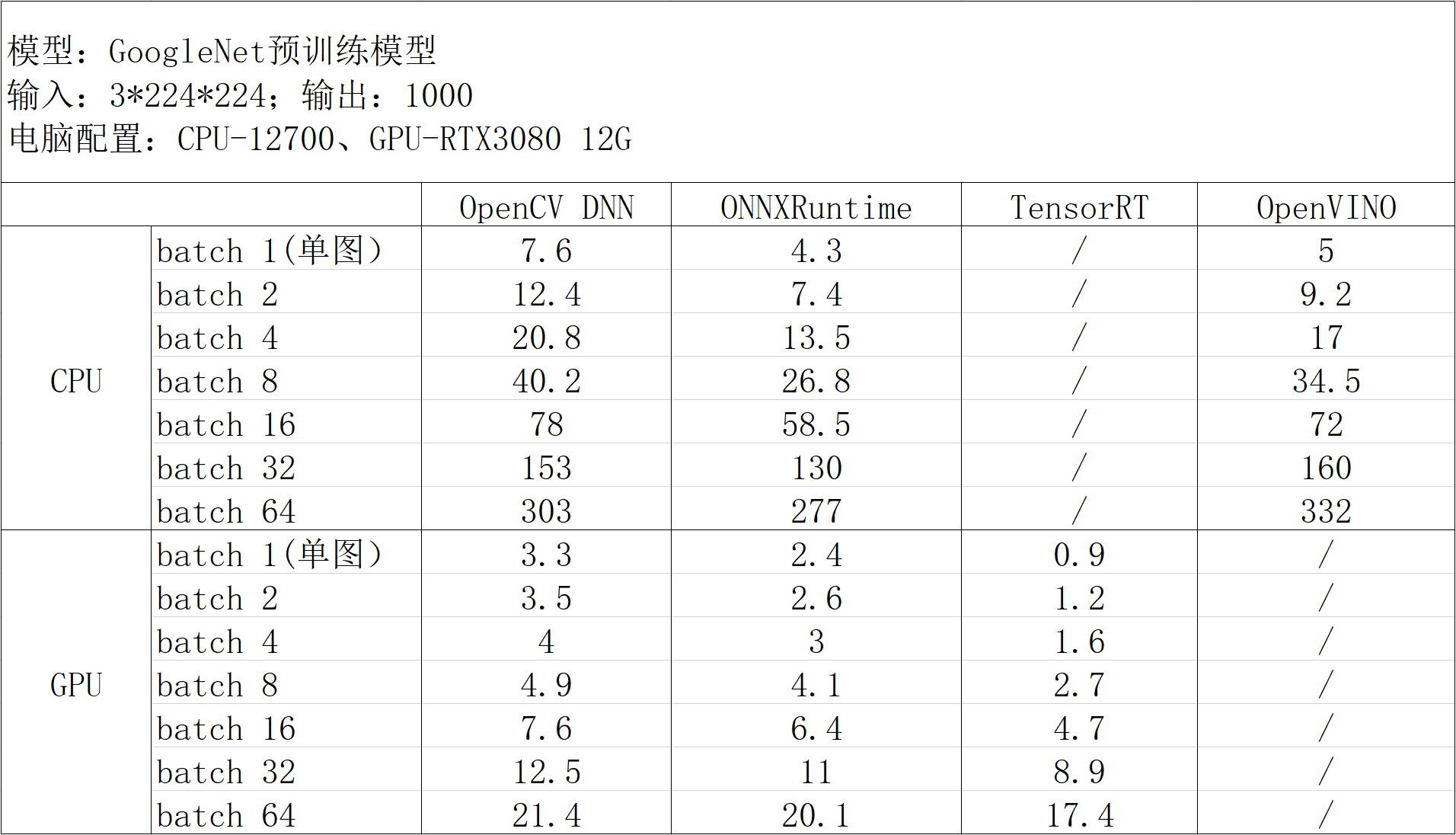
注:OpenVINO-CPU测试中始终只使用了一半数量的内核,各种优化设置都没有改善。
最终结论:
- GPU加速首选TensorRT;
- CPU加速,单图推理首选OpenVINO,多图并行推理可选择ONNXRuntime;
- 如果需要兼具CPU和GPU推理功能,可选择ONNXRuntime。
参考资料
1. openvino2022版安装配置与C++SDK开发详解
2. https://github.com/NVIDIA/TensorRT