-
FANUC机器人程序设计
一.注意事项
1.FANUC机器人所有者、操作者必须对自己的安全负责。FANUC不对机器使用的安全问题负责。FANUC提醒用户在使用FANUC机器人时必须使用安全设备,必须遵守安全条款。
2.FANUC机器人程序的设计者、机器人系统的设计和调试者、安装者必须熟悉FANUC机器人的编程方式和系统应用及安装。
3.FANUC机器人和其他设备有很大的不同,不同点在于机器人可以以很高的速度移动很大的距离。
二、机器人系统的组成

1.机器人的概论
机器人由伺服电机驱动的机械机构组成的,各环节每一个结合处为一个关节点或坐标系。

2.机器人的应用
弧焊 点焊 搬运 涂胶 喷漆 去毛刺 切割 激光焊接 测量等
3.机器人的常规型号
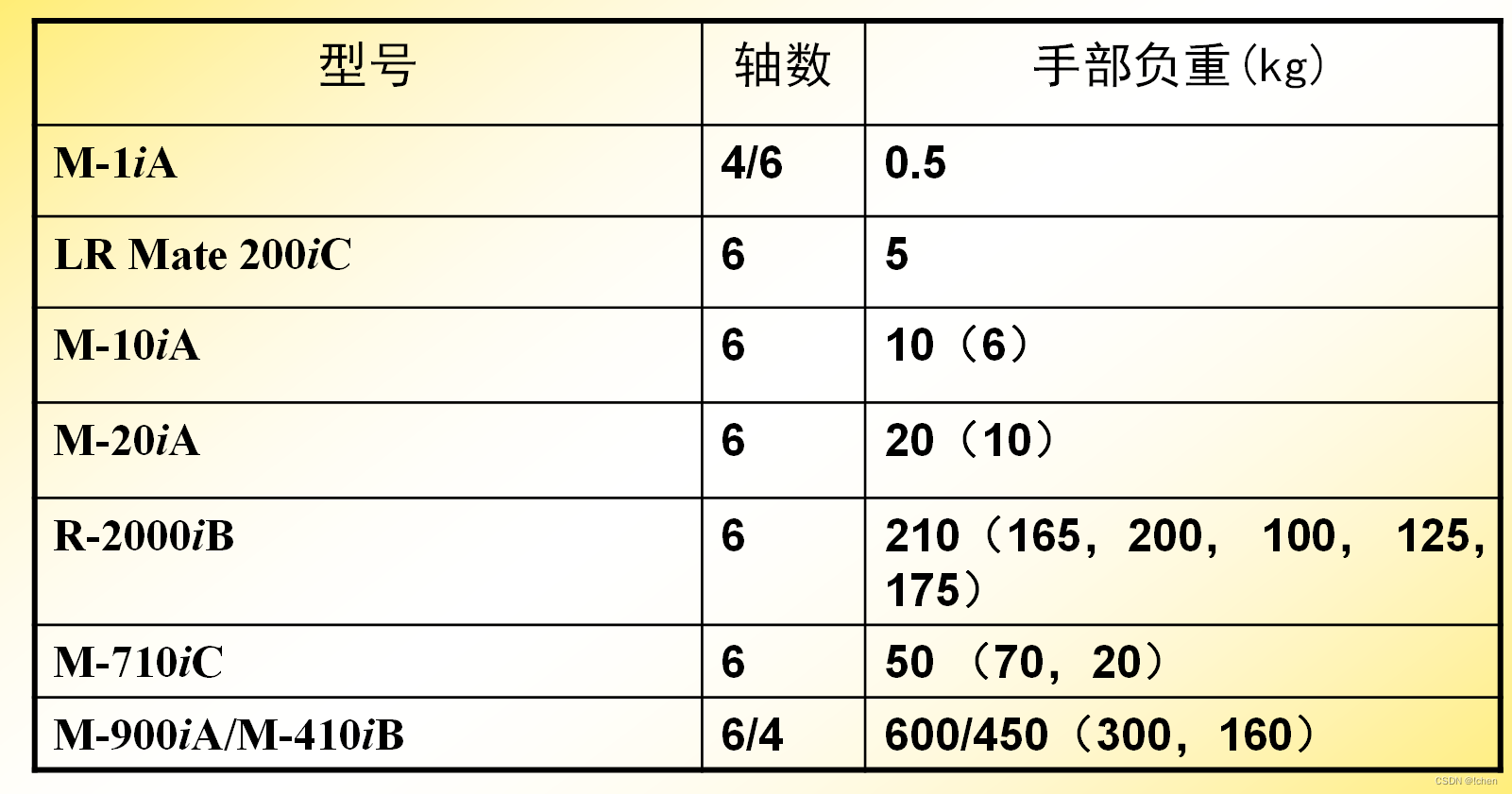
4.机器人的主要参数
Ø手部负重、Ø运动轴数、Ø2,3轴负重、Ø运动范围、Ø安装方式、Ø重复定位精度、Ø最大运动速度
5.机器人的编程方式
在线编程: 在现场使用示教盒编程。
离线编程: 在 PC 上安装 FANUC 的编程软件,可以实现离线编程。6、机器人的特色功能
Ø High sensitive collision detector高性能碰撞检测机能;
机器人无须外加传感器,各种场合均适用。
Ø Soft float软浮动功能 用于机床工件的安装和取出,有弹性的机械手。
Ø Remote TCP7、附加轴
Ø R-J3 i C 控制器最多能控制 40 根轴,可分多个组控制,每个组最多可以控制 9 根轴。每个组的操作是相互独立的 。三.系统软件
Handling Tool 用于搬运
Arc Tool 用于弧焊
Spot Tool 用于点焊
Dispense Tool 用于布胶
Paint Tool 用于油漆
Laser Tool 用于激光焊接和切割
四、控制器
控制器是机器人控制单元,由以下部分组成:
• 示教盒( Teach Pendant );• 操作面板及其电路板( Operate Panel );• 主板( Main Board );• 主板电池( Battery );• I/O 板( I/O Board );• 电源供给单元( PSU )• 紧急停止单元( E - Stop Unit );• 伺服放大器 (Servo Amplifier) ;• 变压器 (Transformer) ;• 风扇单元 (Fan Unit) ;• 线路断开器 (Breaker) ;• 再生电阻 (Regenerative Resistor) 等 。五、非运动指令
1. 寄存器指令 Registers2. I/O 指令 I/O3. 条件指令 IF4. 条件选择指令 SELECT5. 等待指令 WAIT6. 跳转 / 标签指令 JMP/LBL7. 呼叫指令 CALL8. 偏移条件指令 OFFSET9. 工具坐标系调用指令 UTOOL_NUM10. 用户坐标系调用指令 UFRAME_NUM11. 其他指令程序视列
- PART1
- 1:TIMER[ 1]=RESET
- 2:TIMER[1]=START
- 3:UTOOL_NUM=1
- 4:UFRAME_NUM=1
- 5:OVERRIDE=30%
- 6:R[1]=0
- 7:J PR[1:HOME] 100% FINE
- 8:LBL[1]
- 9:J P[1] 100% FINE
- 10:J P[2] 100% FINE Offset,PR[6]
- 11:J P[3] 100% FINE
- 12:R[1]=R[1]+1
- 13:IF R[1]<3, JMP LBL[1]
- 14:WAIT DI[1]=ON
- 15:CALL TEST1
- 16:J PR[1:HOME] 100% FINE
- 17:Message [PART1 FINISH]
- 18:TIMER[1]=STOP
- 19:!PART1 FINISHED
- [ END ]
-
相关阅读:
vue课程79 介绍并安装vue-cli
视频直播平台如何选择合适的CDN
测试流程||功能测试
SAP SALV14 增强SALV使SALV支持列级别、行级别、单元格级别的编辑模式切换
3 学习用特殊字符串联命令
OSPF高级配置——虚接口,NSSA
rocketmq Listener 消费消息的优雅方式(基于SPEL)
TypeScript常见类型错误 | 类型EventTarget上不存在属性 - ts中的dom类型
ES7 Nested Sort Search
OpenShift 4 - 用 Percona XtraDB Cluster 在 OpenShift 部署运行 MySQL 多副本集群
- 原文地址:https://blog.csdn.net/xdpcxq/article/details/128157483
