-
【数据结构】图的实现
图
1.图的基本概念
图是由顶点集合及顶点间的关系组成的一种数据结构:G = (V, E),其中:
- 顶点集合V = {x|x属于某个数据对象集}是有穷非空集合;
- E = {(x,y)|x,y属于V}或者E = {
做边的集合。 - (x, y)表示x到y的一条双向通路,即(x, y)是无方向的;Path(x, y)表示从x到y的一条单向通路,即Path(x, y)是有方向的。
图相关的概念
- 顶点和边:图中结点称为顶点,第i个顶点记作vi。两个顶点vi和vj相关联称作顶点vi和顶点vj之间有一条边,图中的第k条边记作ek,ek = (vi,vj)或
。 - 有向图和无向图:在有向图中,顶点对
称为顶点x到顶点y的一条边(弧),

- 无向完全图:即图中每两个顶点都有边。在有n个顶点的无向图中,若有n * (n-1)/2条边,即任意两个顶点之间有且仅有一条边,则称此图为无向完全图 。
- 有向完全图:在n个顶点的有向图中,若有n * (n-1)条边,即任意两个顶点之间有且仅有方向相反的边,则称此图为有向完全图。
顶点的度
- 顶点的度:顶点v的度是指与它相关联的边的条数,记作deg(v)。在有向图中,顶点的度等于该顶点的入度与出度之和。在无向图中顶点的度等于该顶点的入度和出度,即dev(v)=indev(v) = outdev(v)。
路径
- 路径:在图G = (V, E)中,若从顶点vi出发有一组边使其可到达顶点vj,则称顶点vi到顶点vj的顶点序列为从顶点vi到顶点vj的路径
- 路径长度:对于不带权的图,一条路径的路径长度是指该路径上的边的条数;**对于带权的图,一条路径的路径长度是指该路径上各个边权值的总和。 **

子图
子图:设图G = {V, E}和图G1 = {V1,E1},若V1属于V且E1属于E,则称G1是G的子图。

**连通图:**在无向图中,若从顶点v1到顶点v2有路径,则称顶点v1与顶点v2是连通的。如果图中任
意一对顶点都是连通的,则称此图为连通图。**强连通图:**在有向图中,若在每一对顶点vi和vj之间都存在一条从vi到vj的路径,也存在一条从vj
到vi的路径,则称此图是强连通图生成树:一个连通图的最小连通子图称作该图的生成树。有n个顶点的连通图的生成树有n个顶点
和n-1条边。2.图的存储结构
图的存储方式主要有两种,一种叫邻接矩阵,一种叫做邻接表。
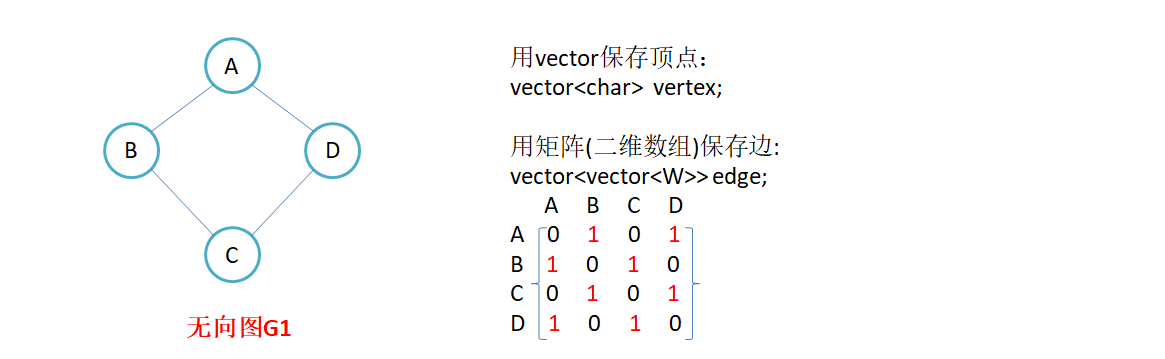
3.邻接矩阵
因为节点与节点之间的关系就是连通与否,即为0或者1,因此邻接矩阵(二维数组)即是:先用一
个数组将定点保存,然后采用矩阵来表示节点与节点之间的关系。无向图
有向图

注意:
无向图的邻接矩阵是一个对称图;第i行(列)元素之和,就是顶点i的度。有向图的邻接矩阵则不一
定是对称的,第i行(列)元素之后就是顶点i 的出(入)度。带权图
对于有权值的图:边的关系就用权值代替,如果两个顶点不通,则使用无穷大代替。

3.1邻接矩阵的优缺点
优点:
- 能够快速知道两个顶点是否连通。
缺点:
- 顶点比较多,边比较少时,矩阵中存储了大量的0成为系数矩阵,比较浪费空间,并且要求两个节点之间的路径不是很好求。
3.2邻接矩阵的实现
基本接口框架:包括构造函数,边的添加函数,返回下标等
namespace matrix { template <class V, class W, W MAX_W = INT64_MAX, bool Direction = false> class Graph { struct edge { size_t _srci; //起点下标 size_t _dsti; //指向下标 W _w; //权值 edge(size_t srci, size_t dsti, W w) : _srci(srci), _dsti(dsti), _w(w) { } bool operator>(const edge &e) const { return _w > e._w; } }; typedef Graph<V, W, MAX_W, Direction> self; public: Graph() = default; //构造函数 Graph(const V *v, size_t n) { _vertexs.reserve(n); for (size_t i = 0; i < n; i++) { _vertexs.push_back(v[i]); _indexmap[v[i]] = i; } //为存储边的矩阵开辟空间 _matrix.resize(n); for (size_t i = 0; i < _matrix.size(); i++) { _matrix[i].resize(n, MAX_W); } } //返回顶点的下标 size_t GetVertexIndex(const V &v); //边的添加函数 void addedge(const V &src, const V &dst, const W &w); //打印邻接矩阵函数 void Print(); private: unordered_map<V, int> _indexmap; //记录顶点和下标的映射关系 vector<V> _vertexs; // 顶点集合的集合 vector<vector<W>> _matrix; // 存储边集合的矩阵 }; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
返回顶点的下标
顶点和顶点下标的映射关系,由一个Hash表存储。可以直接访问Hash表得到顶点的下标
//获取顶点的下标API size_t GetVertexIndex(const V &v) { auto it = _indexmap.find(v); if (it != _indexmap.end()) { return _indexmap[v]; } else { std::cout << "不存在这样的节点" << std::endl; return -1; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
添加边API
添加边时,需要判断图是否为有向图。如果是一个无向图,那么天需要添加两次。
void _addedge(size_t srci, size_t dsti, const W &w) { _matrix[srci][dsti] = w; if (Direction == false) { _matrix[dsti][srci] = w; } } void addedge(const V &src, const V &dst, const W &w) { size_t srci = GetVertexIndex(src); size_t dsti = GetVertexIndex(dst); assert(srci != -1); assert(dsti != -1); _addedge(srci, dsti, w); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
打印临界矩阵
如果两个顶点直接没有边,就使用*表示
void Print() { //先打印顶点 for (int i = 0; i < _vertexs.size(); i++) { cout << "[" << i << "]" << "->" << _vertexs[i]<<endl; } cout << endl; // 横下标 cout << " "; for (size_t i = 0; i < _vertexs.size(); ++i) { // cout << i << " "; printf("%4d", i); } cout << endl; for (size_t i = 0; i < _matrix.size(); ++i) { cout << i << " "; // 竖下标 for (size_t j = 0; j < _matrix[i].size(); ++j) { // cout << _matrix[i][j] << " "; if (_matrix[i][j] == MAX_W) { // cout << "* "; printf("%4c", '*'); } else { // cout << _matrix[i][j] << " "; printf("%4d", _matrix[i][j]); } } cout << endl; } cout << endl; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
接口测试结果
void test_matrix(){ matrix::Graph<char, int, INT64_MAX, true> g("0123", 4); g.addedge('0', '1', 1); g.addedge('0', '3', 4); g.addedge('1', '3', 2); g.addedge('1', '2', 9); g.addedge('2', '3', 8); g.addedge('2', '1', 5); g.addedge('2', '0', 3); g.addedge('3', '2', 6); g.Print(); } int main() { test_matrix(); return 0; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17

4.邻接表
邻接表:使用数组表示顶点的集合,使用链表表示边的关系。
无向图邻接表

**注意:**无向图中同一条边在邻接表中出现了两次。如果想知道顶点vi的度,只需要知道顶点vi边链表集合中结点的数目即可。
有向图邻接表

**注意:**有向图中每条边在邻接表中只出现一次,与顶点vi对应的邻接表所含结点的个数,就是该顶点的出度,也称出度表,要得到vi顶点的入度,必须检测其他所有顶点对应的边链表,看有多少边顶点的dst取值是i。
4.1邻接表的实现
基本接口框架:包括构造函数,边的添加函数,返回下标等;
namespace link_table { template <class V, class W, W MAX_W = INT64_MAX, bool Direction = false> class Graph { typedef Graph<V, W, MAX_W, Direction> self; struct edge { //由于是链表,起点就是当前点,所以一般都省略 // int _srci; size_t _dsti; //目标点 W _w; //权值 //用一个链表将于该顶点相连的顶点连接起来 edge *_next; edge(size_t dsti, const W& w) : _dsti(dsti), _w(w), _next(nullptr) { } }; public: //构造函数 Graph() = default; Graph(const V *a, size_t n) { _vertexs.reserve(n); //添加顶点 for (size_t i = 0; i < n; i++) { _vertexs.push_back(a[i]); _indexmap[a[i]] = i; } _tables.resize(n, nullptr); } //获取顶点的下标 size_t GetVertexIndex(const V &v); //添加边的API void addedge(const V &src, const V &dst, const W &w); //打印接口API void Print(); private: unordered_map<V, int> _indexmap; //记录顶点和下标的映射关系 vector<V> _vertexs; // 顶点集合的集合 vector<edge *> _tables; //邻接表 }; };- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
获取顶点的下标
顶点和顶点下标的映射关系,由一个Hash表存储。可以直接访问Hash表得到顶点的下标。
//获取顶点的下标 size_t GetVertexIndex(const V &v) { auto it = _indexmap.find(v); if (it != _indexmap.end()) { return _indexmap[v]; } else { std::cout << "不存在这样的节点" << std::endl; return -1; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
添加边
//添加边 void addedge(const V &src, const V &dst, const W &w) { size_t srci = GetVertexIndex(src); size_t dsti = GetVertexIndex(dst); //头插的方式 edge *head = _tables[srci]; edge *eg = new edge(dsti, w); eg->_next = head; _tables[srci] = eg; //如果是无向图 if (Direction == false) { edge *eg = new edge(srci, w); eg->_next = _tables[dsti]; _tables[dsti] = eg; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
打印邻接表
void Print() { //打印顶点 for (size_t i = 0; i < _vertexs.size(); i++) { cout << "[" << i << "]" << "->" << _vertexs[i] << endl; } //打印边 for (size_t i = 0; i < _tables.size(); i++) { cout << _vertexs[i] << "[ " << i << "]->"; edge *cur = _tables[i]; while (cur) { cout << "[" << _vertexs[cur->_dsti] << ":" << cur->_dsti << ":" << cur->_w << "]->"; cur = cur->_next; } cout << "nullptr" << endl; } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
测试邻接表的实现
void test_table() { string a[] = {"张三", "李四", "王五", "赵六"}; link_table::Graph<string, int> g1(a, 4); g1.addedge("张三", "李四", 100); g1.addedge("张三", "王五", 200); g1.addedge("王五", "赵六", 30); g1.Print(); } int main() { test_table(); return 0; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14

5.图的遍历
图的遍历有两种方式,一种是广度优先遍历(BFS),另一种是深度优先遍历(DFS)。下面以邻接矩阵为例,实现图的广度优先遍历和深度优先遍历。
5.1广度优先遍历
比如现在你需要找你的钥匙,有三个抽屉,东西在哪个抽屉不清楚,现在要将其找到,广度优先遍历的做法是:
- 先将三个抽屉打开,在三个抽屉的最外层找一遍
- 依次打开三个抽屉的第二层,再找一遍。
- 如果没有找到,依次打开第三个抽屉的第三层,再找一边…
- 重复上面的操作,直到找到钥匙…

邻接矩阵的广度优先遍历实现
思路:像树的层序遍历一样,借助一个队列实现广度遍历。

但是可能会出现重复遍历的问题,造成死循环。
解决办法:使用一个标记数组,记录顶点是否已经被遍历。如果顶点已经被遍历,则不再入队列。

void BFS(const V &src) { size_t srci = GetVertexIndex(src); //遍历队列 queue<int> q; //标记数组 vector<bool> visited(_vertexs.size(), false); q.push(srci); visited[srci] = true; int n = _vertexs.size(); int num = 0; int size = 1; while (!q.empty()) { cout << "第" << num << "层:" << endl; for (int i = 0; i < size; i++) { int front = q.front(); q.pop(); cout << front << ":" << _vertexs[front] << " "; for (int i = 0; i < n; i++) { if (_matrix[front][i] != MAX_W && !visited[i]) { q.push(i); visited[i] = true; } } cout << endl; } num++; size = q.size(); } cout << endl; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
测试程序
void test_matrix() { matrix::Graph<char, int, INT64_MAX, false> g("ABCDEFGHI", 9); g.addedge('A','B',1); g.addedge('A','C',1); g.addedge('A','D',1); g.addedge('B','E',1); g.addedge('B','C',1); g.addedge('C','F',1); g.addedge('D','F',1); g.addedge('E','G',1); g.addedge('F','H',1); g.addedge('H','I',1); g.Print(); g.BFS('A'); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16

美团的面试题:六度人脉理论

这个题的思路需要用到广度优先遍历,每一层就是小点的一度人脉。
void test_matrix() { string name[]={"小美","小团","小卓","小越","小诚","小信"}; matrix::Graph<string, int> g(name, 6); g.addedge("小美","小团",1); g.addedge("小美","小卓",1); g.addedge("小美","小诚",1); g.addedge("小团","小诚",1); g.addedge("小卓","小越",1); g.addedge("小卓","小信",1); g.addedge("小信","小越",1); g.BFS("小美"); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13

5.2深度优先遍历

深度优先遍历的遍历顺序与顶点插入顺序有关,不同的插入顺序可能有不同的遍历结果。

void _DFS(size_t srci, vector<bool> &visited) { cout << srci << ":" << _vertexs[srci] << " "; visited[srci] = true; for (int i = 0; i < _vertexs.size(); i++) { if (_matrix[srci][i] != MAX_W && !visited[i]) { _DFS(i, visited); } } } void DFS(const V &src) { size_t srci = GetVertexIndex(src); vector<bool> visited(_vertexs.size(), false); _DFS(srci, visited); cout << endl; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
测试结果
void test_matrix() { matrix::Graph<char, int, INT64_MAX, false> g("ABCDEFGHI", 9); g.addedge('A','B',1); g.addedge('A','C',1); g.addedge('A','D',1); g.addedge('B','E',1); g.addedge('B','C',1); g.addedge('C','F',1); g.addedge('D','F',1); g.addedge('E','G',1); g.addedge('F','H',1); g.addedge('H','I',1); g.Print(); g.DFS('A'); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16

5.3如何遍历不连通的图?

比如上面的图:
在进行图的遍历的时候,我们使用了一个遍历数组记录该顶点是否被遍历。
如何遍历不连通的图:在bool数组中寻找还没有遍历过的点进行遍历。
以上面的图为例:
void test_matrix() { matrix::Graph<char, int> g("ABCDEFGHI",9); g.addedge('A','B',1); g.addedge('A','D',1); g.addedge('B','E',1); g.addedge('E','G',1); g.addedge('C','F',1); g.addedge('F','H',1); g.addedge('H','I',1); g.BFS('A'); }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
广度优先遍历
void _BFS(size_t srci, vector<bool> &visited) { //遍历队列 queue<int> q; q.push(srci); visited[srci] = true; int n = _vertexs.size(); int num = 0; int size = 1; while (!q.empty()) { cout << "第" << num << "层:" << endl; for (int i = 0; i < size; i++) { int front = q.front(); q.pop(); cout << front << ":" << _vertexs[front] << " "; for (int i = 0; i < n; i++) { if (_matrix[front][i] != MAX_W && !visited[i]) { q.push(i); visited[i] = true; } } cout << endl; } num++; size = q.size(); } cout << endl; } void BFS(const V &src) { //标记数组 vector<bool> visited(_vertexs.size(), false); size_t srci = GetVertexIndex(src); _BFS(srci, visited); for (int i = 0; i < visited.size(); i++) { if (!visited[i]) { cout << endl; _BFS(i, visited); } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49

深度优先遍历
void _DFS(size_t srci, vector<bool> &visited) { cout << srci << ":" << _vertexs[srci] << " "; visited[srci] = true; for (int i = 0; i < _vertexs.size(); i++) { if (_matrix[srci][i] != MAX_W && !visited[i]) { _DFS(i, visited); } } } //非连通图的遍历 void DFS(const V &src) { size_t srci = GetVertexIndex(src); vector<bool> visited(_vertexs.size(), false); _DFS(srci, visited); for (int i = 0; i < visited.size(); i++) { if (!visited[i]) { cout << endl; _DFS(i, visited); } } cout << endl; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28

-
相关阅读:
显示DataFrame中每行(或列)中,每个位置以前出现过的最小值:cummin()函数
17:57:54.359 [main] WARN com.baomidou.mybatisplus.generator.IDatabaseQuery$D
YB2419是一款功能齐备,内置mos100%占空比高效率同步降压IC
RepGhost 解析
微星如何于BIOS中开启/关闭AMD虚拟化技术
JS高级 之 ES6~ES13 新特性
pytest脚本常用的执行命令
Transformers
强化学习:实现了基于蒙特卡洛树和策略价值网络的深度强化学习五子棋(含码源)
架构:微服务网关(SIA-Gateway)简介
- 原文地址:https://blog.csdn.net/qq_53893431/article/details/128135395
