-
【生成式网络】入门篇(五):Pix2Pix 的 代码和结果记录
原理参考 https://zhuanlan.zhihu.com/p/464673225
代码参考自 https://github.com/LibreCV/blog/blob/master/_notebooks/2021-02-13-Pix2Pix%20explained%20with%20code.ipynbimport os # os.chdir(os.path.dirname(__file__)) import torch import torch.nn as nn from torch.utils.data import DataLoader, Dataset import torch.nn.functional as F import torchvision from torchvision import transforms from torchvision import datasets from torchvision import models from torch.utils.tensorboard import SummaryWriter import numpy as np from PIL import Image import argparse from glob import glob import random import itertools sample_dir = 'samples_pix2pix' if not os.path.exists(sample_dir): os.makedirs(sample_dir, exist_ok=True) writer = SummaryWriter(sample_dir) device = torch.device('cuda' if torch.cuda.is_available() else 'cpu') np.random.seed(0) torch.manual_seed(0) class DownSampleConv(nn.Module): def __init__(self, in_channels, out_channels, kernel=4, strides=2, padding=1, activation=True, batchnorm=True): """ Paper details: - C64-C128-C256-C512-C512-C512-C512-C512 - All convolutions are 4×4 spatial filters applied with stride 2 - Convolutions in the encoder downsample by a factor of 2 """ super().__init__() self.activation = activation self.batchnorm = batchnorm self.conv = nn.Conv2d(in_channels, out_channels, kernel, strides, padding) if batchnorm: self.bn = nn.BatchNorm2d(out_channels) if activation: self.act = nn.LeakyReLU(0.2) def forward(self, x): x = self.conv(x) if self.batchnorm: x = self.bn(x) if self.activation: x = self.act(x) return x class UpSampleConv(nn.Module): def __init__( self, in_channels, out_channels, kernel=4, strides=2, padding=1, activation=True, batchnorm=True, dropout=False ): super().__init__() self.activation = activation self.batchnorm = batchnorm self.dropout = dropout self.deconv = nn.ConvTranspose2d(in_channels, out_channels, kernel, strides, padding) if batchnorm: self.bn = nn.BatchNorm2d(out_channels) if activation: self.act = nn.ReLU(True) if dropout: self.drop = nn.Dropout2d(0.5) def forward(self, x): x = self.deconv(x) if self.batchnorm: x = self.bn(x) if self.dropout: x = self.drop(x) return x class Generator(nn.Module): def __init__(self, in_channels, out_channels): """ Paper details: - Encoder: C64-C128-C256-C512-C512-C512-C512-C512 - All convolutions are 4×4 spatial filters applied with stride 2 - Convolutions in the encoder downsample by a factor of 2 - Decoder: CD512-CD1024-CD1024-C1024-C1024-C512 -C256-C128 """ super().__init__() # encoder/donwsample convs self.encoders = [ DownSampleConv(in_channels, 64, batchnorm=False), # bs x 64 x 128 x 128 DownSampleConv(64, 128), # bs x 128 x 64 x 64 DownSampleConv(128, 256), # bs x 256 x 32 x 32 DownSampleConv(256, 512), # bs x 512 x 16 x 16 DownSampleConv(512, 512), # bs x 512 x 8 x 8 DownSampleConv(512, 512), # bs x 512 x 4 x 4 DownSampleConv(512, 512), # bs x 512 x 2 x 2 DownSampleConv(512, 512, batchnorm=False), # bs x 512 x 1 x 1 ] # decoder/upsample convs self.decoders = [ UpSampleConv(512, 512, dropout=True), # bs x 512 x 2 x 2 UpSampleConv(1024, 512, dropout=True), # bs x 512 x 4 x 4 UpSampleConv(1024, 512, dropout=True), # bs x 512 x 8 x 8 UpSampleConv(1024, 512), # bs x 512 x 16 x 16 UpSampleConv(1024, 256), # bs x 256 x 32 x 32 UpSampleConv(512, 128), # bs x 128 x 64 x 64 UpSampleConv(256, 64), # bs x 64 x 128 x 128 ] self.decoder_channels = [512, 512, 512, 512, 256, 128, 64] self.final_conv = nn.ConvTranspose2d(64, out_channels, kernel_size=4, stride=2, padding=1) self.tanh = nn.Tanh() self.encoders = nn.ModuleList(self.encoders) self.decoders = nn.ModuleList(self.decoders) def forward(self, x): skips_cons = [] for encoder in self.encoders: x = encoder(x) skips_cons.append(x) skips_cons = list(reversed(skips_cons[:-1])) decoders = self.decoders[:-1] for decoder, skip in zip(decoders, skips_cons): x = decoder(x) # print(x.shape, skip.shape) x = torch.cat((x, skip), axis=1) x = self.decoders[-1](x) # print(x.shape) x = self.final_conv(x) return self.tanh(x) class PatchGAN(nn.Module): def __init__(self, input_channels): super().__init__() self.d1 = DownSampleConv(input_channels, 64, batchnorm=False) self.d2 = DownSampleConv(64, 128) self.d3 = DownSampleConv(128, 256) self.d4 = DownSampleConv(256, 512) self.final = nn.Conv2d(512, 1, kernel_size=1) def forward(self, x, y): x = torch.cat([x, y], axis=1) x0 = self.d1(x) x1 = self.d2(x0) x2 = self.d3(x1) x3 = self.d4(x2) xn = self.final(x3) return xn def _weights_init(m): if isinstance(m, (nn.Conv2d, nn.ConvTranspose2d)): torch.nn.init.normal_(m.weight, 0.0, 0.02) if isinstance(m, nn.BatchNorm2d): torch.nn.init.normal_(m.weight, 0.0, 0.02) torch.nn.init.constant_(m.bias, 0) class ImageDataset(torch.utils.data.Dataset): def __init__(self, root, transforms=None, unaligned=False, mode='train'): self.transforms = transforms self.unaligned = unaligned self.files_A = sorted(glob(os.path.join(root, mode, 'A', '*.*'))) self.files_B = sorted(glob(os.path.join(root, mode, 'B', '*.*'))) def __getitem__(self, idx): img = Image.open(self.files_A[idx % len(self.files_A)]).convert('RGB') itemA = self.transforms(img) if self.unaligned: rand_idx = random.randint(0, len(self.files_B)-1) img = Image.open(self.files_B[rand_idx]).convert('RGB') itemB = self.transforms(img) else: img = Image.open(self.files_B[idx % len(self.files_B)]).convert('RGB') itemB = self.transforms(img) return { 'A' : itemA, 'B' : itemB } def __len__(self): return max(len(self.files_A), len(self.files_B)) def denorm(x): out = (x+1)/2 return out.clamp(0, 1) # Losses adv_criterion = nn.BCEWithLogitsLoss() recon_criterion = nn.L1Loss() lambda_recon = 200 n_epochs = 200 display_step = 100 batch_size = 4 lr = 0.0002 target_size = 256 input_size = 256 dataroot = 'data/cycle_gan/datasets/facades' input_nc = 3 output_nc = 3 G = Generator(input_nc, output_nc).to(device) D = PatchGAN(input_nc + output_nc).to(device) G.apply(_weights_init) D.apply(_weights_init) optimG = torch.optim.Adam(G.parameters(), lr=lr) optimD = torch.optim.Adam(D.parameters(), lr=lr) # Dataset loader transforms_data = transforms.Compose([ transforms.Resize(int(input_size*1.12), Image.BICUBIC), transforms.RandomCrop(input_size), transforms.RandomHorizontalFlip(), transforms.ToTensor(), transforms.Normalize((0.5,0.5,0.5), (0.5,0.5,0.5)) ]) dataset = ImageDataset(dataroot, transforms=transforms_data, unaligned=False) dataloader = DataLoader(dataset, batch_size=batch_size, shuffle=True, num_workers=1, drop_last=True) ###### Training ###### cnt = 0 log_step = 10 for epoch in range(0, n_epochs): for i, batch in enumerate(dataloader): # set model input real = batch['A'].to(device) condition = batch['B'].to(device) # discriminator fake_images = G(condition).detach() fake_logits = D(fake_images, condition) real_logits = D(real, condition) fake_loss = adv_criterion(fake_logits, torch.zeros_like(fake_logits)) real_loss = adv_criterion(real_logits, torch.ones_like(real_logits)) d_loss = (real_loss + fake_loss) / 2 optimD.zero_grad() d_loss.backward() optimD.step() # generator fake_images = G(condition) disc_logits = D(fake_images, condition) adversarial_loss = adv_criterion(disc_logits, torch.ones_like(disc_logits)) # calculate reconstruction loss recon_loss = recon_criterion(fake_images, real) g_loss = adversarial_loss + lambda_recon * recon_loss optimG.zero_grad() g_loss.backward() optimG.step() cnt += 1 if cnt % log_step == 0: print('Epoch [{}/{}], Step [{}], g_loss: {:.4f}, d_loss: {:.4f}'.\ format(epoch, n_epochs, cnt, g_loss.item(), d_loss.item())) writer.add_scalar('g_loss', g_loss.item(), global_step=cnt) writer.add_scalar('d_loss', d_loss.item(), global_step=cnt) if cnt % 100 == 0: writer.add_images('real', denorm(real), global_step=cnt) writer.add_images('condition', denorm(condition), global_step=cnt) writer.add_images('fake_images', denorm(fake_images), global_step=cnt)- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
整体结构参考自Conditional GAN,把图像A作为condition出现在generator和discriminator里。
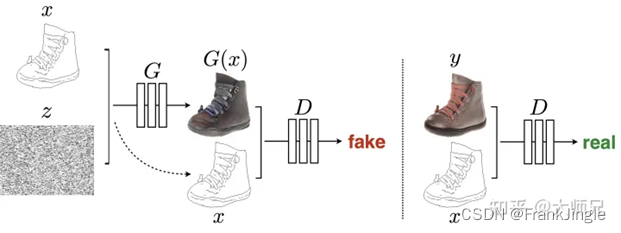
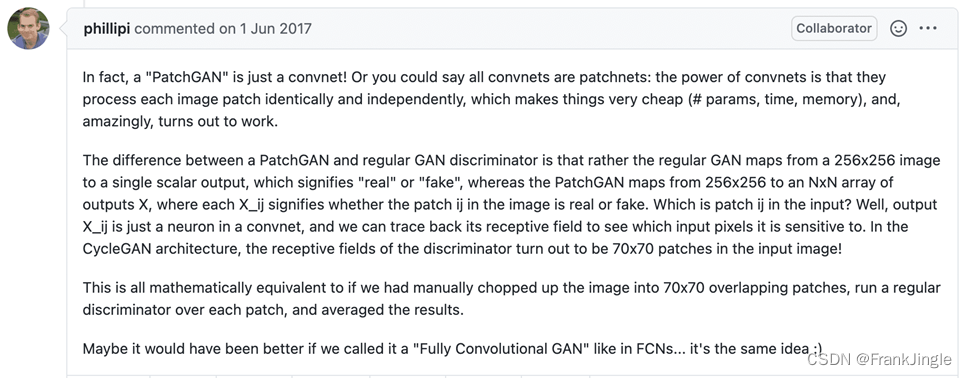
另外一个可以关注一下U-net结构的generator设计,和PatchGAN结构的 discriminator。具体解释可以看下图
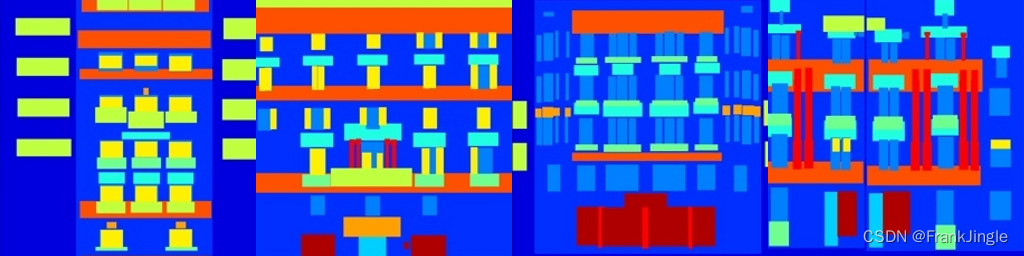
实验效果如下-
real image

-
condition image
-
generated image,效果很差,可能是没有训练到位,后续再调试吧

-
相关阅读:
jar打war包
JavaScript之“类的混入”
Pandas教程(非常详细)(第六部分)
python requests.post请求404问题
sqlserver==索引解析,执行计划,索引大小
【Algorithm】GPLT L3-020 至多删三个字符
产品说明丨如何使用MobPush快速创建应用
【Unittest】Requests实现小程序项目接口测试
当数字孪生与智慧园区结合,能够实现什么样的应用?
苍穹外卖集成 Apache POI Java实现Excel文件的读写下载
- 原文地址:https://blog.csdn.net/fangjin_kl/article/details/128122432
