-
(4)点云数据处理学习——其它官网例子
1、主要参考
(1)视频,大佬讲的就是好啊
【Open3D】三维点云python教程_哔哩哔哩_bilibili
(2)官方的github地址
GitHub - isl-org/Open3D: Open3D: A Modern Library for 3D Data Processing
(3)作者
@article{Zhou2018, author = {Qian-Yi Zhou and Jaesik Park and Vladlen Koltun}, title = {{Open3D}: {A} Modern Library for {3D} Data Processing}, journal = {arXiv:1801.09847}, year = {2018}, }(4)尤其注意,文档地址
Open3D: A Modern Library for 3D Data Processing — Open3D 0.16.0 documentation
2、相关模块
(1)Open3D-ML,一个机器学习的包
3、各类官方例子
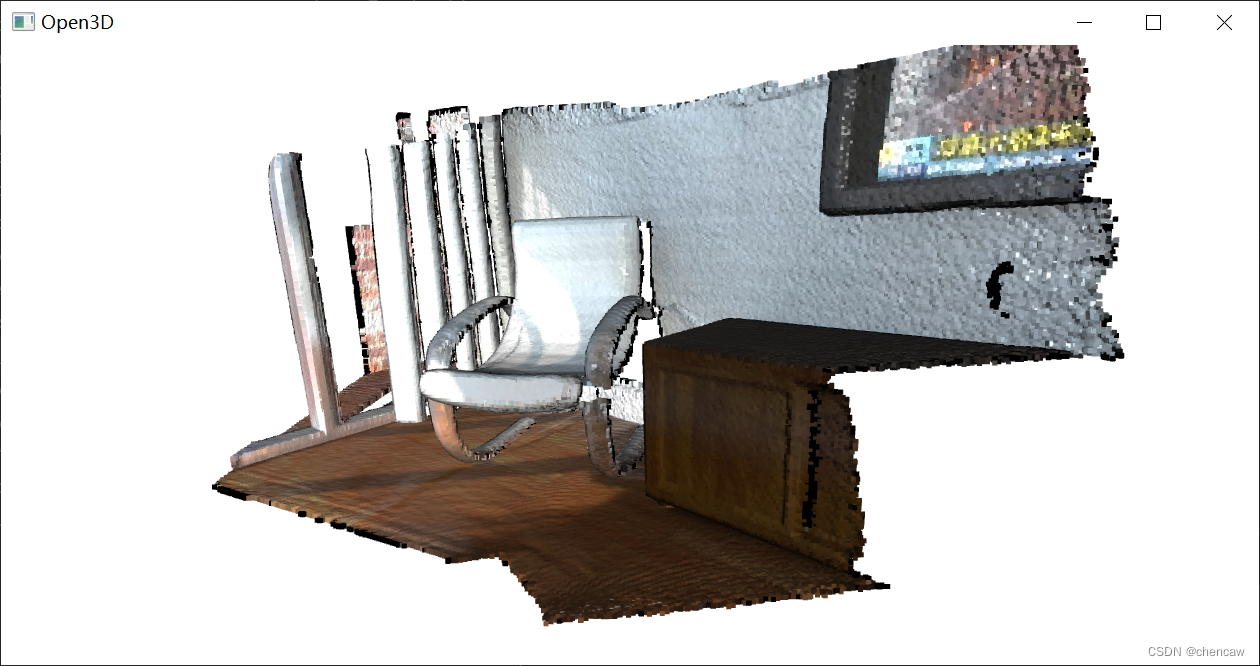
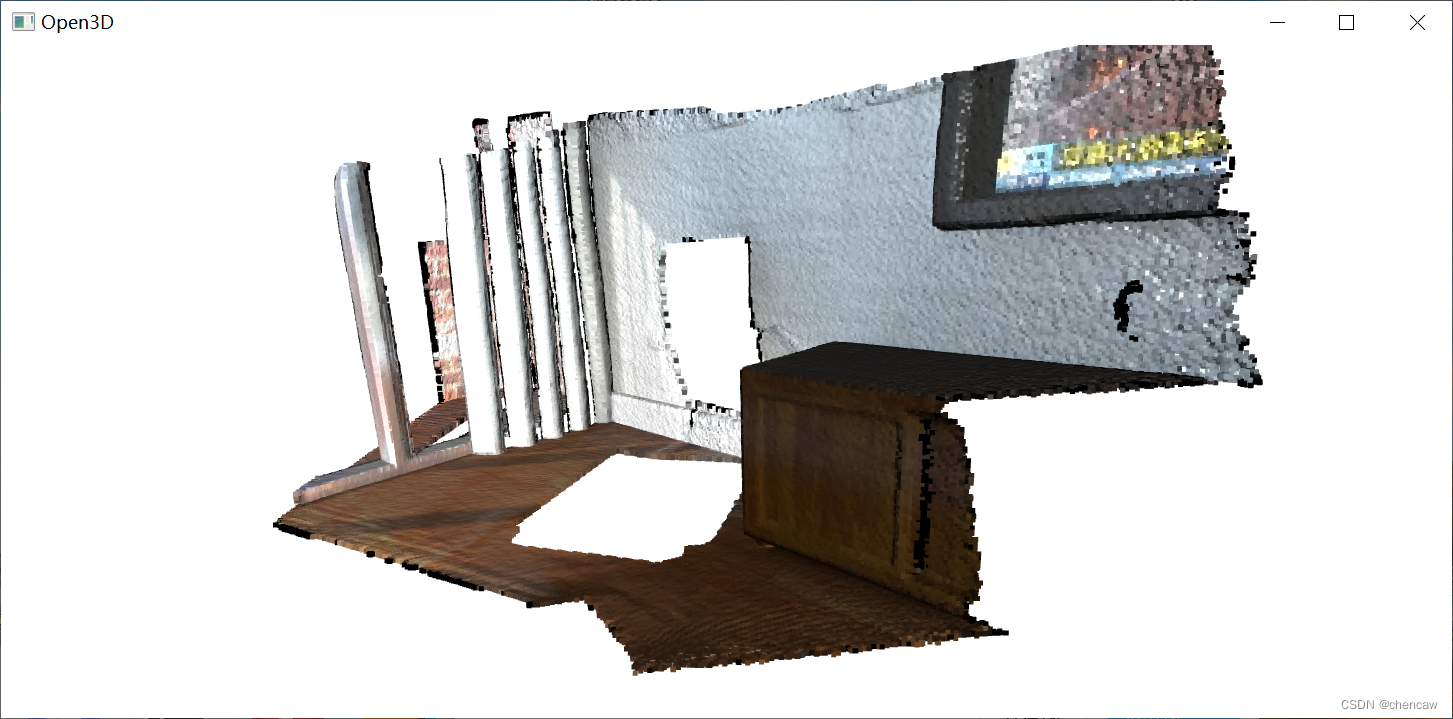
3.1打开椅子fragment.ply并显示
注意,运行下面程序后会自动下载相应的fragment.ply文件
(1)代码
- import open3d as o3d
- import numpy as np
- print("Load a ply point cloud, print it, and render it")
- ply_point_cloud = o3d.data.PLYPointCloud()
- pcd = o3d.io.read_point_cloud(ply_point_cloud.path)
- # 或者你有文件了
- # path = "D:/RGBD_CAMERA/python_3d_process/fragment.ply"
- # pcd = o3d.io.read_point_cloud(path) # path为文件路径
- print(pcd)
- print(np.asarray(pcd.points))
- o3d.visualization.draw_geometries([pcd],
- zoom=0.3412,
- front=[0.4257, -0.2125, -0.8795],
- lookat=[2.6172, 2.0475, 1.532],
- up=[-0.0694, -0.9768, 0.2024])
(2)显示结果
注意:按键盘+或者-可以修改点云大小,鼠标可以转动角度
3.2下采样downsampling
3.2.1包围盒下采样
(1)函数,参数应该就包围盒的大小(体素)
voxel_down_sample(voxel_size=0.05)
(2)说明
体素下采样使用常规体素网格从输入点云创建统一的下采样点云。它经常被用作许多点云处理任务的预处理步骤。该算法分为两个步骤:
1.点被装入体素中。
2.每个体素通过计算体素内部所有点的平均来生成一个点。
(3)测试代码
- import open3d as o3d
- import numpy as np
- # print("Load a ply point cloud, print it, and render it")
- # ply_point_cloud = o3d.data.PLYPointCloud()
- # pcd = o3d.io.read_point_cloud(ply_point_cloud.path)
- # 或者你有文件了
- path = "D:/RGBD_CAMERA/python_3d_process/fragment.ply"
- pcd = o3d.io.read_point_cloud(path) # path为文件路径
- print(pcd)
- #--------------------------------------------------------
- #(例子一)显示
- #---------------------------------------------------------
- # print(pcd)
- # print(np.asarray(pcd.points))
- # o3d.visualization.draw_geometries([pcd],
- # zoom=0.3412,
- # front=[0.4257, -0.2125, -0.8795],
- # lookat=[2.6172, 2.0475, 1.532],
- # up=[-0.0694, -0.9768, 0.2024])
- #--------------------------------------------------------
- #(例子二)下采样
- #---------------------------------------------------------
- downpcd = pcd.voxel_down_sample(voxel_size=0.05)
- # downpcd = pcd.voxel_down_sample(voxel_size=0.5)
- print(downpcd)
- o3d.visualization.draw_geometries([downpcd],
- zoom=0.3412,
- front=[0.4257, -0.2125, -0.8795],
- lookat=[2.6172, 2.0475, 1.532],
- up=[-0.0694, -0.9768, 0.2024])
(4)测试结果
1)0.05
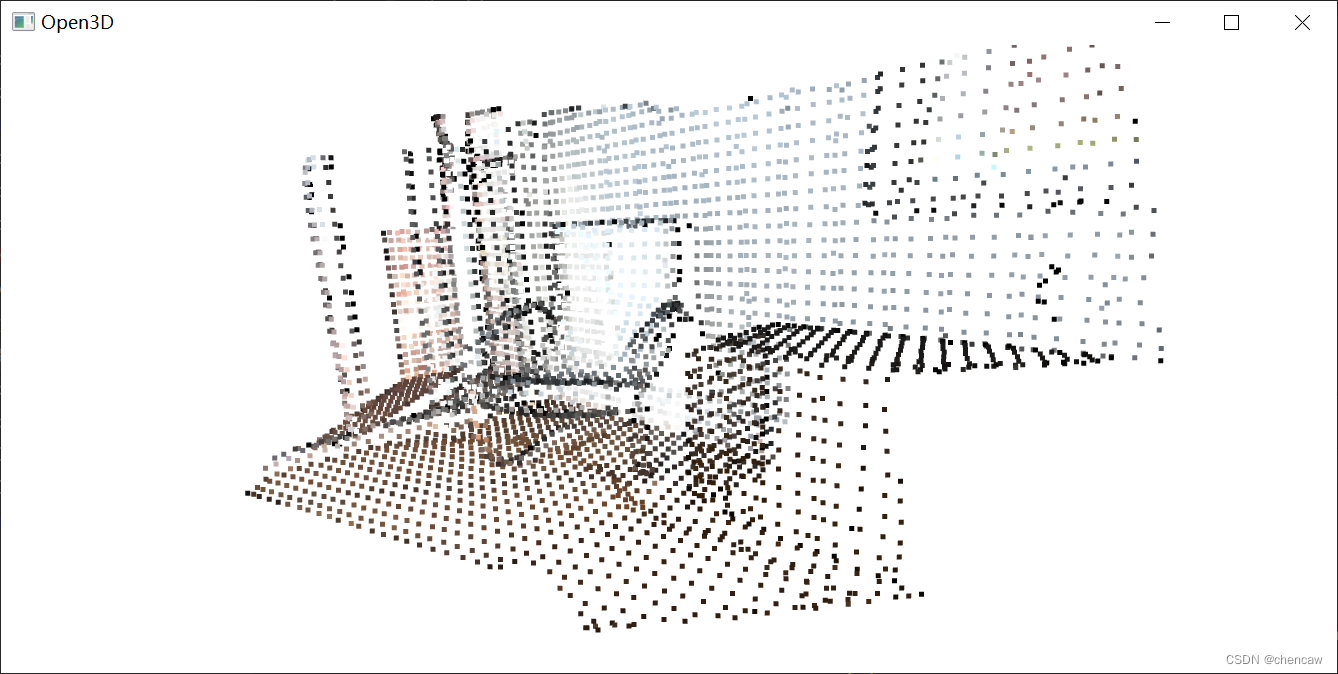
采样前后的数据
PointCloud with 196133 points.
PointCloud with 4718 points.2)0.5
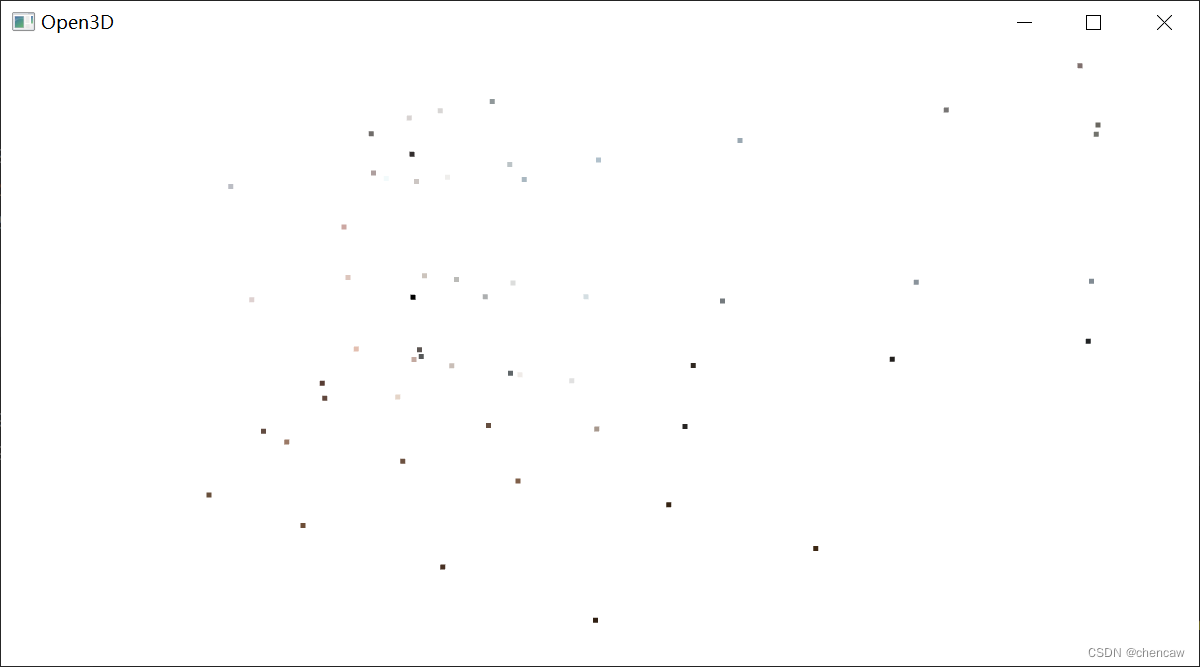
采样前后的数据
PointCloud with 196133 points.
PointCloud with 58 points.3.3定点法向量估计
(1)测试代码
- import open3d as o3d
- import numpy as np
- # print("Load a ply point cloud, print it, and render it")
- # ply_point_cloud = o3d.data.PLYPointCloud()
- # pcd = o3d.io.read_point_cloud(ply_point_cloud.path)
- # 或者你有文件了
- path = "D:/RGBD_CAMERA/python_3d_process/fragment.ply"
- pcd = o3d.io.read_point_cloud(path) # path为文件路径
- print(pcd)
- #--------------------------------------------------------
- #(例子一)显示
- #---------------------------------------------------------
- # print(pcd)
- # print(np.asarray(pcd.points))
- # o3d.visualization.draw_geometries([pcd],
- # zoom=0.3412,
- # front=[0.4257, -0.2125, -0.8795],
- # lookat=[2.6172, 2.0475, 1.532],
- # up=[-0.0694, -0.9768, 0.2024])
- #--------------------------------------------------------
- #(例子二)下采样
- #---------------------------------------------------------
- downpcd = pcd.voxel_down_sample(voxel_size=0.05)
- # # downpcd = pcd.voxel_down_sample(voxel_size=0.5)
- # print(downpcd)
- # o3d.visualization.draw_geometries([downpcd],
- # zoom=0.3412,
- # front=[0.4257, -0.2125, -0.8795],
- # lookat=[2.6172, 2.0475, 1.532],
- # up=[-0.0694, -0.9768, 0.2024])
- #--------------------------------------------------------
- #(例子三)定点法向量估计
- #---------------------------------------------------------
- print("Recompute the normal of the downsampled point cloud")
- downpcd.estimate_normals(
- search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=0.1, max_nn=30))
- o3d.visualization.draw_geometries([downpcd],
- zoom=0.3412,
- front=[0.4257, -0.2125, -0.8795],
- lookat=[2.6172, 2.0475, 1.532],
- up=[-0.0694, -0.9768, 0.2024],
- point_show_normal=True)
- print("Print a normal vector of the 0th point")
- print(downpcd.normals[0])
- print("Print the normal vectors of the first 10 points")
- print(np.asarray(downpcd.normals)[:10, :])
(2)测试结果
注意:可以通过键盘上的按键N来回切换查看向量

3.4剪切点云数据
(1)两个主要函数
- read_selection_polygon_volume读取指定多边形选择区域的json文件。
- vol.crop_point_cloud (pcd)过滤掉点。只剩下椅子了。
(2)使用以下代码后会自动下载并解压2个文件

(3)测试代码如下
- import open3d as o3d
- import numpy as np
- #--------------------------------------------------------
- #(例子四)剪切点云
- #---------------------------------------------------------
- demo_crop_data = o3d.data.DemoCropPointCloud()
- pcd = o3d.io.read_point_cloud(demo_crop_data.point_cloud_path)
- vol = o3d.visualization.read_selection_polygon_volume(demo_crop_data.cropped_json_path)
- chair = vol.crop_point_cloud(pcd)
- o3d.visualization.draw_geometries([chair],
- zoom=0.7,
- front=[0.5439, -0.2333, -0.8060],
- lookat=[2.4615, 2.1331, 1.338],
- up=[-0.1781, -0.9708, 0.1608])
(4)测试结果如图

(5)使用本地文件的方法如下:
- import open3d as o3d
- import numpy as np
- #--------------------------------------------------------
- #(例子四)剪切点云
- #---------------------------------------------------------
- # demo_crop_data = o3d.data.DemoCropPointCloud()
- # pcd = o3d.io.read_point_cloud(demo_crop_data.point_cloud_path)
- # vol = o3d.visualization.read_selection_polygon_volume(demo_crop_data.cropped_json_path)
- # chair = vol.crop_point_cloud(pcd)
- # o3d.visualization.draw_geometries([chair],
- # zoom=0.7,
- # front=[0.5439, -0.2333, -0.8060],
- # lookat=[2.4615, 2.1331, 1.338],
- # up=[-0.1781, -0.9708, 0.1608])
- #--------------------------------------------------------
- #(例子四)剪切点云--使用本地
- #---------------------------------------------------------
- plypath = "D:/RGBD_CAMERA/python_3d_process/DemoCropPointCloud/fragment.ply"
- pcd = o3d.io.read_point_cloud(plypath) # path为文件路径
- jsonpath = "D:/RGBD_CAMERA/python_3d_process/DemoCropPointCloud/cropped.json"
- vol = o3d.visualization.read_selection_polygon_volume(jsonpath)
- chair = vol.crop_point_cloud(pcd)
- o3d.visualization.draw_geometries([chair],
- zoom=0.7,
- front=[0.5439, -0.2333, -0.8060],
- lookat=[2.4615, 2.1331, 1.338],
- up=[-0.1781, -0.9708, 0.1608])
(6)其中cropped.json的内容如下:
- {
- "axis_max" : 4.022921085357666,
- "axis_min" : -0.76341366767883301,
- "bounding_polygon" :
- [
- [ 2.6509309513852526, 0.0, 1.6834473132326844 ],
- [ 2.5786428246917148, 0.0, 1.6892074266735244 ],
- [ 2.4625790337552154, 0.0, 1.6665777078297999 ],
- [ 2.2228544982251655, 0.0, 1.6168160446813649 ],
- [ 2.166993206001413, 0.0, 1.6115495157201662 ],
- [ 2.1167895865303286, 0.0, 1.6257706054969348 ],
- [ 2.0634657721747383, 0.0, 1.623021658624539 ],
- [ 2.0568612343437236, 0.0, 1.5853892911207643 ],
- [ 2.1605399001237027, 0.0, 0.96228993255083017 ],
- [ 2.1956669387205228, 0.0, 0.95572746049785073 ],
- [ 2.2191318790575583, 0.0, 0.88734449982108754 ],
- [ 2.2484881847925919, 0.0, 0.87042807267013633 ],
- [ 2.6891234157295827, 0.0, 0.94140677988967603 ],
- [ 2.7328692490470647, 0.0, 0.98775740674840251 ],
- [ 2.7129337547575547, 0.0, 1.0398850034649203 ],
- [ 2.7592174072415405, 0.0, 1.0692940558509485 ],
- [ 2.7689216419453428, 0.0, 1.0953914441371593 ],
- [ 2.6851455625455669, 0.0, 1.6307334122162018 ],
- [ 2.6714776099981239, 0.0, 1.675524657088997 ],
- [ 2.6579576128816544, 0.0, 1.6819127849749496 ]
- ],
- "class_name" : "SelectionPolygonVolume",
- "orthogonal_axis" : "Y",
- "version_major" : 1,
- "version_minor" : 0
- }
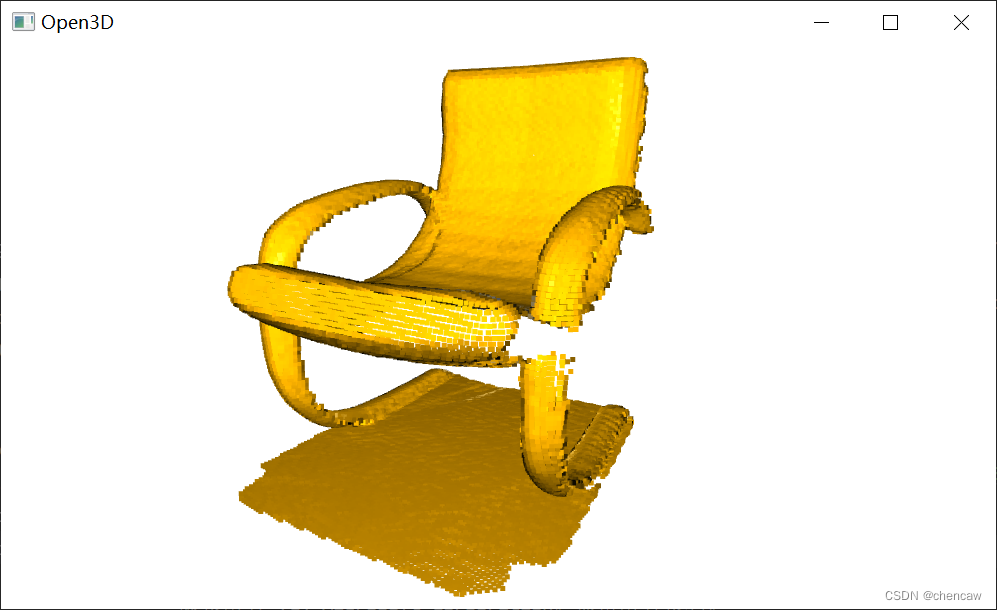
3.5 给点云上颜色
(1)参数,后面三个是RGB的颜色,取值都是0--1
paint_uniform_color([1, 0.706, 0])
(2)代码
- import open3d as o3d
- import numpy as np
- #--------------------------------------------------------
- #(例子四)剪切点云--使用本地
- #---------------------------------------------------------
- plypath = "D:/RGBD_CAMERA/python_3d_process/DemoCropPointCloud/fragment.ply"
- pcd = o3d.io.read_point_cloud(plypath) # path为文件路径
- jsonpath = "D:/RGBD_CAMERA/python_3d_process/DemoCropPointCloud/cropped.json"
- vol = o3d.visualization.read_selection_polygon_volume(jsonpath)
- chair = vol.crop_point_cloud(pcd)
- # o3d.visualization.draw_geometries([chair],
- # zoom=0.7,
- # front=[0.5439, -0.2333, -0.8060],
- # lookat=[2.4615, 2.1331, 1.338],
- # up=[-0.1781, -0.9708, 0.1608])
- print("Paint chair")
- chair.paint_uniform_color([1, 0.706, 0])
- o3d.visualization.draw_geometries([chair],
- zoom=0.7,
- front=[0.5439, -0.2333, -0.8060],
- lookat=[2.4615, 2.1331, 1.338],
- up=[-0.1781, -0.9708, 0.1608])
(3)测试结果
3.6点云距离测量
(1)函数
compute_point_cloud_distance
(2)说明
Open3D提供了compute_point_cloud_distance方法来计算从源点云到目标点云的距离。也就是说,它为源点云中的每个点计算到目标点云中最近点的距离。
(3)测试代码,(以下代码,找到距离大于椅子设定值的物体,如0.01或者0.2;起到了删除物体后剩余物体显示的功能)
- import open3d as o3d
- import numpy as np
- #--------------------------------------------------------
- #(例子四)剪切点云--使用本地
- #---------------------------------------------------------
- plypath = "D:/RGBD_CAMERA/python_3d_process/DemoCropPointCloud/fragment.ply"
- pcd = o3d.io.read_point_cloud(plypath) # path为文件路径
- jsonpath = "D:/RGBD_CAMERA/python_3d_process/DemoCropPointCloud/cropped.json"
- vol = o3d.visualization.read_selection_polygon_volume(jsonpath)
- chair = vol.crop_point_cloud(pcd)
- # 把和椅子的距离大于0.01的找出来
- dists = pcd.compute_point_cloud_distance(chair)
- dists = np.asarray(dists)
- ind = np.where(dists > 0.01)[0]
- # ind = np.where(dists > 0.2)[0]
- pcd_without_chair = pcd.select_by_index(ind)
- o3d.visualization.draw_geometries([pcd_without_chair],
- zoom=0.3412,
- front=[0.4257, -0.2125, -0.8795],
- lookat=[2.6172, 2.0475, 1.532],
- up=[-0.0694, -0.9768, 0.2024])
(4)测试结果
1)距离大于0.01(ind = np.where(dists > 0.01)[0])
 2)距离大于0.2(ind = np.where(dists > 0.2)[0])
2)距离大于0.2(ind = np.where(dists > 0.2)[0])
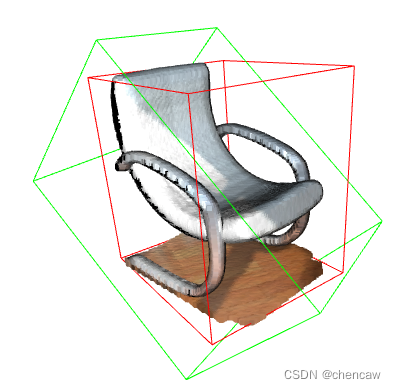
3.7 包围盒(Bounding volumes)
(1)函数
- get_axis_aligned_bounding_box -- 根据坐标获取物体的包围盒(x,y,z坐标方向)
- get_oriented_bounding_box -- 根据物体的角度获取物体的包围盒(可围着物体旋转)
PS:感觉有点像图像检测中的外接矩形(x,y坐标),最小外接矩形(围着物体可旋转),待验证。
(2)说明
点云的几何类型和Open3D中的所有其他几何类型一样具有边界卷。目前,Open3D实现了axisaligned dboundingbox和OrientedBoundingBox,它们也可用于裁剪几何图形。
(3)测试代码
- import open3d as o3d
- import numpy as np
- #--------------------------------------------------------
- #(例子四)剪切点云--使用本地
- #---------------------------------------------------------
- plypath = "D:/RGBD_CAMERA/python_3d_process/DemoCropPointCloud/fragment.ply"
- pcd = o3d.io.read_point_cloud(plypath) # path为文件路径
- jsonpath = "D:/RGBD_CAMERA/python_3d_process/DemoCropPointCloud/cropped.json"
- vol = o3d.visualization.read_selection_polygon_volume(jsonpath)
- chair = vol.crop_point_cloud(pcd)
- # 把和椅子的距离大于0.01的找出来
- aabb = chair.get_axis_aligned_bounding_box()
- aabb.color = (1, 0, 0)
- obb = chair.get_oriented_bounding_box()
- obb.color = (0, 1, 0)
- o3d.visualization.draw_geometries([chair, aabb, obb],
- zoom=0.7,
- front=[0.5439, -0.2333, -0.8060],
- lookat=[2.4615, 2.1331, 1.338],
- up=[-0.1781, -0.9708, 0.1608])
(4)测试结果
-
相关阅读:
springboot毕设项目贷款系统lr8iv(java+VUE+Mybatis+Maven+Mysql)
基于SpringBoot的网上订餐系统
Sentry安装配置与使用
更有仪式感的收纳工具,让生活有条有理,精臣B21智能标签机上手
OPNET Modeler 的安装及其相关配置
unet训练为什么报错IndexError: Target 7 is out of bounds.
Tableau常用可视化图形介绍及其适用场景
Dynamic Wallpaper v17.4 mac版 动态视频壁纸 兼容 M1/M2
ubuntu20.04官方安装I219-V驱动
[常用工具] Python视频处理库VidGear使用指北
- 原文地址:https://blog.csdn.net/chencaw/article/details/128108544