-
3D视觉应用案例:引导板件定位抓取
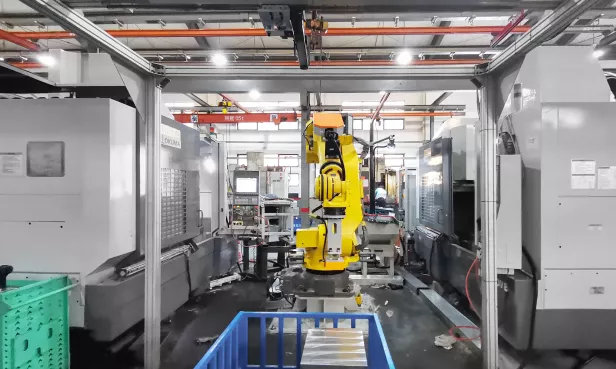
3D引导板件定位抓取
某知名模具钢材集团
项目背景
广州某知名模具钢材集团,需求3D引导板件定位抓取和2D识别信息获取功能。原场景用的桁车设备加人工搬运安全系数极低。
作业流程
• 3D相机视觉识别产品位置后,通过机器人电磁铁完成产品的抓取。
• 放置到二次定位工装前通过点激光和传感器检测产品规格;通过2D相机识别二维码贴图,用于区别产品的材质。
方案亮点
• 视觉算法:面对极高反光的工件,出现点云镜面反射,独特的视觉算法,降低反光对识别的影响。在点云相机成像效果不佳的情况下,也可以通过算法技术实现抓取。
• 点云聚类:产品众多,且规格差异较大的情况下,对于任意未知产品来料,使用了点云聚类技术,在解决客户项目难点的情况下降低项目成本。
• 集3D引导抓取和2D识别为一站:为了满足客户生产需求,为客户设计规划工作站集3D引导抓取和2D识别为一站,并新增了新增2D相机识别工件二维码贴图功能,极大提高了产线生产力。
• 夹具设计:采用电磁铁设计可以兼容多种型号产品,应对厚度差异较大和重量过重的产品,优秀的夹具设计完美适用。
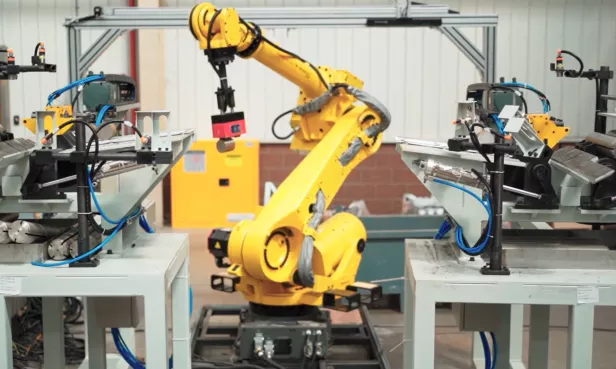
圆棒深筐无序拣选
某大型汽配厂
项目背景
客户为某知名外资汽车零部件企业,其位于西北的工厂需求3D视觉实现圆形棒材的上料自动化。圆棒以无序散乱姿态放置于深筐,表面反光,规格多样,需以特定姿态放置下游进行下一步工序。
作业流程
• 人工运送载有圆棒的料筐至机器人工作位,视觉定位料筐位置
• 视觉识别圆棒位姿,引导机器人完成无碰撞抓取
• 机器人将圆棒放置滑槽进行二次定位,再次抓取完成精准上料
• 重复上述动作直至清筐
方案亮点
• 采用XM-GX-L结构光相机,配有可滑动模组,可对双工位的堆叠圆棒进行高精度点云还原
• 视觉识别力强,自动计算无碰撞轨迹,解决圆棒竖放、角落抓取等难题,实现高效清筐
• 适配非标准长方体料筐,稳定抓取无碰撞
• 高兼容性夹具,适配多种规格圆棒,柔性拣选

卡钳上下料
某大型汽配厂
项目背景
客户为华东大型汽车零部件企业,需求3D视觉实现卡钳壳体的自动上下料。卡钳壳体为异形铸件,正反相扣逐层平铺放置于深筐。工件正反相似度高,易互嵌,反面工件需识别放置翻转工装上。工件及托盘均存在一定程度的倾斜。卡钳壳体经加工,工件表面可能残留部分切削液,需重新逐层放置料筐下料。
作业流程
• 料筐就位,视觉识别卡钳位姿并区分正反,引导机器人抓取放置至对应工装台
• 每层清空后,视觉引导快换抓取托盘,进行下一层上料,直至清筐
• 工件加工完成,视觉引导机器人放置托盘,快换夹具后定位格口引导机器人下料
• 每层下料完成,重复新一层托盘放置与下料动作,直至最终完成
方案亮点
• 上料视觉采用XM-GX-L相机,安装移动模组上,可对料筐、倾斜卡钳、黑色托盘进行高精准的3D位姿识别
• 下料视觉采用XM-SP-L相机,安装移动模组上,可对料筐、放置格口位置进行±3mm精准识别
• 自动计算无碰撞轨迹,解决角落工件抓取难题
• 快换夹具设计,兼容多种规格工件及托盘的抓取

飞轮壳上下料
某大型汽配厂
项目背景
客户为西南某大型汽车零部件制造及总成厂商,需求借助3D视觉配合打磨机床作业,实现自动抓取上料以及定位下料。来料为深筐逐层平铺的铝合金铸造件,结构复杂,并存在一定程度的倾斜,抓取后下游需配合精准的激光打标,视觉位姿精度要求高。
作业流程
• 人工放置料筐就位后,视觉拍照识别料筐及工件位姿,引导机器人完成深筐抓取
• 视觉二次精准定位工件位姿,配合完成激光打标,并放置机床进行打磨、清洗、翻转、烘干等一系列工序
• 每层工件清空后,视觉引导抓取隔板,继续下一层工件的上料,直至最终清筐
• 工件加工完成,机器人取料,视觉定位放置位姿,引导机器人完成下料
方案亮点
• 采用XM-SP-L大视野相机,可对工件、料筐、隔板进行识别定位,稳定抓取实现100%清筐
• 视觉二次精准定位,精度±1mm,满足打标需求
• 视觉拍照成品工件下料区,定位放置位姿,引导无碰撞准确下料
-
相关阅读:
Linux内核4.14版本——I2C子系统(4)_I2C示例(i2c-designware-platdrv.c和at24.c)
metrics server request failed - “403 Forbidden“
保护服务器免受攻击:解析攻击情境与解决之道
vue3—elementPlus如何单独修改页面中的某个下拉框样式
渗透测试-C段主机信息收集
面了个腾讯拿38K跳槽出来的,见识到了真正的测试天花板
SLAM实现模块及功能
【vue例子】vue实现侧边栏点击top,动画滚动到顶端
牧场系统设计与实现-计算机毕业设计源码+LW文档
探索AudioLM的音频源识别能力:解锁声音的奥秘
- 原文地址:https://blog.csdn.net/YEYUANGEN/article/details/128095021