-
RationalDMIS2022车削件(轴类)测量:回转体检测
1.坐标系知识
在三坐标测量机的使用中,坐标系的建立是最为关键的一步,是工件测量的基本依据。设备在组装本身中有着XYZ三个互相垂直的坐标轴,因此坐标系的建立便是通过以工件上的特征作为依据建立XYZ三个互相垂直的坐标轴与设备的坐标轴进行对应,从而使程序得以运行。
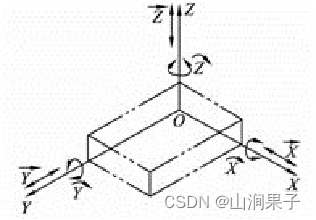
物体在空间中自由运动大致分解为6个自由度,分别为沿X轴平移、绕X轴旋转、沿Y轴平移、绕Y轴旋转、沿Z轴平移、绕Z轴旋转。建立坐标系则需要限制物体在空间中的自由运动,也就是说需要限制6个自由度。

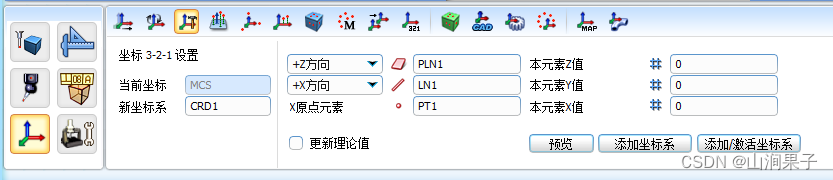
在测量软件中,则把建坐标系分成3步:
1.零件找正
测量平面,找正零件,即确定第一轴线。选择垂直于零件轴线的平面而不是选择垂直于机器坐标轴的平面。零件找正步骤中一般可以限制2个轴的旋转,限制的轴由选定的平面所在工作平面而定。
2.旋转轴
旋转轴也就是确定第二轴线,需要先确定第一轴线,也就是先进行零件找正后才能进行旋转轴步骤。该步骤可以把剩余的第三个轴的旋转进行限制。但个别零件,如缺乏端面参照的轴类零件则不需要进行旋转轴。
3.设置原点
最后一步设置原点,则是限制XYZ三个方向的平移,把零点位置固定在工件上的特征位置上。
特征有着不同的特性,如平面可以作为零件找正,限制2个轴的旋转,在已经使用其他特征零件找正后,也可以作为旋转轴,同时可以作为零点限制一个方向的平面;而2D直线则无法进行零件找正,但可以进行旋转轴及一个方向的原点设置;点只能作为一个方向的原点,而圆则可以作为两个方向的原点,球体则可以限制3个方向平移等。最后总结出下表:矢量的应用场合——在零件坐标系的建立:在建立零件坐标系时,必须使用零件的基准特
-
相关阅读:
vue-计算属性:computed
STM32GPIO有几种模式,
一、入行程序员的一波三折
【计算机思维】01.计算机思维框架
深度干货 | 38道Java基础面试题 (1.2W字详细解析)
垂直分表为什么能够加快查询效率?
[PHP毕业设计源码]精品基于PHP实现的美食菜谱网站[包运行成功]
获取HTML元素的offsetParent属性
EF Core 的 Code First 模式
vscode 导入自定义包报错 ModuleNotFoundError: No module named xxx方法合集
- 原文地址:https://blog.csdn.net/weixin_43911798/article/details/128100228