-
基于遗传算法的PID控制器增益的实现(Matlab代码实现)
👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
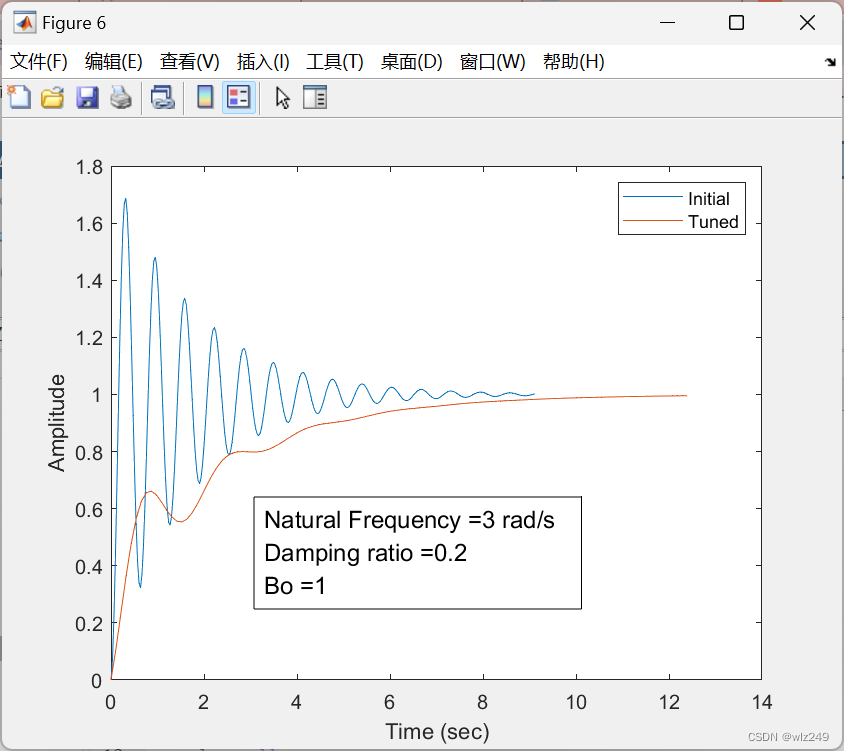
本文利用遗传算法 (GA) 实现,用于调整 PID 控制器的增益。 的重点是无人机(UAV)上使用的PID控制器。模拟二阶系统的动力学。调优基于满意度等标准。
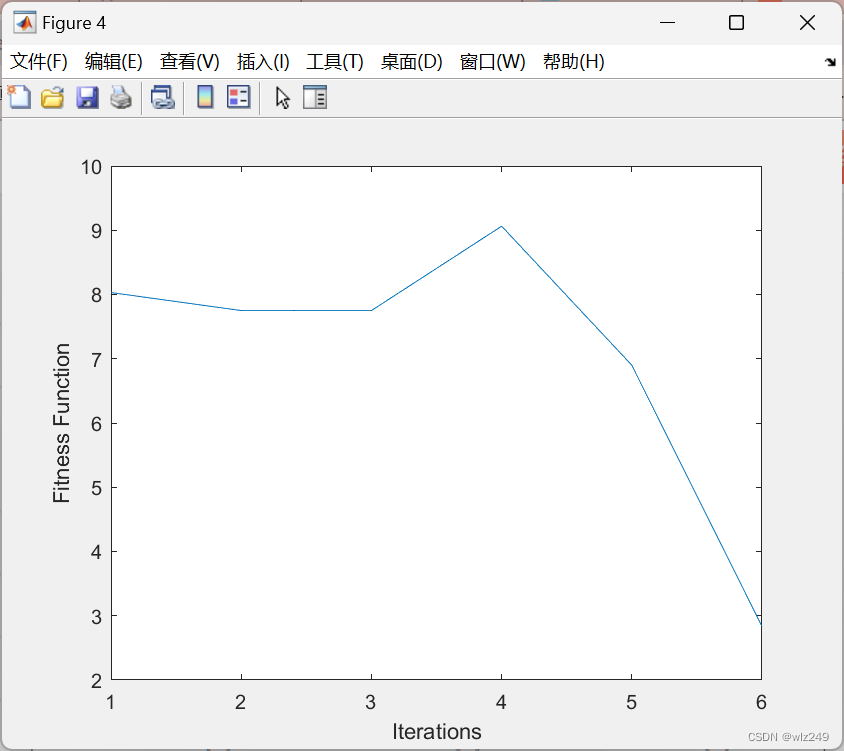
📚2 运行结果



部分代码:
clear all;
clc;% Values of damping, natural frequency and SS gain
damping_ratio = (2:8)/10;
natural_freq = (3:10);
b0 = 1;%variables used to selected different frequency/damping values
i = 1; % natural frequency
j = 1; % damping ratio% Calculating the values of the nominator and denominator of the TF
a = b0*(natural_freq(i)^2);
b = 2*natural_freq(i)*damping_ratio(j);
c = natural_freq(i)^2;k =1;
%Simulink model required
model = 'reference_tracking';
load_system(model)max_prop_gain = 1;
max_int_gain = 1;
% kp_initial = rand*max_prop_gain;
% ki_initial = rand*max_int_gain;
kp_initial = 3;
ki_initial = 3;%population creation
gains = [ kp_initial ki_initial;
0.5*kp_initial ki_initial;
kp_initial 0.5*ki_initial;
0.5*kp_initial 0.5*ki_initial
2*kp_initial 2*ki_initial];disp(gains);
kp = kp_initial;
ki = ki_initial;kp_p1 = num2str(kp);
ki_p2 = num2str(ki);
s_kp_p1 = strcat('Initial P Gain: ', kp_p1);
s_ki_p2 = strcat('Initial I Gain: ',ki_p2);
initial_gains = [s_kp_p1 char(10) s_ki_p2]; % textbox element🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]杨黎明. 一种改进的免疫遗传算法及在PID控制器优化设计中的应用[D].中南大学,2007.
🌈4 Matlab代码实现
-
相关阅读:
windows 定制 terminal 上手实践
蓝桥杯模拟赛:最远滑行距离 ← dfs
数据结构与算法初体验
【***操作系统---第三章***】
计算机毕业设计springboot教学物资管理系统f1v89源码+系统+程序+lw文档+部署
Linux 系统之 CentOS 和 Ubuntu 的区别
计算机组成原理学习笔记(1.计算机系统概述 2.数据的表示和运算)
城市旅游景点信息交流平台的设计与实现 毕业设计-附源码290915
模型层知识点补充
Eclipse配置Tomcat教程+创建第一个Java Web程序
- 原文地址:https://blog.csdn.net/weixin_46039719/article/details/128044379