-
牛顿法(牛顿拉夫逊)配电网潮流计算matlab程序
牛顿法配电网潮流计算matlab程序
传统牛顿—拉夫逊算法,简称牛顿法,是将潮流计算方程组F(X)=0,进行泰勒展开。因泰勒展开有许多高阶项,而高阶项级数部分对计算结果影响很小,当忽略一阶以上部分时,可以简化对方程的求解计算。当忽略一阶以上部分后,牛顿法的求解过程实质是逐次线性化,这是反复形成、求解修正方程的过程[16]。其方程式如下:

(18)
在公式(18)中,和分别表示状态变量与其修正量组成的列向量;为方阵,一般叫作雅可比矩阵,第i行j列元素为 ,它的大小为第i个函数对第j个变量求偏导;k则表示阵元素都在处取;同时,F(X)是由n个函数组成的n维列向量;在极坐标下,节点电压可如下表示:

(19)
若和为已知大小的功率,与从节点电压求得的有功和无功功率之差,为功率的不平衡量,则节点功率不平衡量可用如下公式计算:

(20)
节点功率可用各节点电压模值与相位表示,如下公式所示:

(21)
式(21)中,为节点i和j的相位差。
由以公式(18)-(21)推得牛顿法下,其潮流计算方程可写为:

(22)
公式(22)中,雅可比矩阵的各元素为
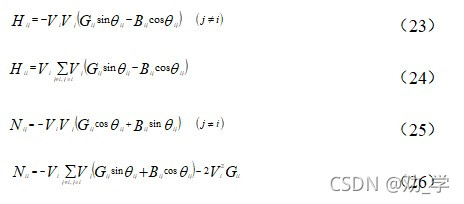
(23)
(24)
(25)
(26)
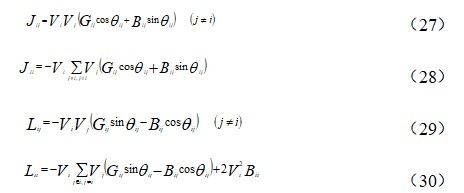
(27)
(28)
(29)
(30)
其中,节点导纳矩阵的元素由Gij 、Bij表示。
随着国内外配电系统自动化水平不断提高,电力行业人员也开始更加深入地研究配电网系统。配电网潮流计算作为DMS(配电管理系统)的重要基础,受到广大行业界人士的关注。因此,配电网潮流计算,已然成为配电网分析的重要内容。配电网与输电网相比,两者有明显不同,前者一般采用网格结构,线路参数R/X的值较大,三相负荷不对称程度明显。这些特点使得在输电网中计算有效,如牛顿法,不再适用于配电网。为此,有学者提出了适用于配电网的潮流算法,主要包括基于回路方程的潮流算法、前推回推法和改进的牛顿-拉夫逊法[17](简称改进的牛拉法)。其中,基于回路方程的方法具有较强的网格处理能力和良好的收敛性,但该方法的节点数和分支数处理非常复杂。前推回推法是针对配电网的树状特性,可以避免潮流计算中的病态条件,同时速度更快。然而,由于其公式和算法与牛顿潮流算法不同,其在其它方面(如潮流优化)的应用将受到限制。
改进牛顿法通过对传统法进行一定的近似,将J阵写成UDUT 的形式。U仅由网络拓扑决定,是一个上三角矩阵;D是一个对角矩阵。在牛拉法中,需要对J阵因子分解与前代回代,改进法则只有前推回代的计算过程。它很好地改善了传统法以及前推回推法。经过算例计算结果证明,改进法可以避免J阵病态,且拥有前推回代法的收敛速度、精度,又由于它属于牛顿型算法,所以该算法已经得到了广泛的运用[18]。下面附带电力系统分析牛顿法算例及matlab程序:
网络结构如下: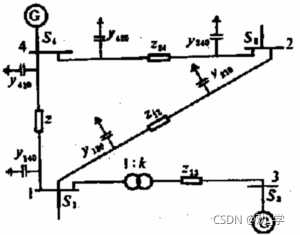
系统参数如下:
在上图所示的简单电力系统中,系统中节点1、2为PQ节点,节点3为PV节点,节点4为平衡节点,已给定P1s+jQ1s=-0.30-j0.18 P2s+jQ2s=-0.55-j0.13 P3s=0.5 V3s=1.10 V4s=1.05∠0°
容许误差ε=10-5
节点导纳矩阵:

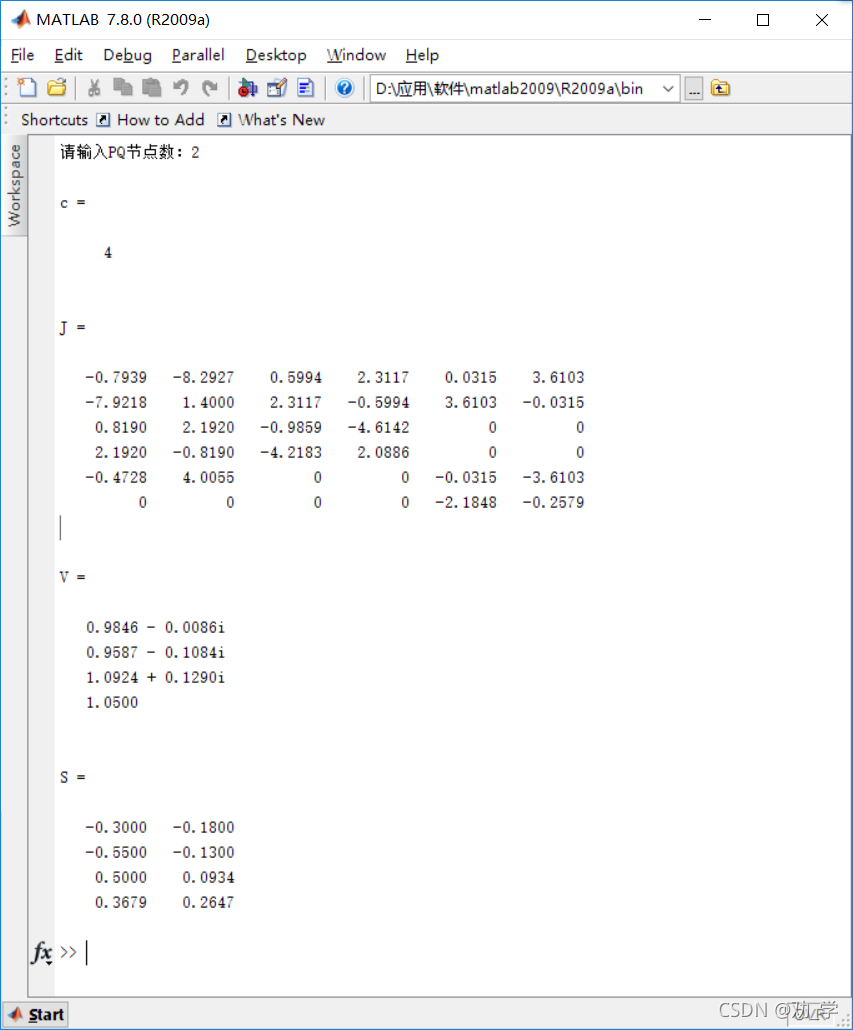
各节点电压:
节点 e f v ζ
1.0.984637 -0.008596 0.984675 -0.500172
2.0.958690 -0.108387 0.964798 -6.450306
3.1.092415 0.128955 1.100000 6.732347
4.1.050000 0.000000 1.050000 0.000000各节点功率:
节点 P Q
1-0.300000 -0.180000
2–0.550000 -0.130000
3 0.500000 -0.551305
4 0.367883 0.264698matlab程序如下:
// 牛顿法潮流计算matlab程序 clc; Y=[1.042093-8.242876i -0.588235+2.352941i 3.666667i -0.453858+1.891074i; -0.588235+2.352941i 1.069005-4.727377i 0 -0.480769+2.403846i; 3.666667i 0 -3.333333i 0; -0.453858+1.891074i -0.480769+2.403846i 0 0.934627-4.261590i]; %导纳矩阵 e=[1 1 1.1 1.05];%初始电压 f=zeros(4,1); V=zeros(4,1);%节点电压 Ws=[-0.3 ; -0.18 ; -0.55 ; -0.13 ; 0.5 ; 1.1];%初始功率 W=zeros(6,1); n=length(Y);%节点数 J=zeros(2*(n-1));%雅可比矩阵 delta_v=zeros(1,6); delta_w=Ws; G=real(Y); B=imag(Y); S=zeros(4,2); c=0;%循环次数 m=input('请输入PQ节点数:'); while max(abs(delta_w))>10^-5 for i=1:(n-1)%以下为求取雅可比矩阵 for j=1:(n-1) if (i~=j) J(2*i-1,2*j-1)=-(G(i,j)*e(i)+B(i,j)*f(i)); J(2*i,2*j)=-J(2*i-1,2*j-1); J(2*i-1,2*j)=B(i,j)*e(i)-G(i,j)*f(i); J(2*i,2*j-1)=J(2*i-1,2*j); end end end for j=1:(n-2) J(6,2*j-1)=0; J(6,2*j)=0; end%以上为非对角线元素 s1=0; s2=0; for i=1:(n-1) for j=1:n s1=s1+(G(i,j).*e(j)-B(i,j).*f(j)); s2=s2+(G(i,j).*f(j)+B(i,j).*e(j)); end J(2*i-1,2*i-1)=-s1-G(i,i) *e(i)-B(i,i)*f(i); J(2*i-1,2*i)=-s2+B(i,i) *e(i)-G(i,i)*f(i); s1=0; s2=0; end for i=1:m for j=1:n s1=s1+G(i,j).*f(j)+B(i,j).*e(j); s2=s2+(G(i,j).*e(j)-B(i,j).*f(j)); end J(2*i,2*i-1)=s1+B(i,i) *e(i)-G(i,i)*f(i); J(2*i,2*i)=-s2+G(i,i) *e(i)+B(i,i)*f(i); s1=0; s2=0; end J(6,5)=-2*e(3); J(6,6)=-2*f(3);%对角线元素求解 for i=1:m for j=1:n s1=s1+e(i)*(G(i,j).*e(j)-B(i,j).*f(j))+f(i)*(G(i,j).*f(j)+B(i,j).*e(j)); s2=s2+f(i)*(G(i,j).*e(j)-B(i,j).*f(j))-e(i)*(G(i,j).*f(j)+B(i,j).*e(j)); end delta_w(2*i-1)=Ws(2*i-1)-s1; delta_w(2*i)=Ws(2*i)-s2; W(2*i-1)=s1; W(2*i)=s2; s1=0; s2=0; end for j=1:n s1=s1+e(3)*(G(3,j).*e(j)-B(3,j).*f(j))+f(3)*(G(3,j).*f(j)+B(3,j).*e(j)); end delta_w(5)=Ws(5)-s1; delta_w(6)=(Ws(6)^2-(e(3)^2+f(3)^2)); W(5)=s1; W(6)=sqrt(e(3)^2+f(3)^2);%以上求功率差值 delta_v=-inv(J)*delta_w; for i=1:(n-1) e(i)=e(i)+delta_v(2*i-1); f(i)=f(i)+delta_v(2*i); end%求电压差值 c=c+1; end for x=1:4 V(x)=e(x)+f(x)*1i; end%节点电压 s1=0; for x=3:4 for j=1:4 s1=s1+conj(Y(x,j))*conj(V(j)); end S(x,1)=real(V(x)*s1); S(x,2)=imag(V(x)*s1); s1=0; end%PV与平衡节点功率 for x=1:2 S(x,1)=W(2*x-1); S(x,2)=W(2*x); end%节点功率 c J V S- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
运行结果如下:
-
相关阅读:
Linux上部署Jupyter notebook
OpenXR手部追踪实现详解
FPGA实现sobel边缘检测并Modelsim仿真,与MATLAB实现效果对比
@keyframes css3动画技巧与代码实例
[leecode每日一题]面试题 01.09. 字符串轮转
jvm初识
独立站大卖家都在用的运营技巧
HtmlUnit、Jsoup、webmagic基本介绍
232. 用栈实现队列(简单)
如何使用CSS和JavaScript实施暗模式?
- 原文地址:https://blog.csdn.net/weixin_47365903/article/details/120895286
