-
深度强化学习中Double DQN算法(Q-Learning+CNN)的讲解及在Asterix游戏上的实战(超详细 附源码)
需要源码和环境搭建请点赞关注收藏后评论区留下QQ~~~
一、核心思想
针对DQN中出现的高估问题,有人提出深度双Q网络算法(DDQN),该算法是将强化学习中的双Q学习应用于DQN中。在强化学习中,双Q学习的提出能在一定程度上缓解Q学习带来的过高估计问题。
DDQN的主要思想是在目标值计算时将动作的选择和评估分离,在更新过程中,利用两个网络来学习两组权重,分别是预测网络的权重W和目标网络的权重W',在DQN中,动作选择和评估都是通过目标网络来实现的,而在DDQN中,计算目标Q值时,采取目标网络获取最优动作,再通过预测网络估计该最优动作的目标Q值,这样就可以将最优动作选额和动作值函数估计分离,采用不用的样本保证独立性
二、允许结果与分析
本节实验在Asterix游戏上,通过控制参数变量对DQN,DDQN算法进行性能对比从而验证了在一定程度上,DDQN算法可以缓解DQN算法的高估问题,DDQN需要两个不同的参数网络,每1000步后预测预测网络的参数同步更新给目标网络,实验设有最大能容纳1000000记录的缓冲池,每个Atari游戏,DDQN算法训练1000000时间步
实战结果如下图所示,图中的DDQN算法最后收敛回报明显大于DQN,并且在实验过程中,可以发现DQN算法容易陷入局部的情况,其问题主要在于Q-Learning中的最大化操作,Agent在选择动作时每次都取最大Q值得动作,对于真实的策略来说,在给定的状态下并不是每次都选择Q值最大的动作,因为一般真实的策略都是随机性策略,所以在这里目标值直接选择动作最大的Q值往往会导致目标值高于真实值
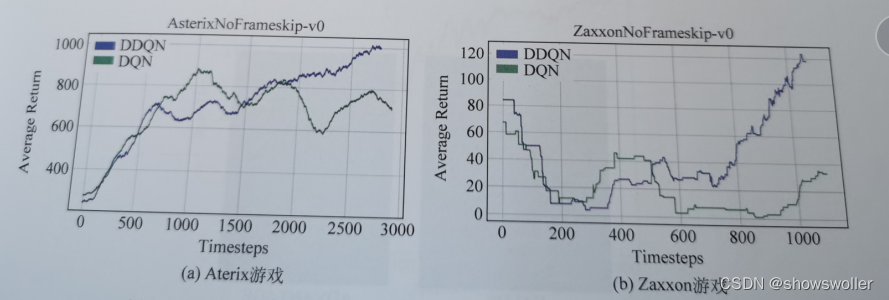
为了解决值函数高估计的问题,DDQN算法将动作的选择和动作的评估分别用不同的值函数来实现,结果表明DDQN能够估计出更准确的Q值,在一些Atari2600游戏中可获得更稳定有效的策略
三、代码
部分源码如下
- import gym, random, pickle, os.path, math, glob
- import numpy as np
- import pandas as pd
- import matplotlib.pyplot as plt
- import torch
- import torch.optim as optim
- import torch.nn as nn
- import torch.nn.functional as F
- import torch.autograd as autograd
- import pdb
- from atari_wrappers import make_atari, wrap_deepmind,LazyFrames
- def __init__(self, in_channels=4, num_actions=5):
- nnels: number of channel of input.
- i.e The number of most recent frames stacked together as describe in the paper
- num_actions: number of action-value to output, one-to-one correspondence to action in game.
- """
- super(DQN, self).__init__()
- self.conv1 = nn.Conv2d(in_channels, 32, kernel_size=8, stride=4)
- self.conv2 = nn.Conv2d(32, 64, kernel_size=4, stride=2)
- self.conv3 = nn.Conv2d(64, 64, kernel_size=3, stride=1)
- self.fc4 = nn.Linear(7 * 7 * 64, 512)
- self.fc5 = nn.Linear(512, num_actions)
- def forward(self, x):
- x = F.relu(self.conv1(x))
- x = F.relu(self.conv2(x))
- x = F.relu(self.conv3(x))
- x = F.relu(self.fc4(x.view(x.size(0), -1)))
- return self.fc5(x)
- class Memory_Buffer(object):
- def __init__(self, memory_size=1000):
- self.buffer = []
- self.memory_size = memory_size
- self.next_idx = 0
- def push(self, state, action, reward, next_state, done):
- data = (state, action, reward, next_state, done)
- if len(self.buffer) <= self.memory_size: # buffer not full
- self.buffer.append(data)
- else: # buffer is full
- self.buffer[self.next_idx] = data
- self.next_idx = (self.next_idx + 1) % self.memory_size
- def sample(self, batch_size):
- states, actions, rewards, next_states, dones = [], [], [], [], []
- for i in range(batch_size):
- idx = random.randint(0, self.size() - 1)
- data = self.buffer[idx]
- state, action, reward, next_state, done= data
- states.append(state)
- actions.append(action)
- rewards.append(reward)
- next_states.append(next_state)
- dones.append(done)
- return np.concatenate(states), actions, rewards, np.concatenate(next_states), dones
- def size(self):
- return len(self.buffer)
- class DDQNAgent:
- def __init__(self, in_channels = 1, action_space = [], USE_CUDA = False, memory_size = 10000, epsilon = 1, lr = 1e-4):
- self.epsilon = epsilon
- self.action_space = action_space
- self.memory_buffer = Memory_Buffer(memory_size)
- self.DQN = DQN(in_channels = in_channels, num_actions = action_space.n)
- self.DQN_target = DQN(in_channels = in_channels, num_actions = action_space.n)
- self.DQN_target.load_state_dict(self.DQN.state_dict())
- self.USE_CUDA = USE_CUDA
- if USE_CUDA:
- self.DQN = self.DQN.to(device)
- self.DQN_target = self.DQN_target.to(device)
- self.optimizer = optim.RMSprop(self.DQN.parameters(),lr=lr, eps=0.001, alpha=0.95)
- def observe(self, lazyframe):
- # from Lazy frame to tensor
- state = torch.from_numpy(lazyframe._force().transpose(2,0,1)[None]/255).float()
- if self.USE_CUDA:
- state = state.to(device)
- return state
- def value(self, state):
- q_values = self.DQN(state)
- return q_values
- def act(self, state, epsilon = None):
- """
- sample actions with epsilon-greedy policy
- recap: with p = epsilon pick random action, else pick action with highest Q(s,a)
- """
- if epsilon is None: epsilon = self.epsilon
- q_values = self.value(state).cpu().detach().numpy()
- if random.random()
- aciton = random.randrange(self.action_space.n)
- else:
- aciton = q_values.argmax(1)[0]
- return aciton
- def compute_td_loss(self, states, actions, rewards, next_states, is_done, gamma=0.99):
- """ Compute td loss using torch operations only. Use the formula above. """
- actions = torch.tensor(actions).long() # shape: [batch_size]
- rewards = torch.tensor(rewards, dtype =torch.float) # shape: [batch_size]
- is_done = torch.tensor(is_done, dtype = torch.uint8) # shape: [batch_size]
- if self.USE_CUDA:
- actions = actions.to(device)
- rewards = rewards.to(device)
- is_done = is_done.to(device)
- # get q-values for all actions in current states
- predicted_qvalues = self.DQN(states)
- # select q-values for chosen actions
- predicted_qvalues_for_actions = predicted_qvalues[
- range(states.shape[0]), actions
- ]
- # compute q-values for all actions in next states
- ## Where DDQN is different from DQN
- predicted_next_qvalues_current = self.DQN(next_states)
- predicted_next_qvalues_target = self.DQN_target(next_states)
- # compute V*(next_states) using predicted next q-values
- next_state_values = predicted_next_qvalues_target.gather(1, torch.max(predicted_next_qvalues_current, 1)[1].unsqueeze(1)).squeeze(1)
- # compute "target q-values" for loss - it's what's inside square parentheses in the above formula.
- target_qvalues_for_actions = rewards + gamma *next_state_values
- # at the last state we shall use simplified formula: Q(s,a) = r(s,a) since s' doesn't exist
- target_qvalues_for_actions = torch.where(
- is_done, rewards, target_qvalues_for_actions)
- # mean squared error loss to minimize
- #loss = torch.mean((predicted_qvalues_for_actions -
- # target_qvalues_for_actions.detach()) ** 2)
- loss = F.smooth_l1_loss(predicted_qvalues_for_actions, target_qvalues_for_actions.detach())
- return loss
- def sample_from_buffer(self, batch_size):
- states, actions, rewards, next_states, dones = [], [], [], [], []
- for i in range(batch_size):
- idx = random.randint(0, self.memory_buffer.size() - 1)
- data = self.memory_buffer.buffer[idx]
- frame, action, reward, next_frame, done= data
- states.append(self.observe(frame))
- actions.append(action)
- rewards.append(reward)
- next_states.append(self.observe(next_frame))
- dones.append(done)
- return torch.cat(states), actions, rewards, torch.cat(next_states), dones
- def learn_from_experience(self, batch_size):
- if self.memory_buffer.size() > batch_size:
- states, actions, rewards, next_states, dones = self.sample_from_buffer(batch_size)
- td_loss = self.compute_td_loss(states, actions, rewards, next_states, dones)
- self.optimizer.zero_grad()
- td_loss.backward()
- for param in self.DQN.parameters():
- param.grad.data.clamp_(-1, 1)
- self.optimizer.step()
- return(td_loss.item())
- else:
- return(0)
- def moving_average(a, n=3) :
- ret = np.cumsum(a, dtype=float)
- ret[n:] = ret[n:] - ret[:-n]
- return ret[n - 1:] / n
- def plot_training(frame_idx, rewards, losses):
- clear_output(True)
- plt.figure(figsize=(20,5))
- plt.subplot(131)
- plt.title('frame %s. reward: %s' % (frame_idx, np.mean(rewards[-100:])))
- plt.plot(moving_average(rewards,20))
- plt.subplot(132)
- plt.title('loss, average on 100 stpes')
- plt.plot(moving_average(losses, 100),linewidth=0.2)
- plt.show()
- # if __name__ == '__main__':
- # Training DQN in PongNoFrameskip-v4
- env = make_atari('PongNoFrameskip-v4')
- env = wrap_deepmind(env, scale = False, frame_stack=True)
- gamma = 0.99
- epsilon_max = 1
- epsilon_min = 0.01
- eps_decay = 30000
- frames = 1000000
- USE_CUDA = True
- learning_rate = 2e-4
- max_buff = 100000
- update_tar_interval = 1000
- batch_size = 32
- print_interval = 1000
- log_interval = 1000
- learning_start = 10000
- win_reward = 18 # Pong-v4
- win_break = True
- action_space = env.action_space
- action_dim = env.action_space.n
- state_dim = env.observation_space.shape[0]
- state_channel = env.observation_space.shape[2]
- agent = DDQNAgent(in_channels = state_channel, action_space= action_space, USE_CUDA = USE_CUDA, lr = learning_rate)
- #frame = env.reset()
- episode_reward = 0
- all_rewards = []
- losses = []
- episode_num = 0
- is_win = False
- # tensorboard
- summary_writer = SummaryWriter(log_dir = "DDQN", comment= "good_makeatari")
- # e-greedy decay
- epsilon_by_frame = lambda frame_idx: epsilon_min + (epsilon_max - epsilon_min) * math.exp(
- -1. * frame_idx / eps_decay)
- # plt.plot([epsilon_by_frame(i) for i in range(10000)])
- for i in range(frames):
- epsilon = epsilon_by_frame(i)
- #state_tensor = agent.observe(frame)
- #action = agent.act(state_tensor, epsilon)
- #next_frame, reward, done, _ = env.step(action)
- #episode_reward += reward
- #agent.memory_buffer.push(frame, action, reward, next_frame, done)
- #frame = next_frame
- loss = 0
- if agent.memory_buffer.size() >= learning_start:
- loss = agent.learn_from_experience(batch_size)
- losses.append(loss)
- if i % print_interval == 0:
- print("frames: %5d, reward: %5f, loss: %4f, epsilon: %5f, episode: %4d" % (i, np.mean(all_rewards[-10:]), loss, epsilon, episode_num))
- summary_writer.add_scalar("Temporal Difference Loss", loss, i)
- summary_writer.add_scalar("Mean Reward", np.mean(all_rewards[-10:]), i)
- summary_writer.add_scalar("Epsilon", epsilon, i)
- if iQN_dict.pth.tar")
- plot_training(i, all_rewards, losses)
创作不易 觉得有帮助请点赞关注收藏~~~
-
相关阅读:
华为OD机试 - 转盘寿司(Java & JS & Python & C)
作业错题一
using的应用
Linux的进程互调技术(多语言互调)
大数据——Spark Streaming
免密登录和Jenkins自动复制jar包以及启动
易基因:NAR:RCMS编辑系统在特定细胞RNA位点的靶向m5C甲基化和去甲基化研究|项目文章
基于Google Gemini 探索大语言模型在医学领域应用评估和前景
在 C# CLR 中学习 C++ 之了解 extern
DevOps
- 原文地址:https://blog.csdn.net/jiebaoshayebuhui/article/details/128049271
