-
Ros驱动Ur5e过程 | 手把手教程 | Ros驱动真实机器人Ur5e | Ros与Ur5e建立通讯 | Ubuntu20.04驱动Ur5e机器人
目录
环境
Ubuntu20.04 + Ur5e + 一根网线 + 一个U盘
安装ROS
省略,网络搜索即可
安装moveit
sudo apt install ros-noetic-moveit- 1
电脑端UR机器人驱动安装
其实当前UR机器人的驱动不止一种,所以搜一下可以看到好几种,但是现在
Universal_Robots_ROS_Driver是比较推荐的。-
这里需要在工作空间内准备三个文件
-
官方驱动
Universal_Robots_ROS_Driver用于机器人控制的驱动文件https://github.com/UniversalRobots/Universal_Robots_ROS_Driver
-
fmauch_universal_robot里全都是xx_moveit_config格式的文件,都是MoveIt的配置文件,即Setup Assist生成的现成文件,我们也就不需要额外进行Setup Assist操作了。 -
ur_msgs是一些机器人通信使用的msg和srv文件格式
-
cd 工作空间 git clone https://github.com/UniversalRobots/Universal_Robots_ROS_Driver.git src/Universal_Robots_ROS_Driver git clone -b calibration_devel https://github.com/fmauch/universal_robot.git src/fmauch_universal_robot git clone https://github.com/ros-industrial/ur_msgs.git src/ur_msgs #安装依赖 rosdep install --from-paths src --ignore-src -y #回到工作空间后编译 catkin_make source devel/setup.bash- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
UR实体机器人-软件安装与通信建立
urcap软件安装
这里需要安装一个
externalcontrol-1.0.5.urcap软件-
上面下载的
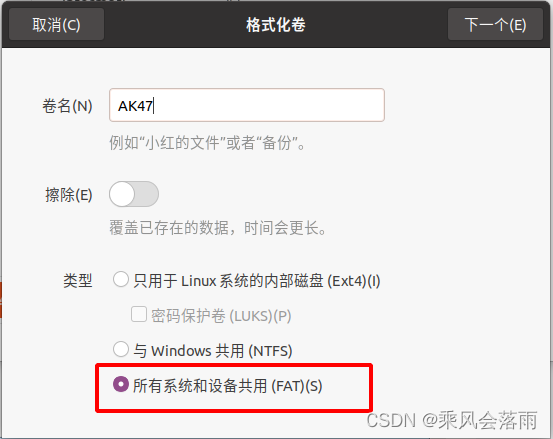
Universal_Robots_ROS_Driver里就有,打开Universal_Robots_ROS_Driver/ur_robot_driver/resources文件夹里就有,拷贝至U盘中,注意U盘是FAT格式的
-
把U盘插到UR机器人控制面板上(我格式化u盘插到控制面板的时候不知道为啥还是提示格式不支持,用控制面板格式化后再在电脑上格式化了一下才行。而且UR控制面板格式化后Ubuntu突然就读不出来了,换到windows就能读出来)
-
右上角【settings】-【System】-【URCaps】
- 单机底部的【+】,选择U盘里的
externalcontrol-1.0.5.urcap文件,单机打开,最后选择右下角的【Restart】重启
- 单机底部的【+】,选择U盘里的
-
重启后,应该就能看到【Installation】和【Program】里都多了【URCaps】的选项
-
点击【Program】-【URCaps】,点一下【External Control】,会创建一个空程序,将External Control插入到程序树中标题栏【Save】-【Save as】,我存为了
external_control.urp
电脑端ip问题
这里我们首先需要用一根网线将电脑和ur5e控制箱直连,随后将电脑的ip填到ur5e功能面板中。
这个地方我卡了很久,也验证了计网的知识我还在入门阶段。
-
如何查看我们电脑的ip地址呢?
-
电脑上直接在终端输入ifconfig,理论上来讲第一个选项比如
eno1后面跟的就是ip地址。(但是我这里没有,只在第三个选项wlp4s0后面跟了inet,我就直接把他填到了host’s IP上(第一天还是能联通的,第二天完全就ping不通了);如果你的ip正常(例如192开头)那就直接填写到ur5e控制面板好了-跳到下方【不需指定临时ip】就可以了)
需要指定临时ip的情况

-
在此情况下,输入以下来指定电脑端的临时IP地址。
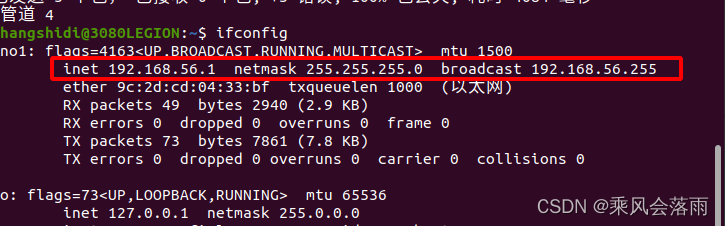
sudo ifconfig eno1 192.168.56.1 netmask 255.255.255.0- 1

- 这时候我们再输入
ifconfig检查一下,已经有了ip地址
不需指定临时ip
- 然后在【Installation】-【URCaps】-【External Control】,然后设置你PC电脑的IP地址(上面得到的IP),端口为50002不用动。

UR机器人IP
给UR机器人配置静态IP,使得电脑可以连接到UR机器人
-
点击【Setting】-【System】-【Network】-【Static Address】,【IP address】前三位与电脑地址一样,【Subnet mask】填255.255.255.0。

-
检查:我们在电脑上直接输入ping UR机器人的ip,如果正常响应,那就说明联通了。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-geFF0WxJ-1669341632040)(image/image_E2AgOMWv35.png)]](https://1000bd.com/contentImg/2024/04/18/9413e868ee430793.png)
机器人的启动
左下角电源按钮,把机器人启动
驱动UR机器人
这一步就是跑程序的过程了,先记录一下我的ip
电脑-ip : 192.168.56.1
ur5e-ip :192.168.56.101
- 官方教程
- 每台UR机器人在工厂内都进行了正逆运动学矫正。虽然这个过程非必要,但是官方非常推荐先提取机器人的校准信息,可以保证运动精度。直接在命令行中输入
$ roslaunch ur_calibration calibration_correction.launch \ robot_ip:=target_filename:="${HOME}/my_robot_calibration.yaml" #==========我的,(我直接把我的地址改为了绝对地址) $ roslaunch ur_calibration calibration_correction.launch robot_ip:=192.168.56.101 target_filename:="/home/zhangshidi/GitHub/Ros_control/src/fmauch_universal_robot/ur_description/config/ur5e_calibration.yaml" - 1
- 2
- 3
- 4
- 5
- 6
- 7
注意,其中的robot_ip换成你自己的机器人ip,而target_filename是生成的文件地址,自己指定就好,可以像我一样指定绝对地址
- 启动驱动程序(直接)
$ roslaunch ur_robot_driver_bringup.launch robot_ip:=192.168.56.101 #========我的 $ roslaunch ur_robot_driver ur5e_bringup.launch robot_ip:=192.168.56.101 - 1
- 2
- 3
- 4
-
在Ur5e面板上,点击【Run】,选择【加载文件】,选择上面自己保存的external_control.urp文件,底栏是有一个【播放按钮】的,按下就可以开始运行程序
-
打开新终端,启动moveit
roslaunch ur5e_moveit_config ur5e_moveit_planning_execution.launch limited:=true- 1
- 2
- 打开新终端,启动rviz
roslaunch ur5e_moveit_config moveit_rviz.launch config:=true- 1
- 2
-
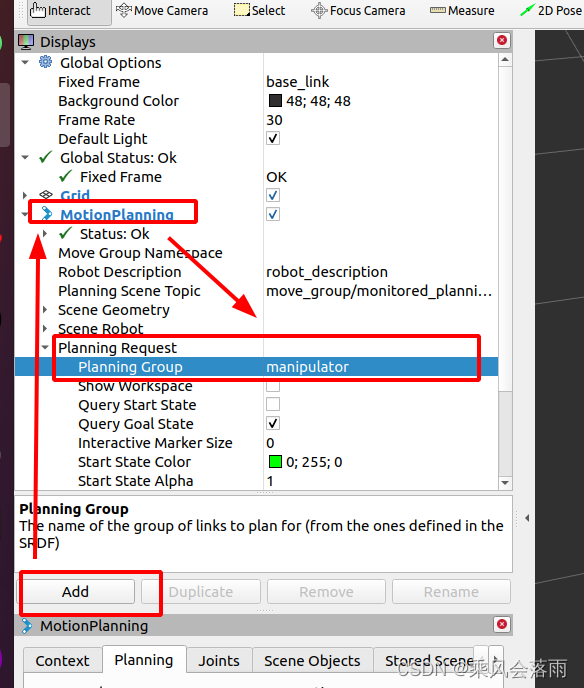
通过【Add】添加【MotionPlanning】,再在MotionPlanning的Planning Request中选择Planning Group 为mainpulator,就可以看到规划球出来了
-
然后把球拖到一个位置,看能不能plan,plan完execute就可以看到机械臂跟着动了
任务完成!
最后放下参考,前前后后先后看了数十篇博客,我觉得以下博客写的还是不错并且有帮助的。
[ubuntu20.04安装ros-noetic,moveit,ur机器人驱动...指南!\_Dawn\_yc的博客-CSDN博客](https://blog.csdn.net/Dawn_yc/article/details/114791755 "ubuntu20.04安装ros-noetic,moveit,ur机器人驱动...指南!_Dawn_yc的博客-CSDN博客") [ROS noetic与UR3真实机械臂通信\_junkie\_luo的博客-CSDN博客\_机械臂通信](https://blog.csdn.net/luojunqi2017/article/details/119272683 "ROS noetic与UR3真实机械臂通信_junkie_luo的博客-CSDN博客_机械臂通信") [如何使用ROS控制真实UR5机器人\_梧桐w的博客-CSDN博客\_ros控制ur5](https://blog.csdn.net/weixin_44715231/article/details/114796006 "如何使用ROS控制真实UR5机器人_梧桐w的博客-CSDN博客_ros控制ur5") [https://blog.csdn.net/chch2010523/article/details/124552586](https://blog.csdn.net/chch2010523/article/details/124552586 "https://blog.csdn.net/chch2010523/article/details/124552586") [https://blog.csdn.net/zxxxiazai/article/details/103568577](https://blog.csdn.net/zxxxiazai/article/details/103568577 "https://blog.csdn.net/zxxxiazai/article/details/103568577") [https://blog.csdn.net/santututu39/article/details/123719808](https://blog.csdn.net/santututu39/article/details/123719808 "https://blog.csdn.net/santututu39/article/details/123719808")- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
-
相关阅读:
布隆过滤器
编程题练习@9-5
Java11新特性学习
Y2期末测试
【JS实战案例汇总——不定时更新版】
服务框架Dubbo和ZooKeeper
头条百科是什么?创建头条百科效果怎么样?
智能井盖传感器扣好“城市纽扣”,让市民脚下更有安全感
判断序列是否为正确的出栈序列
linux centos7提示 cannot found font installed on the system.calibri
- 原文地址:https://blog.csdn.net/dolpin_ink/article/details/128032809