-
区间信息维护与查询【最近公共祖先LCA 】 - 原理
区间信息维护与查询【最近公共祖先LCA 】 - 原理
最近公共祖先(Lowest Common Ancestors,LCA)指有根树中距离两个节点最近的公共祖先。
祖先指从当前节点到树根路径上的所有节点。

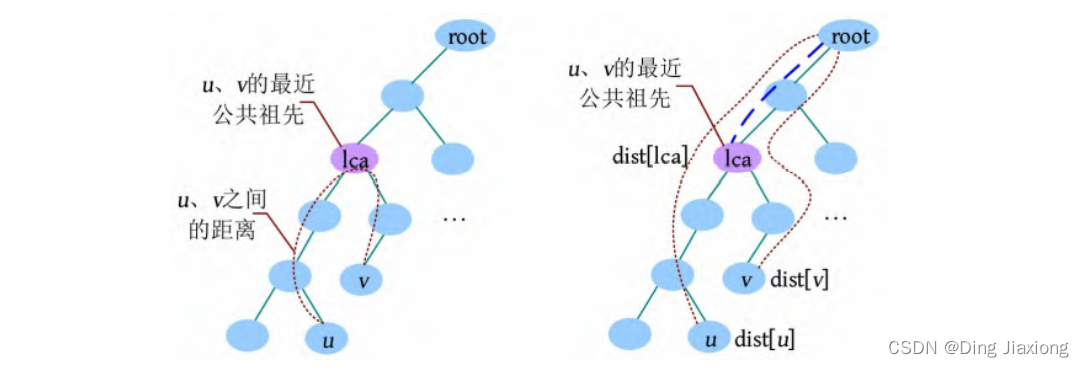
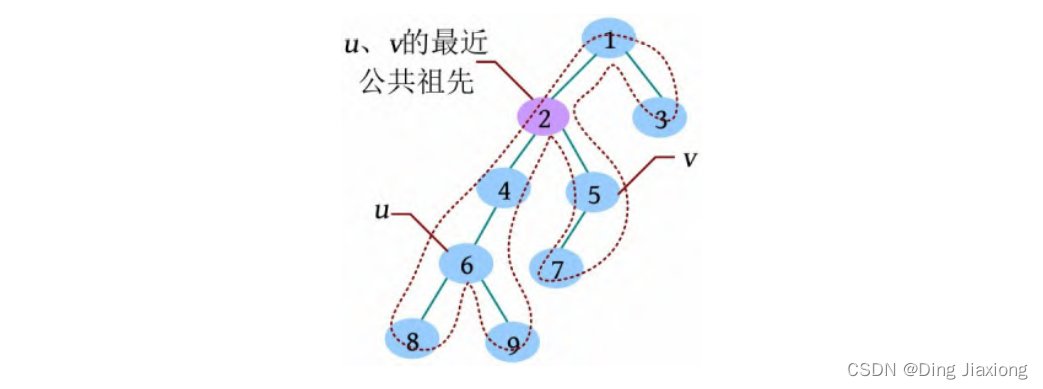
u 和v 的公共祖先指一个节点既是u 的祖先,又是v 的祖先。u 和v 的最近公共祖先指距离u 和v 最近的公共祖先。若v 是u 的祖先,则u 和v 的最近公共祖先是v 。

可以使用LCA求解树上任意两点之间的距离。求u 和v 之间的距离时,若u 和v 的最近公共祖先为lca,则u 和v 之间的距离为u 到树根的距离加上v 到树根的距离减去2倍的lca到树根的距离:dist[u]+dist[v ]-2×dist[lca]。
求解LCA的方法有很多,包括暴力搜索法、树上倍增法、在线RMQ算法、离线Tarjan算法和树链剖分。
- 在线算法: 以序列化方式一个一个地处理输入,也就是说,在开始时并不需要知道所有输入,在解决一个问题后立即输出结果。
- 离线算法: 在开始时已知问题的所有输入数据,可以一次性回答所有问题。
【原理1】 暴力搜索法
暴力搜索法有两种:向上标记法和同步前进法。
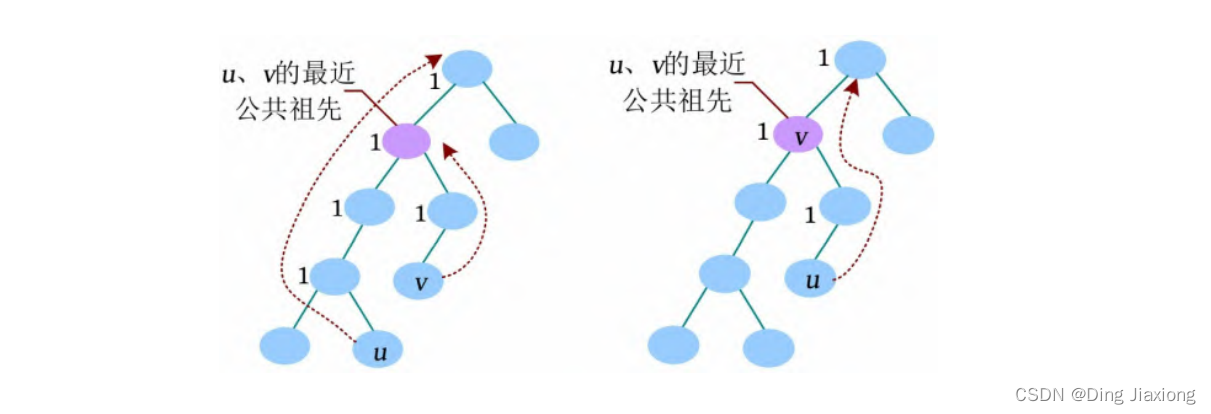
① 向上标记法
从u 向上一直到根节点,标记所有经过的节点;若v 已被标记,则v 节点为LCA(u , v );否则v 也向上走,第1次遇到已标记的节点时,该节点为LCA(u , v )。
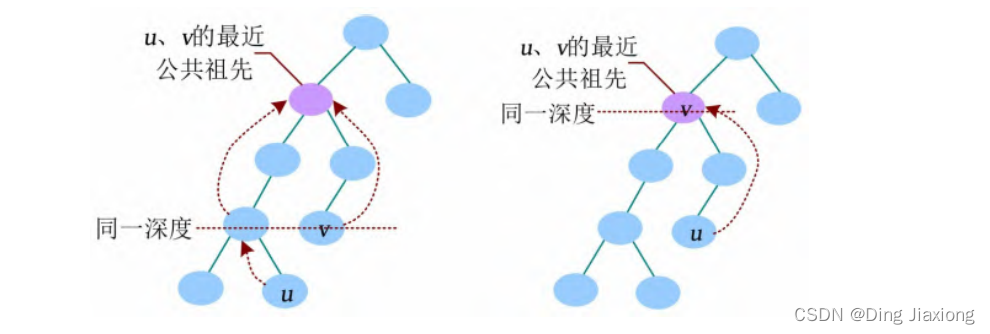
② 同步前进法
将u、v 中较深的节点向上走到和深度较浅的节点同一深度,然后两个点一起向上走,直到走到同一个节点,该节点就是u、v 的最近公共祖先,记作LCA(u , v )。若较深的节点u 到达v 的同一深度时,那个节点正好是v ,则v 节点为LCA(u , v )。
③ 算法分析
以暴力搜索法求解LCA,两种方法的时间复杂度在最坏情况下均为O(n )。
【原理2】 树上倍增法
树上倍增法不仅可以解决LCA问题,还可以解决很多其他问题,掌握树上倍增法是很有必要的。
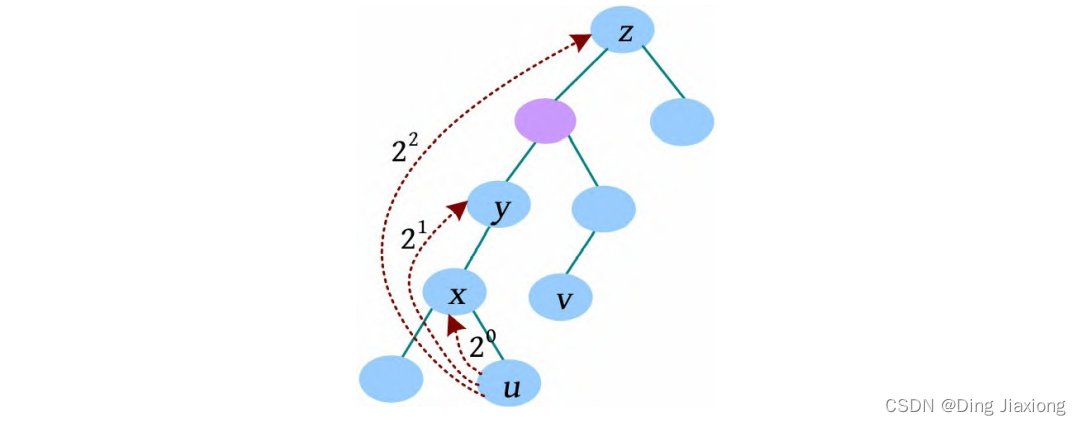
F[i , j ]表示i 的2j 辈祖先,即i 节点向根节点走2 j 步到达的节点。
u 节点向上走20 步,则为u 的父节点x ,F[u , 0]=x ;向上走2^1步,到达y ,F[u , 1]=y ;向上走2^2 步,到达z ,F[u , 2]=z ;向上走2^3 步,节点不存在,令F[u , 3]=0。
F[i , j ]表示i 的2^j 辈祖先,即i 节点向根节点走2^j 步到达的节点。可以分两个步骤:i 节点先向根节点走2^(j -1) 步得到F[i , j-1];再从F[i , j -1]节点出发向根节点走2^(j -1) 步,得到F[F[i , j-1], j -1],该节点为F[i , j ]。
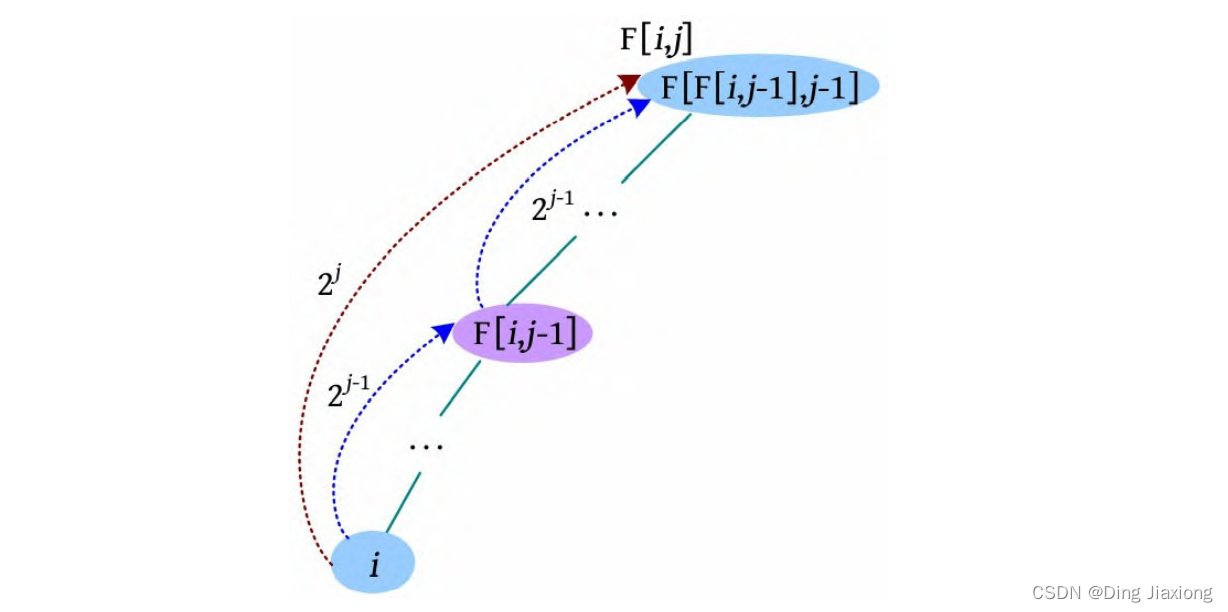
递推公式:F[i , j ]=F[F[i , j -1], j -1],i =1, 2, …n ,j=0, 1, 2, …k ,2 k ≤n ,k =log2 n 。
① 算法设计
[1] 创建ST。
[2] 利用ST求解LCA。
② 举个栗子
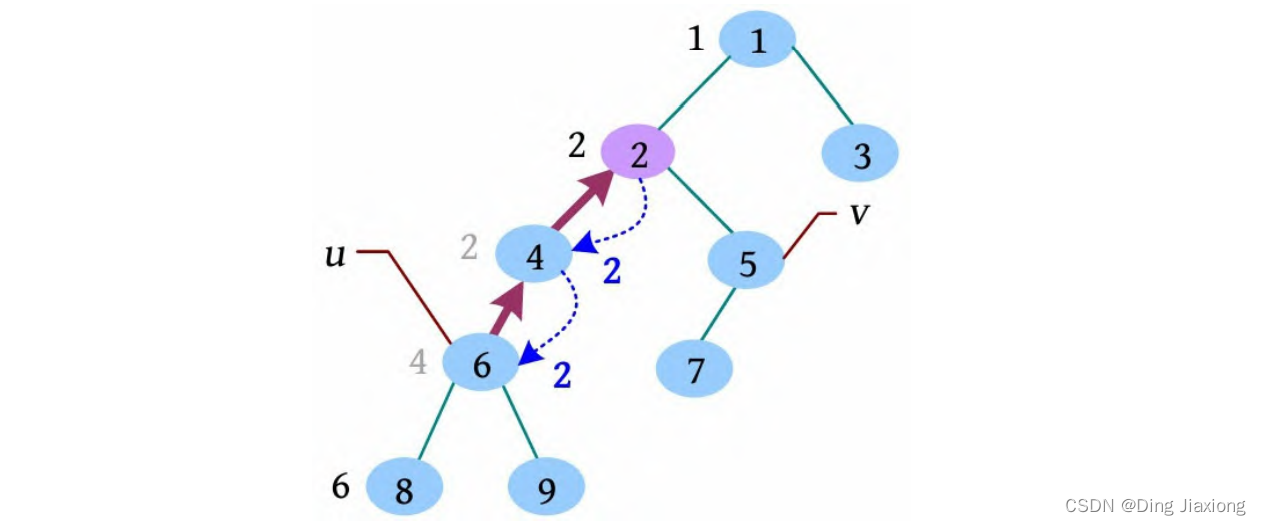
和前面暴力搜索中的同步前进法一样,先让深度大的节点y 向上走到与x 同一深度,然后x、y 一起向上走。和暴力搜索不同的是,向上走是按照倍增思想走的,不是一步一步向上走的,因此速度较快。
问题一: 怎么让深度大的节点y 向上走到与x 同一深度呢?
假设y 的深度比x 的深度大,需要y 向上走到与x 同一深度,k=3,则求解过程如下。
[1] y 向上走2^3 步,到达的节点深度比x 的深度小,什么也不做。
[2] 减少增量,y 向上走2^2 步,此时到达的节点深度比x 的深度大,y 上移,y =F[y ][2]。
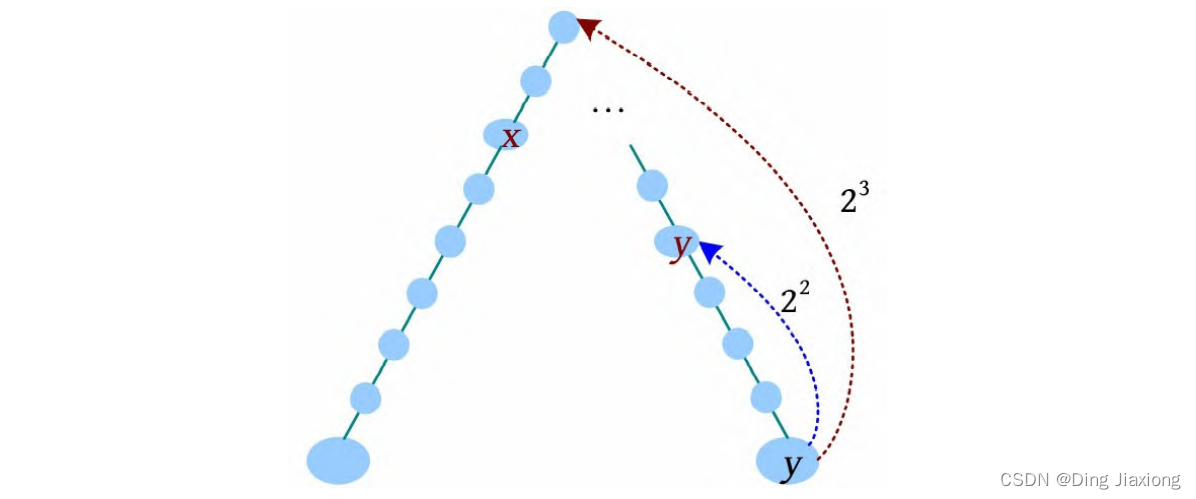
[3] 减少增量,y 向上走2^1 步,此时到达的节点深度与x 的深度相等,y 上移,y =F[y ][1]。
[4] 减少增量,y 向上走2^0 步,到达的节点深度比x 的深度小,什么也不做。此时x、y 在同一深度。

总结:按照增量递减的方式,到达的节点深度比x 的深度小时,什么也不做;到达的节点深度大于或等于x 的深度时,y 上移,直到增量为0,此时x、y 在同一深度。
问题二: x、y 一起向上走,怎么找最近的公共祖先呢?
假设x 、y 已到达同一深度,现在一起向上走,k =3,则其求解过程如下。
[1] x 、y 同时向上走2^3 步,到达的节点相同,什么也不做。
[2] 减少增量,x 、y 同时向上走2^2 步,此时到达的节点不同,x 、y 上移,x =F[x ][2],y =F[y ][2]。
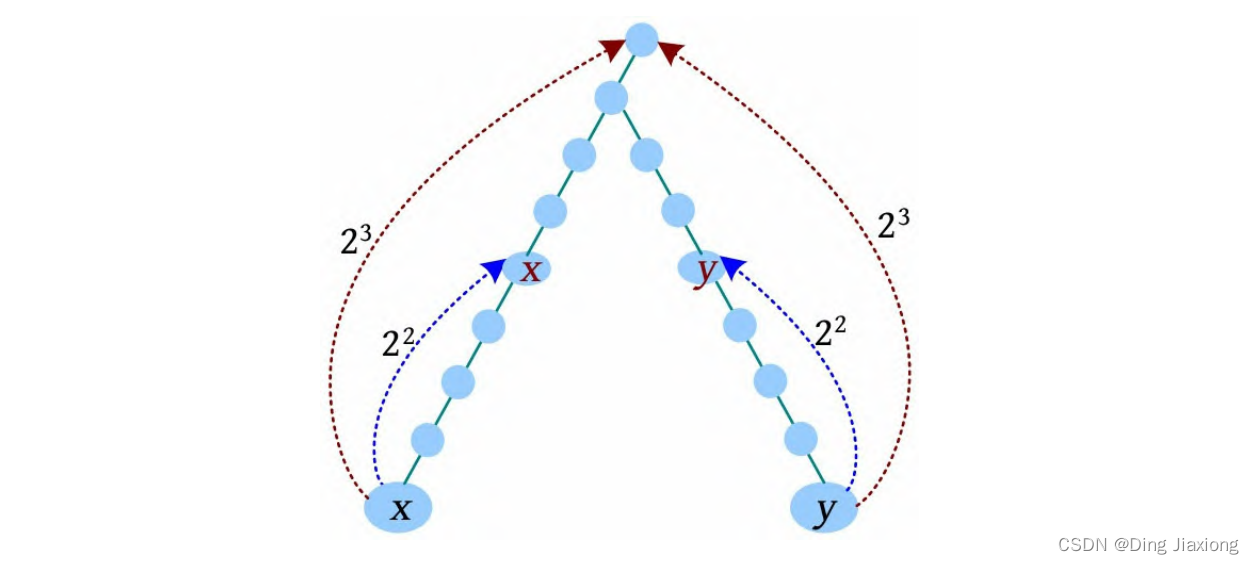
[3] 减少增量,x 、y 同时向上走2^1 步,此时到达的节点不同,x 、y 上移,x =F[x ][1],y =F[y ][1]。
[4] 减少增量,x 、y 同时向上走2^0 步,此时到达的节点相同,什么也不做。
此时x 、y 的父节点为最近公共祖先节点,即LCA(x , y )=F[x ][0]。
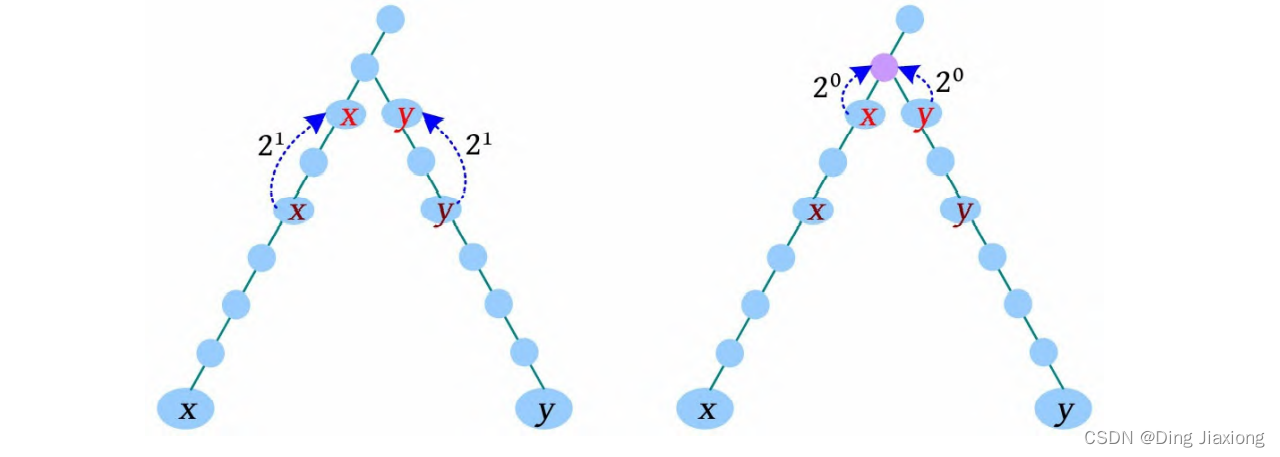
完整的求解过程如下图所示。
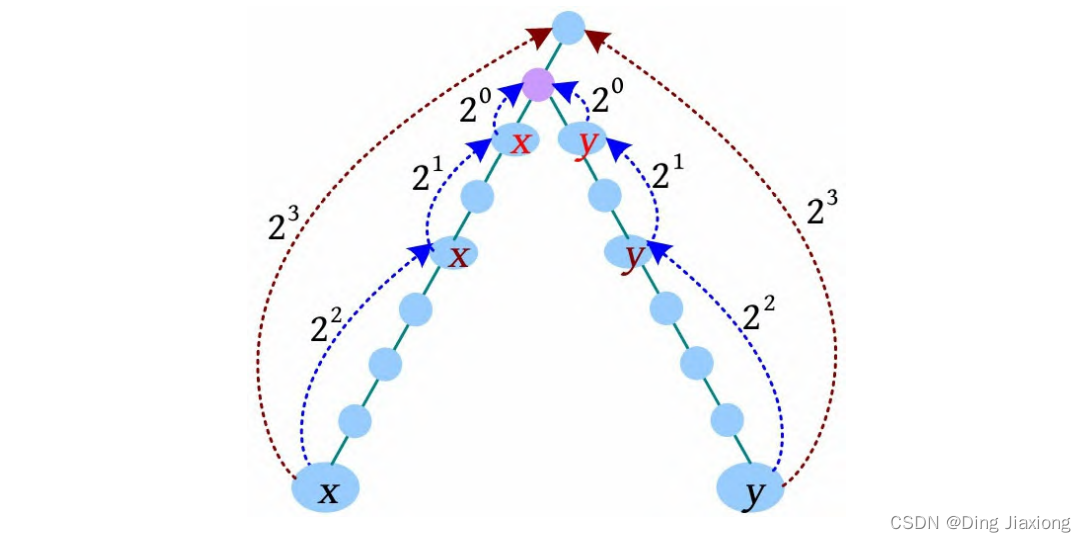
总结:按照增量递减的方式,到达的节点相同时,什么也不做;到达的节点不同时,同时上移,直到增量为0。此时x 、y 的父节点为公共祖先节点。
③ 算法实现
void ST_create(){ //构造ST for(int j = 1; j <= k ; j++){ for(int i = 1; i <= n ; i++){ //i 先走2^(j - 1) 步到达F[i][j - 1] ,再走 2^(j - 1) 步 F[i][j] = F[F[i][j- 1]][j -1]; } } } int LCA_st_query(int x, int y){ // 求x 、 y 的最近公共祖先 if(d[x] > d[y]){ // 保证x 的深度小于或 等于y swap(x , y); } for(int i = k ; i >= 0 ; i --){ //y 向上走到 与 x 同一深度 if(d[F[y][i]] >= d[x]){ y = F[y][i]; } } if(x == y){ return x; } for(int i = k ; i >= 0 ; i --){ // x、y 一起向上走 if(F[x][i] != F[y][i]){ x = F[x][i] , y = F[y][i]; } } return F[x][0]; //返回x 的父节点 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
④ 算法分析
采用树上倍增法求解LCA,创建ST需要O (n logn )时间,每次查询都需要O (logn )时间。一次建表、多次使用,该算法是基于倍增思想的动态规划,适用于多次查询的情况。若只有几次查询,则预处理需要O (n logn )时间,还不如暴力搜索快。
【原理3】 在线RMQ 算法
两个节点的LCA一定是两个节点之间欧拉序列中深度最小的节点,寻找深度最小值时可以使用RMQ算法。
① 完美图解
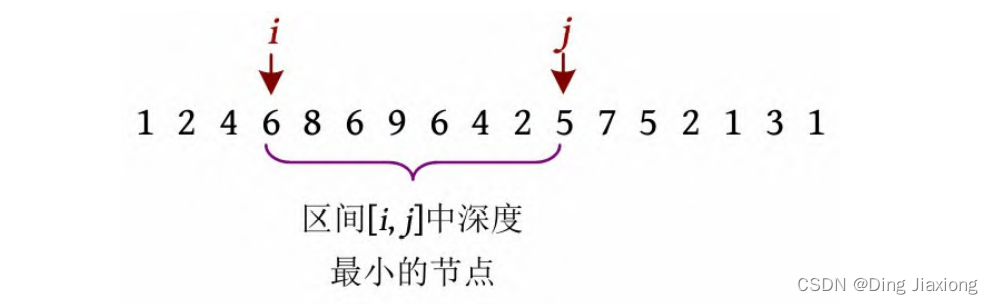
欧拉序列指在深度遍历过程中把依次经过的节点记录下来,把回溯时经过的节点也记录下来,一个节点可能被记录多次,相当于从树根开始,一笔画出一个经过所有节点的回路。
该树的欧拉序列为1 2 4 6 8 6 9 6 4 2 5 7 5 2 1 3 1,搜索时得到6和5首次出现的下标i 、j ,然后查询该区间深度最小的节点,为6和5号节点的最近公共祖先。
② 算法实现
[1] 深度遍历,得到3个数组:首次出现的下标是pos[],深度遍历得到的欧拉序列是seq[],深度是dep[]。
pos[u] = ++tot; //u 首次出现的下标 seq[tot] = u; //dfs 遍历得到的 欧拉序列 dep[tot] = d; //深度 void dfs(int u , int d){ // dfs 序 vis[u] = true; pos[u] = ++tot; //u 首次出现的下标 seq[tot] = u; //dfs 遍历得到的欧拉序列 dep[tot] = d; //深度 for(int i = head[u] ; i ; i = e[i].next){ int v = e[i].to , w= e[i].c; if(vis[v]){ continue; } dist[v] = dist[u] + w; dfs(v , d + 1); seq[++ tot] = u; //dfs 遍历序列 dep[tot] = d; //深度 } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
[2] 根据欧拉序列的深度,创建区间最值查询的ST。F(i , j )表示[i , i +2 j -1]区间深度最小的节点下标。
void ST_create(){ //创建 ST for(int i = 1; i <= tot; i ++){ // 初始化 F[i][0] = i; //记录下标,不是最小深度 } int k = log2(tot); for(int j = 1; j <= k ; j ++){ for(int i = 1; i <= tot - (1 << j) + 1 ; i ++){ // tot - 2 ^ j + 1 if(dep[F[i][j - 1]] < dep[F[i + (1 << (j - 1))][j - 1]]){ F[i][j] = F[i][j - 1]; } else{ F[i][j] = F[i + (1 << (j - 1))][j - 1]; } } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
[3] 查询[l , r ]区间深度最小的节点下标,与RMQ区间查询类似。
int RMQ_query(int l , int r){ // 查询[ l ,r] 的区间最值 int k =log2(r - l + 1); if(dep[F[l][k]] < dep[F[r - (1 << k ) + 1][k]]){ return F[l][k]; } else{ return F[r - (1 << k) + 1][k]; //返回深度最小的 节点下标 } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
[4] 求x、y 的最近公共祖先,先得到x、y 首次出现在欧拉序列中的下标,然后查询该区间深度最小的节点的下标,根据下标读取欧拉序列的节点即可。
int LCA(int x, int y){ // 求x 、 y 的最近公共祖先 int l = pos[x] , r = pos[y]; //读取第 1 次出现的下标 if(l > r){ swap(l , r); } return seq[RMQ_query(l , r)]; //返回节点 }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
⑤ 算法分析
在线RMQ算法是基于倍增和RMQ的动态规划算法,其预处理包括深度遍历和创建ST,
需要O (n logn )时间,每次查询都需要O (1)时间。
注意:虽然都用到了ST,但是在线RMQ算法中的ST和树上倍增算法中的ST,其表达的含义是不同的,前者表示区间最值,后者表示向上走的步数。
【原理4】 Tarjan 算法
这里的Tarjan算法是用于解决LCA问题的离线算法
在线算法指每读入一个查询(求一次LCA就叫作一次查询),都需要运行一次程序得到本次查询答案。若一次查询需要 O (logn )时间,则m 次查询需要O (m logn )时间。离线算法指首先读入所有查询,然后运行一次程序得到所有查询答案。Tarjan算法利用并查集优越的时空复杂性,可以在O (n +m )时间内解决LCA问题。
① Tarjan 算法
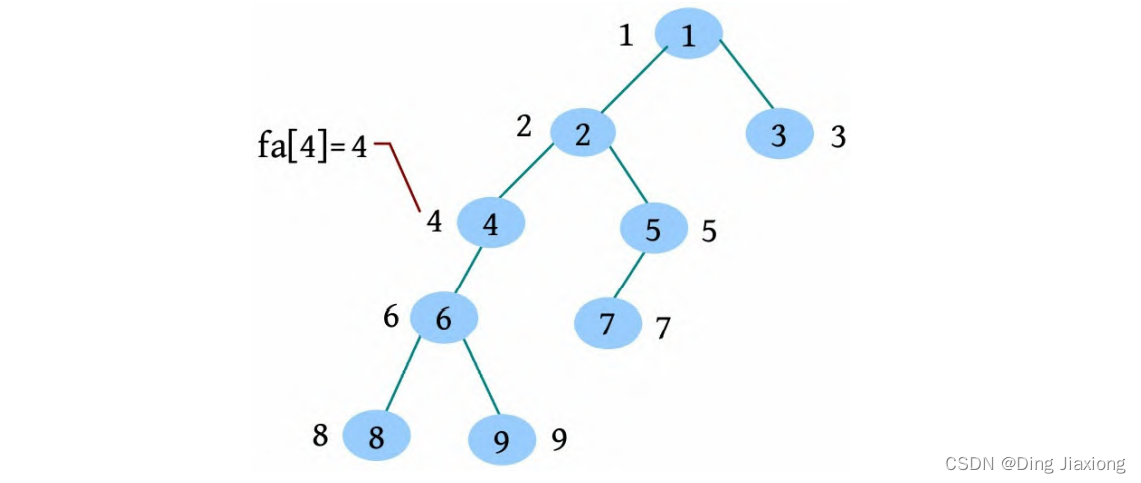
[1] 初始化集合号数组和访问数组,fa[i ]=i ,vis[i ]=0。
[2] 从u 出发深度优先遍历,标记vis[u ]=1,深度优先遍历u 所有未被访问的邻接点,在遍历过程中更新距离,回退时更新集合号。
[3] 当u 的邻接点全部遍历完毕时,检查关于u 的所有查询,若存在一个查询u 、v ,而vis[v ]=1,则利用并查集查找v 的祖宗,找到的节点就是u 、v 的最近公共祖先。
② 举个栗子
在树中求5、6的最近公共祖先,求解过程如下。
[1] 初始化所有节点的集合号都等于自己,fa[i ]=i ,vis[i]=0。
[2] 从根节点开始深度优先遍历,在遍历过程中标记vis[]=1。
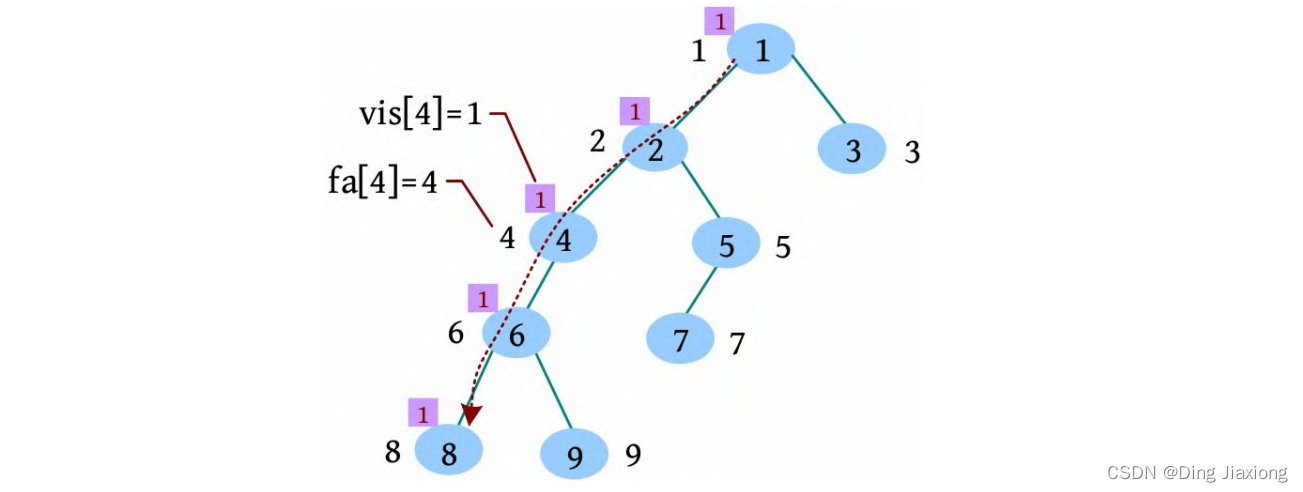
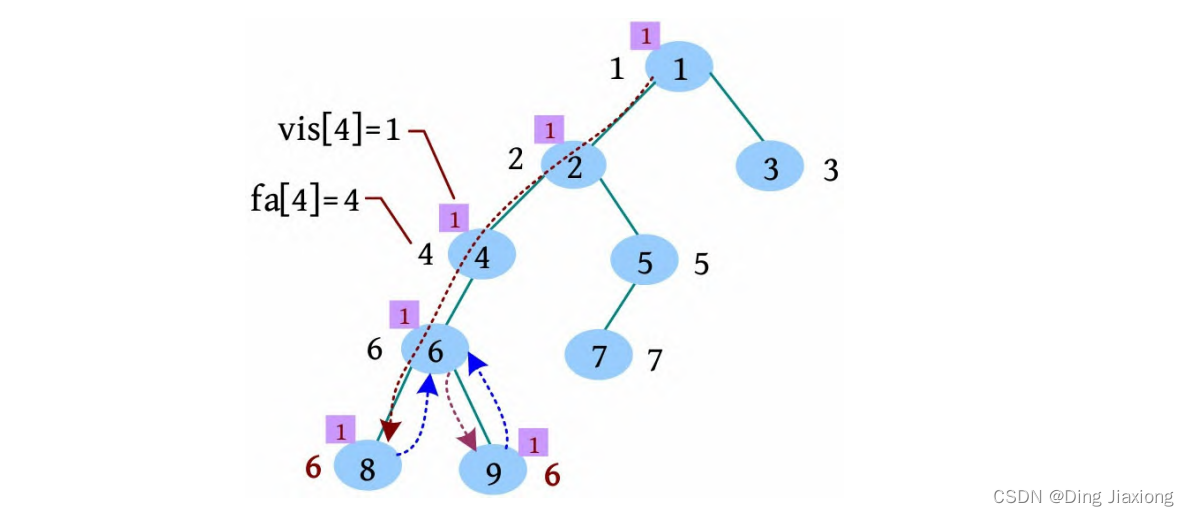
[3] 8号节点的邻接点已访问完毕,更新fa[8]=6,没有8相关的查询,回退到6。

[4] 遍历6号节点的下一个邻接点9,标记vis[9]=1,9号节点的邻接点已访问完毕,更新fa[9]=6,没有9相关的查询,回退到6。
[5] 6号节点的邻接点已访问完毕,更新fa[6]=4,有6相关的查询5(查询5 6),但是vis[5]≠1,什么也不做,返回到4。
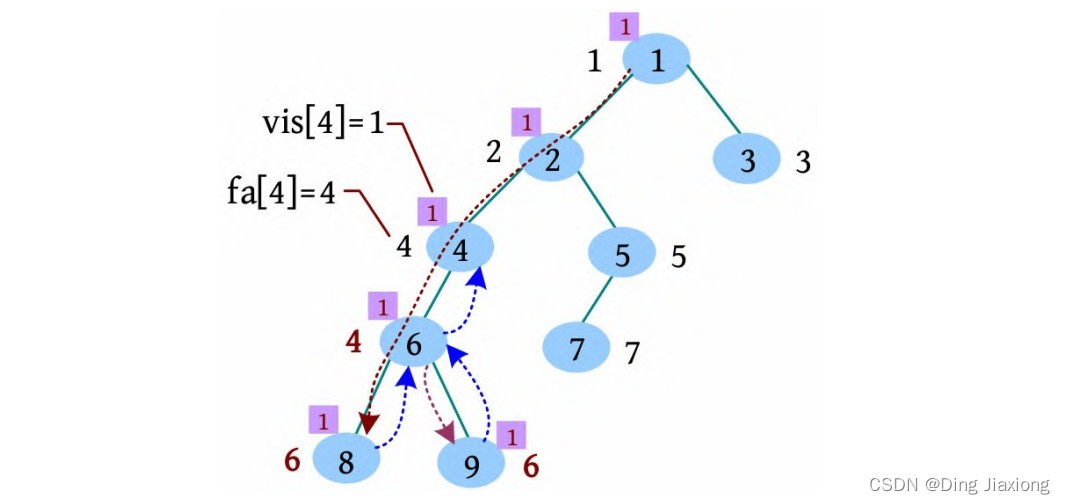
[6] 4号节点的邻接点已访问完毕,更新fa[4]=2,没有4相关的查询,返回到2。

[7] 遍历2号节点的下一个邻接点5,标记vis[5]=1,继续深度遍历到7,标记vis[7]=1,7号节点的邻接点已访问完毕,更新fa[7]=5,没有7相关的查询,回退到5。

[8] 5号节点的邻接点已访问完毕,更新fa[5]=2,有5相关的查询6(查询5 6),且vis[6]=1,此时需要从6号节点开始使用并查集查找祖宗。
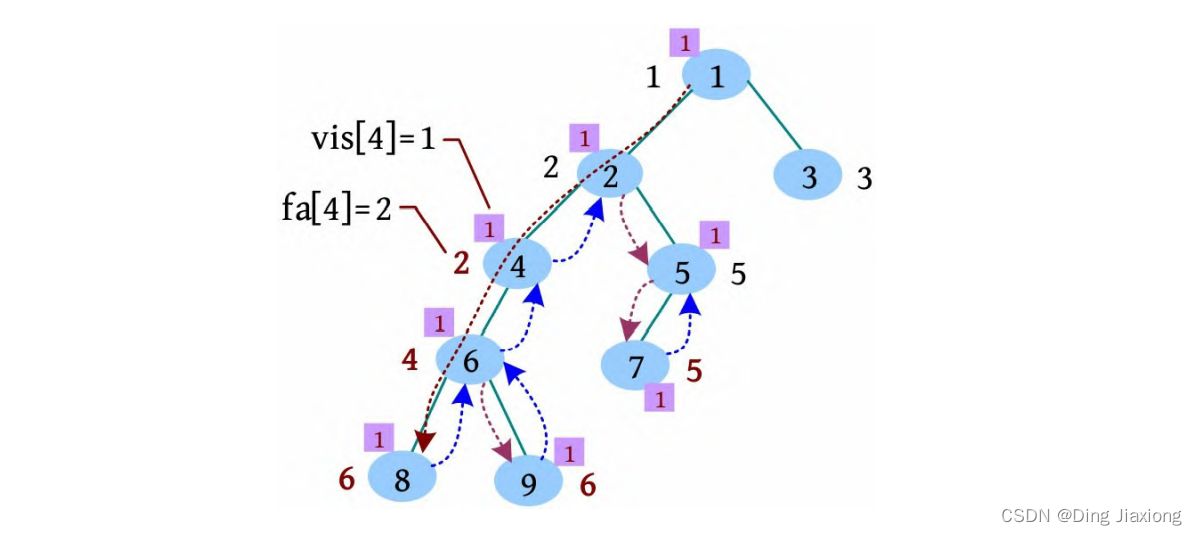
[9] 从6号节点开始利用并查集查找祖宗的的过程如下。首先判断6的集合号fa[6]=4,找4的集合号fa[4]=2,找2的集合号fa[2]=2,找到祖宗(集合号为其自身)后返回,并更新祖宗到当前节点路径上所有节点的集合号,即更新6、4的父节点fa[4]=2,fa[6]=2,此时fa[6]就是5和6的最近公共祖先。
[总结]
在当前节点u 的邻接点已访问完毕时,检查u 相关的所有查询v ,若vis[v ]≠1,则什么也不做;若vis[v ]=1,则利用并查集查找v 的祖宗,lca(u , v )=fa[v ]。实际上,u 的祖宗就是u 向上查找第1个邻接点未访问完的节点,它的fa[]还没有更新,仍满足fa[i]=i ,它就是v 的祖宗。
③ 算法实现
int find(int x){ //并查集 找祖宗 if(x != fa[x]){ fa[x] = find(fa[x]); } return fa[x]; } void tarjan(int u){ // Tarjan算法 vis[u] = 1; for(int i = head[u] ; i ; i = e[i].next){ int v = e[i].to , w = e[i].c; if(vis[v]){ continue; } dis[v] = dis[u] + w; tarjan(v); fa[v] = u; } for(int i = 0; i < query[u].size() ; i ++){ // u相关的所有查询 int v = query[u][i]; int id = query_id[u][i]; if(vis[y]){ int lca = find(v); ans[id] = dis[u] + dis[v] - 2 * dis[lca]; } } }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
④ 算法分析
离线Tarjan算法用到了并查集的优越性,m 次查询的时间为O (n+m )。
-
相关阅读:
[零基础学IoT Pwn] 环境搭建
【沁恒蓝牙mesh】CH58x USB功能开发记录(0)
2022宁夏杯D 包装纸箱设计
docker和docker compose 部署
游戏测试是一个怎样的行业?
IMX6ULL移植篇-uboot源码主要文件说明
Datax 数据同步-使用总结(二)
eslint如何支持uniapp的全局对象uni 和 H5+的plus 以及浏览器的全家对象 windows等...
机器学习强基计划0-4:通俗理解奥卡姆剃刀与没有免费午餐定理
数据库课程设计大作业大盘点【建议在校生收藏】
- 原文地址:https://blog.csdn.net/weixin_44226181/article/details/128011771