-
轻松玩转树莓派Pico之四、Ubuntu下在线debug环境搭建
目录
按照前文轻松玩转树莓派Pico之一、新手上路一文中的Pico固件更新方式(uf2文件格式),在正式开发过程中需要不断修改代码/更新固件,这种固件更新方式会感觉开发效率有些低。Pico开发板芯片为RP2040,ARM-Cortex-M0架构,官方开发板上留有SWD接口,那是不是可以在线debug呢?答案是肯定的。
官方文档:https://datasheets.raspberrypi.com/pico/getting-started-with-pico.pdf 中有详细相关流程介绍。
官方文档中提供了2种在线debug方式:
方式1:树莓派作为主机,同时也作为openocd的仿真器,对Pico开发板进行固定烧录、在线debug。
方式2:使用1个专门的Pico开发板,作为Picoprobe,对另外一个目标Pico板进行debug
本文使用的是方式2,相关操作主机是在Ubuntu下进行。
另外,JLink也支持Pico在线调试,但对应的要求会相对更高。要求如下:
- J-Link software V7.64e or later
- J-Link HW revision 11 or later (J-Link EDU Mini and J-Trace PRO V1 or later also supported)
- SEGGER Embedded Studio for ARM V6.30 or later
对比后,JLink对应的硬件成本也比官方文档提供的方案高很多。
JLink操作Pico相关文档,可在Raspberry Pi Pico - SEGGER Wiki 页面查看。
本文所有操作流程均来源于getting-started-with-pico.pdf一文,只是将对应流程进行针对性的梳理。涉及到的章节有:
- Chapter 5. Flash Programming with SWD
- Chapter 6. Debugging with SWD
- Chapter 7. Using Visual Studio Code
- Appendix A: Using Picoprobe
1、openocd编译安装
1)安装依赖
- sudo apt-get update
- sudo apt-get upgrade
- sudo apt-get install automake autoconf build-essential texinfo libtool libftdi-dev libusb-1.0-0-dev
2)下载
git clone https://github.com/raspberrypi/openocd.git --recursive --branch rp2040 --depth=13)编译
在命令行下,依次执行:
- cd openocd
- ./bootstrap
- ./configure --enable-picoprobe --prefix=/usr/local/openocd
- make -j4
- sudo make install
在运行./configure --enable-picoprobe过程中可能会出现如下错误,该问题是由于pkg-config未安装
- ./configure: line 4520: syntax error near unexpected token `0.23'
- ./configure: line 4520: `PKG_PROG_PKG_CONFIG(0.23)'
使用如下命令安装:
sudo apt install -y pkg-config安装完成后,在命令行下输入:
openocd -v确定安装是否完成。安装成功则会显示如下:
- Open On-Chip Debugger 0.11.0-g4f2ae61-dirty (2022-11-09-22:06)
- Licensed under GNU GPL v2
- For bug reports, read
- OpenOCD: Bug Reporting
由于我们将openocd安装到了/usr/local/openocd目录,执行以上指令会报错,
command not found: openocd则需要手工修改一下环境变量。如在zsh下修改~/.zshrc加入:
export PATH=$PATH:/usr/local/openocd/bin并使用source命令让环境变量生效,可执行:
source ~/.zshrc4)安装GDB
在命令行下输入:
sudo apt install gdb-multiarch安装完成后,确认是否安装成功;在命令行中输入:
gdb-multiarch正常安装会显示如下日志:
- GNU gdb (Ubuntu 9.2-0ubuntu1~20.04.1) 9.2
- Copyright (C) 2020 Free Software Foundation, Inc.
- License GPLv3+: GNU GPL version 3 or later
- This is free software: you are free to change and redistribute it.
- There is NO WARRANTY, to the extent permitted by law.
- Type "show copying" and "show warranty" for details.
- This GDB was configured as "x86_64-linux-gnu".
- Type "show configuration" for configuration details.
- For bug reporting instructions, please see:
- Find the GDB manual and other documentation resources online at:
- For help, type "help".
- Type "apropos word" to search for commands related to "word".
- (gdb)
2、Picoprobe编译与连接
Picoprobe支持swd和uart,可以实现在线debug的同时实现串口日志输出、串口通讯等功能。Picoprobe也是通过Pico(RP2040)实现,相关内容可查看Appendix A: Using Picoprobe 一章。
1)下载、编译
- git clone --recursive https://github.com/raspberrypi/picoprobe.git
- cd picoprobe
- mkdir build && cd build
- cmake ..
- make -j4
该仓库下有freertos和CMSID_5子模块,子模块未下载会编译出错。
编译完成后,会在build目录下生成picoprobe.uf2

按照前文轻松玩转树莓派Pico之一、新手上路一文中更新固件的方式,将picoprobe.uf2更新至作为Picoprobe的开发板中。
2)开发板连接
按照如下方式连接:
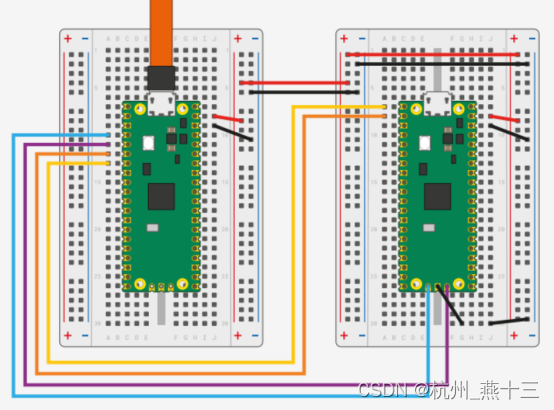
PicoA作为Picoprobe,PicoB作为真实debug开发板
Pico A GND -> Pico B GND
Pico A GP2 -> Pico B SWCLK
Pico A GP3 -> Pico B SWDIO
Pico A GP4/UART1 TX -> Pico B GP1/UART0 RX
Pico A GP5/UART1 RX -> Pico B GP0/UART0 TXPico A VSYS -> Pico B VSYS
这样就可以直接用1个usb接口,同时使用swd和uart功能
3)Picoprobe连接至Linux
由于我是通过vmware虚拟机+ubuntu的开发方式,USB设备默认连接到了Windows主机,需要手工按照“虚拟机”->“可移动设备”->“Picoprobe”->“连接”,将Picoprobe连接到Ubuntu下。

在ubuntu下可通过通过dmesg | grep usb命令查看是否加载成功。

注:每次加载成功后,需要设置一下usb权限;在命令行下输入:
sudo chmod -R 777 /dev/bus/usb/否则在运行中会出现如下错误:
- Error: libusb_open() failed with LIBUSB_ERROR_ACCESS
- Error: Failed to open or find the device
- Error: Can't find a picoprobe device! Please check device connections and permissions.
3、手工运行openocd和gdb
openocd不仅可以用来在线debug,同时也可以用来烧录固件。
1)烧录固件
在命令行下输入:
- cd pico-examples/build/hello_world/serial
- openocd -f interface/picoprobe.cfg -f target/rp2040.cfg -c "program hello_serial.elf verify reset exit"
即可进行固件烧录
2)在线debug
在命令行下输入:
openocd -f interface/picoprobe.cfg -f target/rp2040.cfg -s tcl正常启动openocd,显示日志如下:
- Open On-Chip Debugger 0.11.0-g228ede4-dirty (2022-11-23-18:24)
- Licensed under GNU GPL v2
- For bug reports, read
- http://openocd.org/doc/doxygen/bugs.html
- Info : only one transport option; autoselect 'swd'
- adapter speed: 5000 kHz
- Info : Hardware thread awareness created
- Info : Hardware thread awareness created
- Info : RP2040 Flash Bank Command
- Info : Listening on port 6666 for tcl connections
- Info : Listening on port 4444 for telnet connections
- Info : clock speed 5000 kHz
- Info : SWD DPIDR 0x0bc12477
- Info : SWD DLPIDR 0x00000001
- Info : SWD DPIDR 0x0bc12477
- Info : SWD DLPIDR 0x10000001
- Info : rp2040.core0: hardware has 4 breakpoints, 2 watchpoints
- Info : rp2040.core1: hardware has 4 breakpoints, 2 watchpoints
- Info : starting gdb server for rp2040.core0 on 3333
- Info : Listening on port 3333 for gdb connections
- 同时在另一命令终端中输入:
- cd pico-examples/build/hello_world/serial
- gdb-multiarch hello_serial.elf
在正常显示(gdb) :后输入:
target remote localhost:3333然后就可以输入b main等gdb指令,即可进行手工debug。
4、VSCode在线调试
使用手工运行openocd和gdb,对gdb熟悉度要求很高,我们可以借助VSCode相关功能进行可视化在线调试,无须再次手工输入一堆命令。
相关内容可以查看Chapter 7. Using Visual Studio Code一章。
1)插件安装
- C/C++:用于C/C++语法支持,跳转,运行和调试功能
- CMake:用于Cmake语法支持
- Cmake Tools:让VSCode提供各种CMake编译相关的小工具,包括在底部状态栏显示一些快捷工具
- Cortex-Debug:用来debug ARM cortex-M系列单片机
2)插件配置
VSCode运行和调试功能依赖C/C++插件和工程目录下的.vscode目录下相关.json文件配置。pico-examples工程提供了对应的配置文件。
在命令行下输入:
- cd pico-examples
- mkdir .vscode
- cp ide/vscode/launch-raspberrypi-swd.json .vscode/launch.json
- cp ide/vscode/settings.json .vscode/settings.json
由于我用的是Picoprobe,默认的lauch.json使用的是raspberrypi-swd模式,完成以上操作后,我们需要修改一下launch.json,将
- "configFiles": [
- "interface/raspberrypi-swd.cfg",
- "target/rp2040.cfg"
- ],
修改为:
- "configFiles": [
- "interface/picoprobe.cfg",
- "target/rp2040.cfg"
- ],
"configFiles"配置项为Cortex-Debug插件对应的相关配置文件。
3)Debug
点击VSCode的“运行和调试功能”按钮,点击“debug”按钮,VSCode会将当前目录下多个可执行人文件全部列出,让我们选择需要运行的目标文件。
- 选择对应elf文件
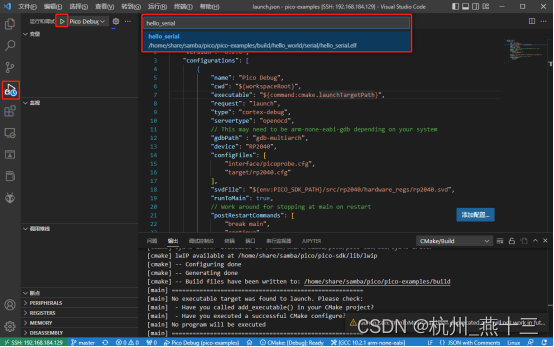
- 在线运行
VSCode会对当前工程下修改的文件做一次编译,编译没有错误后,调用openocd将选择后的elf下载至pico开发板,然后调用gdb,并跳转到main函数。
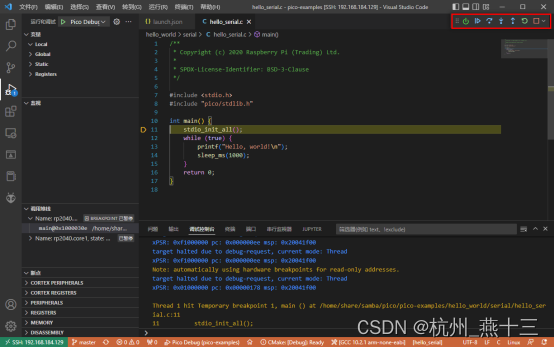
点击右上角调试按钮,即可运行对应功能,分别对应“全速运行”、“运行至断点”、“单步调试”等功能。
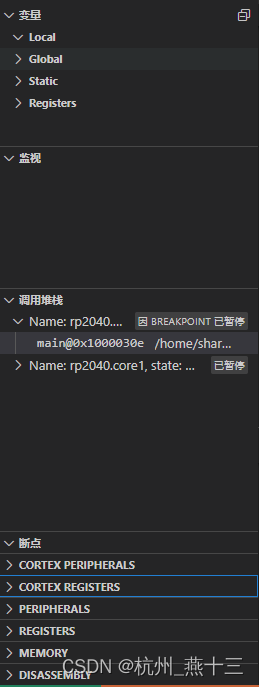
- debug过程中的相关信息查看
可通过“变量”、“监视”、“调用堆栈”、“断点”功能,查看代码运行过程中的相关值。
同时也可以通过Cortex-Debug插件对应的rp2040.svd文件提供的相关信息,查看“CORTEX PERIPHERALS”、“CORTEX REGISTERS”、“PERIPHERALS”等功能实时查看RP2040在运行过程中的状态,用于快速定位问题。
-
相关阅读:
在以「基础设施」为定位的发展阶段里,产业变成了一个可以有诸多创新的存在
技术分享 | 误删表以及表中数据,该如何恢复?
cpu设计和实现(协处理器cp0)
SpringBoot项目中使用Swagger2及注解解释(详细)
小白学安全-漏洞编号的理解 CVE/CAN/BUGTRAQ/CNCVE/CNVD/CNNVD
MongoDB 基础了解(二)
金融机构如何做好中小微物流企业的风控措施?
完整指南:使用JavaScript从零开始构建中国象棋游戏
【总结】ui自动化selenium知识点总结
数据结构 - 跳表
- 原文地址:https://blog.csdn.net/flyingcys/article/details/128010178
