-
【无人机】基于粒子群优化干扰受限下无人机群辅助网络附matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
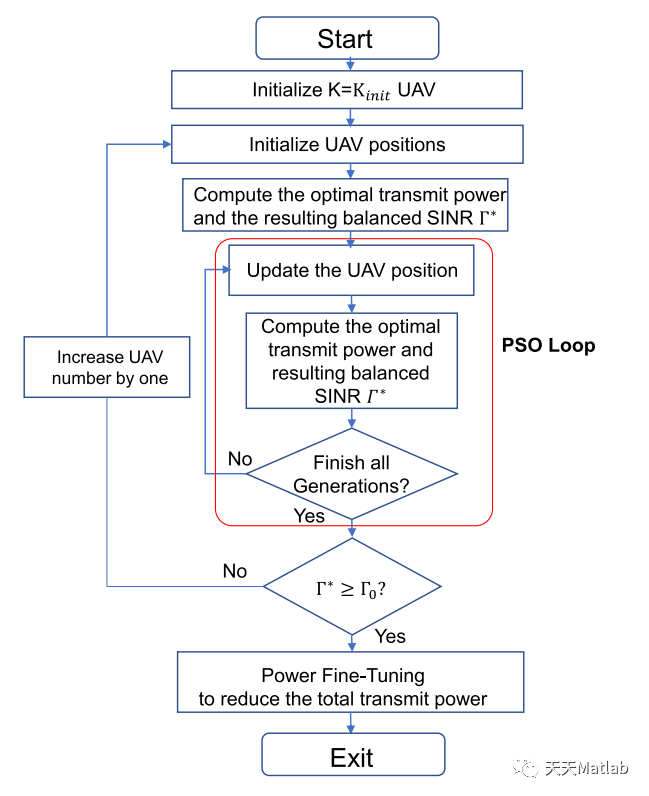
本文研究了三种在实际的空地(ATG)信道模型下的基本部署设计,即最小数量的无人机,它们的最佳部署位置和最佳发射功率分配。由于这三个设计目标是耦合的,结合平衡信号,提出了一种基于粒子群优化(PSO)的方案干扰加噪声比(SINR)发射功率分配。通过利用封闭形式表达式在SINR平衡最优功率分配和由此产生的SINR中,提出了基于PSO的方案迭代优化无人机的数量,然后优化它们的位置,直到每个无人机的SINR用户满足其所需的最小值。为了改进所提出方案的收敛性设计了一些方案,通过分析系统,对无人机的最小数量进行初步估计在使用K-means聚类技术初始化UAV位置之前,求和速率容量。最后开发了功率微调方案以进一步降低总发射功率,广泛的模拟以确认所提出方案的良好性能。

⛄ 部分代码
function [SINR,P ] = Flow_UAV(ITER,X,users_sets)
k_center = size(X,2)/3;
for i = 1: k_center
centerpoint(i,:) = [X(i*3-2),X(i*3-1)];
h(i) = X(i*3);
end
N_users = users_sets;
u_distance = 500;
%all_users = u_distance * rand(200,2);
%load('alluser.mat', 'all_users');
s=ITER;
rng(s);
all_users = 500*rand(users_sets,2);
%% pathloss max choice
N_total = 20;
placement = zeros(N_total,N_users);
for u = 1:N_users
dist_u = zeros(k_center,1);
for N = 1:k_center
dist_u(N) = norm(all_users(u,:) - centerpoint(N,:));
pathloss(u,N) = pathloss3D(dist_u(N),h(N));
end
[N_dist, N_belong] = min(pathloss(u,:));
label(u) = N_belong;
n=hist(label,[1:40]);
for N_tot = 1:N_total
if n(N_tot)>20
pathloss(u,N_tot)=[10^30];pathloss(u+1,N_tot)=[10^30];
end
end
[N_dist, N_belong] = min(pathloss(u,:));
label(u) = N_belong;
placement(label(u),u) = 1;
dist_all(u) = N_dist;
power_normolization(1,u)=1;
yita(u) = 10^-12;
end
%% pathloss
alpha = [0.0001,0.001];
for u_row = 1:N_users
for u_col = 1:N_users
R_deno = norm(all_users(u_row,:)-centerpoint(label(u_row),:));
R_nume = norm(all_users(u_row,:)-centerpoint(label(u_col),:));% the distance between the u_col-th user and the u_row-th user's BS.
g(u_row, u_col,:) = 1/pathloss3D(R_nume, h(label(u_col)));
end
r(u_row) = 1/pathloss3D(R_deno, h(label(u_row)));
end
diag_r = diag(r);
f = g-diag_r*eye(N_users);
for K = 1:k_center %damping factors
for i = 1:N_users
for j = 1:N_users
A(i,j) = alpha((label(i)==label(j))+1);
end
end
DC(:,:,K) = diag(1./r) * ( A.*f+ 10*yita'*placement(K,:) ); %SINR model
[a(:,:,K),b(:,:,K)] = eig(DC(:,:,K));
eigenvalue = diag(b(:,:,K));
lamda(K) = max(eigenvalue);
for i = 1:length(DC(:,:,K))
if lamda(K) == eigenvalue(i)
break;
end
end
y_lamda(:,K) = a(:,i,K);
end
[rho,index] = max(lamda);
SINR = 1/rho;
P(:) = 0.1*y_lamda(:,index)/(placement(index,:)*y_lamda(:,index)); %real power
end
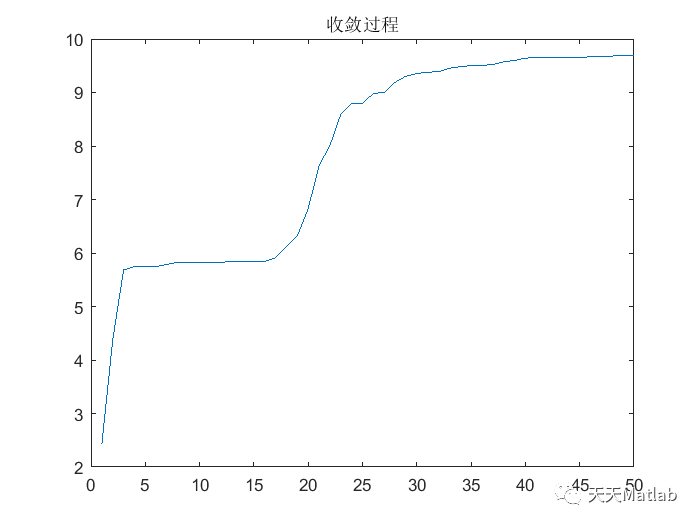
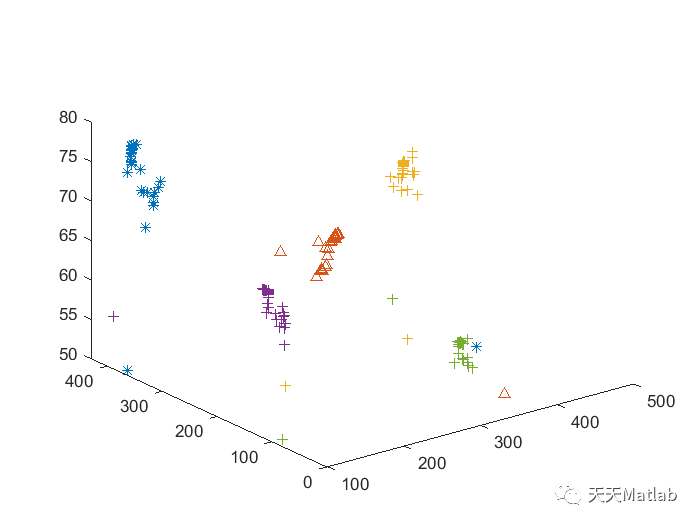
⛄ 运行结果

⛄ 参考文献
[1] Liu W , Niu G , Cao Q , et al. Particle Swarm Optimization for Interference-Limited Unmanned Aerial Vehicle-Assisted Networks[J]. IEEE Access, 2020, 8:174342-174352.
⛄ Matlab代码关注
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料
-
相关阅读:
MySQL 的索引和事务
[Hello World] 二分查找笔记
Go的优雅终止姿势
移动硬盘被格式化了如何恢复数据?四步教你如何恢复
MySQL-使用CPP接入到MySQL
05 参数的点估计
真假难以分辨-C++数据类型
LeetCode常见题型——图
面试经典150题——Day35
测试人员工作中常用的 git 语句汇总总结
- 原文地址:https://blog.csdn.net/matlab_dingdang/article/details/128006041