-
【Paper】2021_多智能体系统滞后一致性研究_马逸文
马逸文. 多智能体系统滞后一致性研究[D].西南民族大学,2021.DOI:10.27417/d.cnki.gxnmc.2021.000193.
第一章 绪论
第三章 二阶离散线性多智能体系统滞后一致性
3.5 数值仿真
x 0 ( k + 1 ) = A x 0 ( k ) + v 0 ( k ) v 0 ( k + 1 ) = B v 0 ( k )
x0(k+1)v0(k+1)=Ax0(k)+v0(k)=Bv0(k)x 0 ( k + 1 ) = A x 0 ( k ) + v 0 ( k ) v 0 ( k + 1 ) = B v 0 ( k ) x i ( k + 1 ) = A x i ( k ) + v i ( k ) v i ( k + 1 ) = B v i ( k ) + a ∑ j = 1 n w i j ( x j ( k ) − x i ( k ) ) − b ( x i ( k ) − x 0 ( k − τ ) ) − c ( v i ( k ) − v 0 ( k − τ ) )
xi(k+1)vi(k+1)=Axi(k)+vi(k)=Bvi(k)+aj=1∑nwij(xj(k)−xi(k))−b(xi(k)−x0(k−τ))−c(vi(k)−v0(k−τ))x i ( k + 1 ) = A x i ( k ) + v i ( k ) v i ( k + 1 ) = B v i ( k ) + a ∑ j = 1 n w i j ( x j ( k ) − x i ( k ) ) − b ( x i ( k ) − x 0 ( k − τ ) ) − c ( v i ( k ) − v 0 ( k − τ ) )
利用基础参数得到的结果如下,对应程序
Main.m
考虑时滞 τ = 0.15 \tau = 0.15 τ=0.15 的情况,对应程序
Main_Tau.m
在上述基础上,修改 A = [ − 0.5 − 0.75 1 − 0.5 ] A = \left[
\right] A=[−0.51−0.75−0.5],对应程序− 0.5 − 0.75 1 − 0.5 Main_Tau1.m,结果为
在上述基础上,修改 A = [ 1 − 1.25 − 1 − 1 ] A = \left[
\right] A=[1−1−1.25−1],对应程序1 − 1.25 − 1 − 1 Main_Tau2.m,结果为
在上述基础上,修改 A = [ 0.5 − 0.25 1 0.5 ] A = \left[
\right] A=[0.51−0.250.5],对应程序0.5 − 0.25 1 0.5 Main_Tau3.m,结果为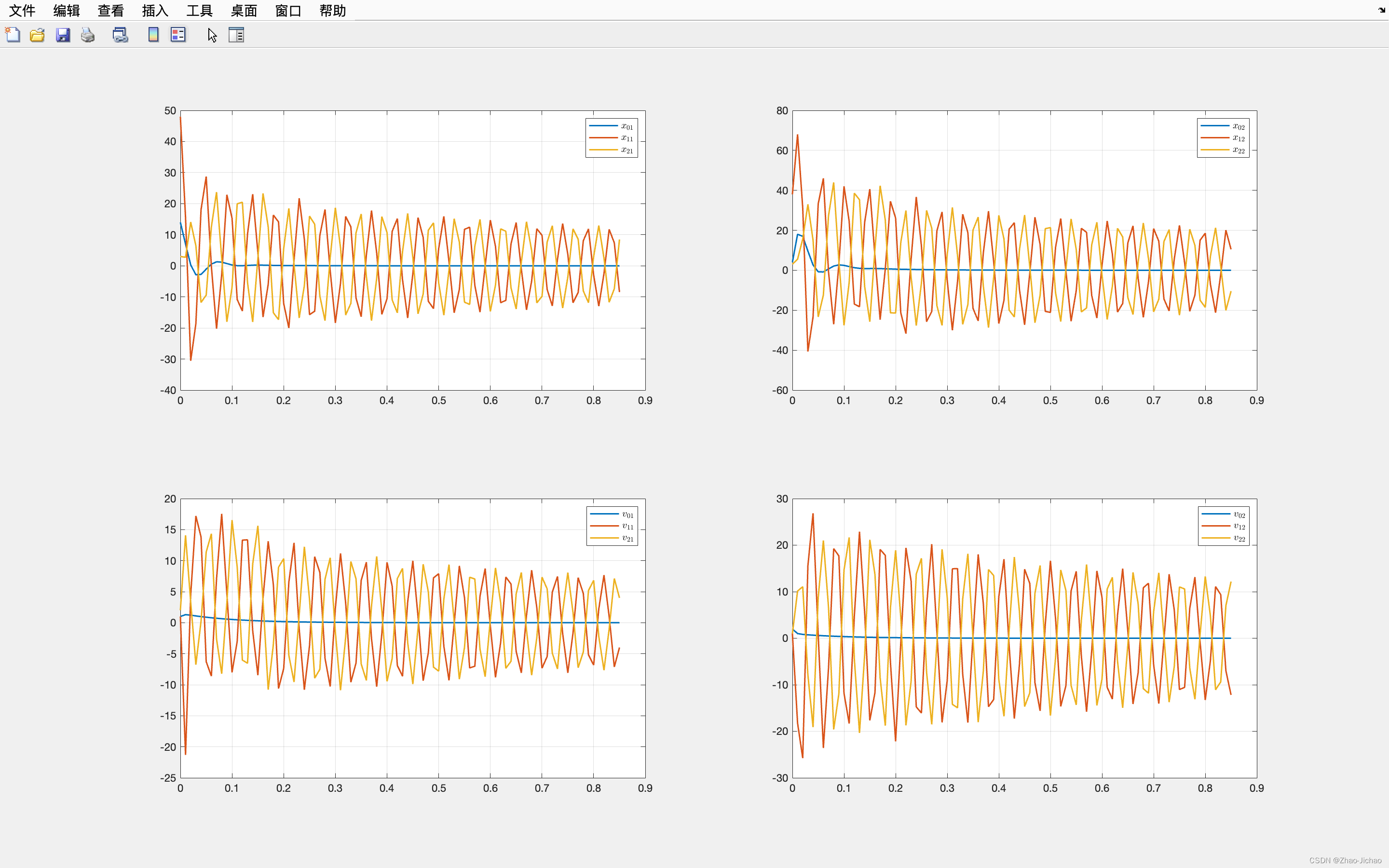
在上述基础上,修改 A = [ 0.5 1.5 1 0.5 ] A = \left[
\right] A=[0.511.50.5],对应程序0.5 1.5 1 0.5 Main_Tau4.m,结果为
可以看到结果并不收敛,同时发现特征根并不与论文一致,计算出来的特征根为 λ 1 = 1.7247 , λ 2 = − 0.7247 \lambda_1 = 1.7247, \lambda_2 = -0.7247 λ1=1.7247,λ2=−0.7247。
自己尝试了一下矩阵,将 A A A 改为 A = [ 0.5 0.15 0.1 0.5 ] A = \left[
\right] A=[0.50.10.150.5] 后,效果还算理想,效果如下。0.5 0.15 0.1 0.5 
x 0 ( k + 1 ) = A x 0 ( k ) + v 0 ( k ) v 0 ( k + 1 ) = B v 0 ( k ) + r 0 ( k ) r 0 ( k + 1 ) = C r 0 ( k )
x0(k+1)v0(k+1)r0(k+1)=Ax0(k)+v0(k)=Bv0(k)+r0(k)=Cr0(k)x 0 ( k + 1 ) = A x 0 ( k ) + v 0 ( k ) v 0 ( k + 1 ) = B v 0 ( k ) + r 0 ( k ) r 0 ( k + 1 ) = C r 0 ( k ) x i ( k + 1 ) = A x i ( k ) + v i ( k ) v i ( k + 1 ) = B v i ( k ) + r i ( k ) r i ( k + 1 ) = C r i ( k ) + a ∑ j = 1 n w i j ( x j ( k ) − x i ( k ) + v j ( k ) − v i ( k ) ) − b ( x i ( k ) − x 0 ( k − τ ) ) − c ( v i ( k ) − v 0 ( k − τ ) ) − d ( r i ( k ) − r 0 ( k − τ ) )
xi(k+1)vi(k+1)ri(k+1)=Axi(k)+vi(k)=Bvi(k)+ri(k)=Cri(k)+aj=1∑nwij(xj(k)−xi(k)+vj(k)−vi(k))−b(xi(k)−x0(k−τ))−c(vi(k)−v0(k−τ))−d(ri(k)−r0(k−τ))x i ( k + 1 ) = A x i ( k ) + v i ( k ) v i ( k + 1 ) = B v i ( k ) + r i ( k ) r i ( k + 1 ) = C r i ( k ) + a ∑ j = 1 n w i j ( x j ( k ) − x i ( k ) + v j ( k ) − v i ( k ) ) − b ( x i ( k ) − x 0 ( k − τ ) ) − c ( v i ( k ) − v 0 ( k − τ ) ) − d ( r i ( k ) − r 0 ( k − τ ) ) -
相关阅读:
新零售系统主要功能有哪些?新零售系统开发公司推荐
设计模式——解释器模式(Interpreter Pattern)+ Spring相关源码
程序员基本功代码
Docker: 小白之路九(从0搭建自己的Docker环境centos7)
tup()是什么意思
ssm+vue的养老院老人健康监护平台(有报告)。Javaee项目,ssm vue前后端分离项目。
ZZULIOJ:1135: 算菜价
C语言——函数
什么是尾调用优化和尾递归?
如何使用Python和大模型进行数据分析和文本生成
- 原文地址:https://blog.csdn.net/weixin_36815313/article/details/127997633